Uncontrolled Flight into Terrain
The Helicopter Company Inc.
Robinson R44 II, C-FGTN
Cambridge, Ontario
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content. Masculine pronouns and position titles may be used to signify all genders to comply with the Canadian Transportation Accident Investigation and Safety Board Act (S.C. 1989, c. 3).
Summary
The crew of the Robinson R44 II helicopter (registration C-FGTN, serial number 10210), operated by The Helicopter Company Inc., was conducting a series of maintenance check flights following a change of the aircraft's main rotor blades. The pilot and aircraft maintenance engineer were tasked with "blade tracking" and the engineer had made pitch link adjustments on the main rotor blades based on the results of two earlier flights. The occurrence flight was conducted with the intention of blade tracking and checking the rotor revolutions per minute during an autorotation procedure.
At approximately 1728 eastern standard time, in low light conditions, the aircraft entered the autorotation at 2400 feet above sea level and continued its descent until it impacted the snow-covered frozen field. The emergency locator transmitter activated and rescue and fire fighting teams responded. Both occupants suffered serious injuries and were ejected from the cockpit when the seat belt attachments failed. The aircraft was destroyed.
Factual information
History of the Flight
On 20 January 2007, the helicopter was flown to the Kitchener/Waterloo Regional Airport for a maintenance inspection. During the inspection, a small delamination was observed on one of the main rotor blades. The aircraft manufacturer requested that the blades be sent back to the factory and replacement blades were shipped in from Vancouver. After the new blades were installed, the aircraft maintenance engineer (AME) installed the strobe gear in preparation for blade tracking. Two maintenance check flights were conducted earlier on the day of the occurrence to track the blades; adjustments were made to one of the pitch links after each of these flights.
The occurrence flight departed the Kitchener/Waterloo Regional Airport at 1722 eastern standard timeFootnote 1 and proceeded south to the Cambridge area at 2400 feet above sea level, which is approximately 1400 feet above ground level (agl). The intention was to track the blades and check the rotor revolutions per minute (RPM) while the helicopter was in an autorotation. This ad hoc procedure of tracking the main rotor blades in an autorotation differed from the manufacturer's procedures listed in the aircraft section below, and was reportedly based on trouble-shooting advice received on a previous occasion. A pre-flight briefing about this procedure was limited to asking the pilot if he was comfortable doing autorotations while the AME tracked the main rotor blades.
In preparation for the autorotation, the pilot flew the aircraft over open fields located southwest of Cambridge. During the autorotation, the AME's attention, which had been focused on the rotor blades, was diverted into the cockpit by an exclamation from the pilot. He observed that the engine/rotor per cent RPM gauge dual pointers were horizontal; indicating approximately 80 per cent, and that the aircraft was pitched nose down. There was no report of a low rotor horn or warning light which are normally set to trigger at 97 per centFootnote 2. The helicopter continued the descent into the snow-covered field. It struck the ground with the front section of both skids and came to rest on its left side, facing in a northerly direction.
Personnel Information
The pilot-in-command was certified and qualified for the flight in accordance with existing regulations and was operating in visual meteorological conditions. He received his private pilot aeroplane licence in July 2000 at the Moncton Flight College. He held a commercial pilot helicopter licence (obtained in October 2002) and had approximately 1300 hours of total flying time; 1000 hours on rotary aircraft. The commercial helicopter flight test in October 2002 was conducted using the Bell 206 and a pilot proficiency check for that aircraft was issued at the same time. He completed his training on the R44 II helicopter on 29 June 2006 and obtained a licence certification of additional privileges in July 2006. He had accumulated approximately 300 hours on type at the time of the accident and had last conducted autorotation training in September 2006.
He was employed as a traffic pilot and was seated in the aircraft right seat during the occurrence flight. The pilot had previously conducted maintenance check flights on the Bell 206 and the R44.
The pilot was interviewed by TSB investigators; however, he did not remember any of the events pertaining to the day of the occurrence.
Aircraft Information
The aircraft was manufactured and imported to Canada in 2005. At the time it was flown to the Kitchener/Waterloo Regional Airport on 20 January 2007 for maintenance, it had accumulated a total of 1082 hours.
The manufacturer's procedure for in-flight track and balance of the main rotor blades is to first adjust the rotor track and balance while the helicopter is in a hover. Then the rotor track is checked at a series of increasing airspeeds. Autorotational RPM is checked after the rotor track and balance is complete. The worksheet recovered from the wreckage indicates the main rotor blades were adjusted twice following hover flights, but there was no record that the rotor tracking procedure at the various forward airspeeds had been completed.
The manufacturer's procedure for checking the rotor RPM in the autorotation specifies that the helicopter be at 1900 pounds gross weight or less and that three readings be taken at 500 to 1000 foot altitude intervals. The autorotation was initiated at 1400 feet agl and the weight of the helicopter was calculated to be 2279 pounds. Using the "AUTOROTATION RPM" chart in the manufacturer's maintenance manual and extrapolating linearly off the chart, the expected autorotation RPM would have been 110.5 per cent (2.5 per cent above the red line - 108 per cent).
The Robinson R44 II Pilot's Operating Handbook (POH) states in the Limitations section the rotor speed limits as follows:
| Tachometer Reading (R) | Actual RPM | |
|---|---|---|
| Power On | ||
| Maximum | 102% | 408 |
| Minimum | 101% | 404 |
| Power Off | ||
| Maximum | 108% | 432 |
| Minimum | 90% | 360 |

Conservation of rotor RPM is critical to a successful autorotation in any helicopter. Once engine power is lost, the pilot must immediately lower the collective lever and establish an autorotative descent at an airspeed recommended by the manufacturer.
The Robinson R44 maintenance manual procedure for checking the rotor RPM in an autorotation specifies that the collective be held firmly against the down-stop and that a descent speed of 50 knots indicated airspeed be maintained. During this procedure one of three scenarios could occur:
- The rotor RPM could climb and, once it showed signs of going above the green arc, the pilot would initiate a recovery to straight and level powered flight.
- The rotor RPM could drop and, once it showed signs of going below the green arc, the pilot would initiate a recovery to straight and level powered flight.
- The rotor RPM could settle somewhere in the green arc, and the pilot would initiate a recovery to straight and level powered flight.
The engineer would take note of the RPM, and the helicopter would return to base for adjustments. The crew would then conduct further flight tests as described in the maintenance manual until the correct adjustment is achieved.
The main rotor blade system of the Robinson R44 II helicopter is considered a "low-inertia rotor system". This term refers to the tendency for the rotor to quickly deplete its stored energy when it is no longer powered. If the collective is not fully lowered, the main rotor RPM will decay causing an aerodynamic stall of the rotor system. Once the main rotor is stalled, recovery is unlikely.
The POH Normal Procedures Section - Practice Autorotation contains a CAUTION which states: "During simulated engine failures, rapid decreases in rotor RPM will occur, requiring immediate lowering of collective to avoid dangerously low rotor RPM. Catastrophic rotor stall could occur if rotor RPM ever drops below 80 per cent plus 1 per cent per 1000 feet of altitude."
Meteorological Information
The aviation routine weather report (METAR) at 1700 for the Kitchener/Waterloo Regional Airport was as follows: wind 250° True (T) at 14 gusting to 20 knots; visibility 9 statute miles (sm); sky clear; temperature -6°C, dew point -12°C; altimeter setting 29.50 inches of mercury (in Hg); and remarks - sea level pressure 1009.0 hectopascals (hPa).
The METAR at 1800 was as follows: wind 250°T at 16 knots; visibility 9 sm; few clouds at 2800 feet, ceiling 3900 feet overcast, 7500 feet overcast; temperature -6°C, dew point -12°C; altimeter setting 29.53 in Hg; and remarks: sea level pressure 1002.0 hPa.
Sunset was at 1734; the flight was conducted in low-light conditions.
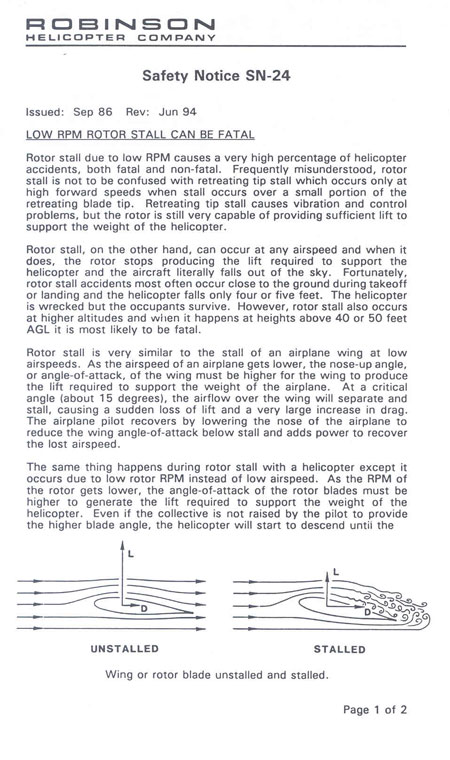
Safety Notices
As a result of various accidents and incidents, the Robinson Helicopter Company has issued numerous safety notices. Safety Notice SN-10 states: "A primary cause of accidents in light helicopters is failure to maintain rotor RPM." Low RPM rotor stall can occur at any airspeed and when it does, the rotor stops producing the lift required to support the helicopter. Safety Notice SN-10 further states: "When the rotor stalls, the blades will either 'blow back' or cut off the tail cone or the rotor will just stop flying, allowing the helicopter to fall at an extreme rate." The following safety notices are relevant to this occurrence and have been included as Appendices to the report:
Examination of Wreckage
The helicopter struck the ground in a nose-down attitude. The forward section of the helicopter, including both front seats and seat belt attachments, was destroyed as a result of the impact. There were no pre-impact structural failures.
Examination of one of the main rotor blades revealed an upward bending, with chord-wise rippling along the span and on the upper skin surface of the blade. The second blade was severely damaged from ground impacts and rippling was not evident. One of the main rotor blade's counterweight had separated from the blade tip and was found near the wreckage site.
The tail rotor components were examined and found to be in serviceable condition with no pre-impact failures evident.
The jam nut on the main rotor pitch link that was being adjusted was tight but not secured with lock wire.
The engine compartment revealed no catastrophic failures. It was clean and free of any oil and hydraulic fluid.
A variety of instruments and two global positioning systems (GPSs) were recovered from the wreckage and forwarded to the TSB Engineering Laboratory to determine the instruments readings at the time of the crash and to extract any relevant data from the GPS's non-volatile memory. The results were as follows:
- The rotor RPM gauge was indicating 98per cent.
- The vertical speed indicator was indicating 800 ft/min down.
- The manifold pressure gauge had two indications. One was in the range of 18 to 19.3 inches of mercury ("hg.) and the other was in the range of 27.7 to 29.3 "hg.
- The Lowrance Airmap 2000c GPS did not record the occurrence flight track and the Garmin Apollo SL60 GPS does not retain flight track data in its non-volatile memory.
The following TSB Engineering Laboratory reports were completed:
- LP019/2007 – Examination of Sony DVCAM
- LP020/2007 – Examination of Instruments
These reports are available from the Transportation Safety Board of Canada upon request.
Analysis
Nothing was found to indicate that any mechanical malfunction initiated or contributed to the accident sequence. Weather conditions would not have affected the performance of the helicopter; therefore, the analysis will concentrate on the procedures and actions related to the autorotation.
The helicopter departed from Cambridge, Ontario on a maintenance test flight. The purpose of the flight was twofold. First, the aircraft maintenance engineer (AME) was attempting to track the main rotor blades while the helicopter was in an autorotation and, second, he wanted to check the autorotational revolutions per minute (RPM). There is a specific procedure in the maintenance manual for checking the autorotational RPM, though it was not reviewed before the flight and was not being followed. Tracking the main rotor blades in an autorotation is not a procedure that is described in the helicopter maintenance manual.
Without a detailed prefight briefing, the pilot might not have been fully aware of what to expect during this maintenance test flight. The consequences of not reviewing the autorotational RPM adjustment procedure prior to the flight included not having enough altitude to properly conduct the test and not being aware that, at its current weight, the target rotor RPM was above the main rotor RPM red line.
The flight was normal up to the point where the autorotation was initiated. At some point during the autorotation, the pilot allowed the rotor RPM to drop to approximately 80 per cent and he was unable to recover before the helicopter hit the ground. The upward bending of the rotor blade confirms that, at some point in the autorotation, the rotor RPM was low. Losing rotor RPM could be the result of incorrect technique when initiating the autorotation or it could have resulted from a failure to continually monitor the RPM throughout the autorotation.
If, during entry into the autorotation, the pilot rolled the throttle off before fully lowering the collective, there would be a sudden drop in rotor RPM. The low inertia rotor system is sensitive and reacts quickly to changes. In this scenario, the low rotor warning horn and light would be activated almost immediately. However, the warning horn may have been activated for a very short time because the standard reaction would be to immediately lower the collective. The pilot's exclamation may have been simultaneous with the low rotor warning and the AME may not have noted the warning horn.
A second scenario would be that the pilot correctly entered the autorotation but diverted his attention from watching the rotor RPM, perhaps to look outside the cockpit to find the strobe targets on the main rotor blades. If the main rotor blade pitch was correct, the relatively high gross weight of the helicopter would tend to overspeed the rotor system as the pilot entered the autorotation (approximately 2.5 per cent). If he noticed an excessively high rotor RPM, the normal reaction to prevent the rotor from overspeeding would be to increase collective, which in turn would increase the blade pitch angle and slow the rotor RPM. If the pilot overcorrected with the collective to the point of slowing the rotor system below 97 per cent, the warning horn and light should have activated as the collective would no longer be fully down. The normal corrective action would be to immediately lower the collective which would silence the warning horn and roll in the throttle.
If the main rotor blade pitch was excessively coarse, the rotor system would tend to slow down as soon as the pilot initiated the autorotation. With the collective lever in the full down position, the low rotor warning system would be disabled. The pilot's surprise exclamation suggests that he became aware that something was not right at some point during descent and it attracted the attention of the engineer who then noted that the rotor RPM was down to approximately 80 per cent. In this scenario, rotor RPM could only be regained by the use of engine power.
When the helicopter struck the ground, the rotor tachometer was indicating 98 per cent, the rate of descent was 800 feet per minute and the helicopter had very little forward speed. All of this indicates that although full throttle had been reapplied during descent, there was insufficient altitude and time to arrest the descent prior to impact.
Findings as to Causes and Contributing Factors
- The aircraft maintenance engineer was attempting to track the main rotor blades while the helicopter was in an autorotation. This procedure was not described in the helicopter maintenance manual. Attempting to combine these two activities likely interfered with the pilot's ability to monitor aircraft performance during the autorotation.
- The gross weight of the helicopter exceeded the maximum specified by the manufacturer for checking rotor revolutions per minute (RPM) in autorotation.
- During the autorotation, the rotor RPM decayed to approximately 80 per cent and, although full throttle had likely been reapplied, there was insufficient altitude and time remaining to arrest the rate of descent prior to impact.
This report concludes the Transportation Safety Board's investigation into this occurrence. Consequently, the Board authorized the release of this report on .