Mid-air collision
York Regional Police
DJI Matrice M210 (remotely piloted aircraft), C-2105569275
and
Canadian Flyers International Inc.
Cessna 172N, C-GKWL
Toronto/Buttonville Municipal Airport, Ontario, 1.2 NM NW
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content. Masculine pronouns and position titles may be used to signify all genders to comply with the Canadian Transportation Accident Investigation and Safety Board Act (S.C. 1989, c. 3).
Summary
On 10 August 2021, the Cessna 172N aircraft (registration C-GKWL, serial number 17268441) operated by Canadian Flyers International Inc. was on a day visual flight rules training flight, on final approach to Runway 15 at Toronto/Buttonville Municipal Airport, Ontario, with a student pilot and flight instructor on board. At approximately 1301 Eastern Daylight Time, the student pilot and flight instructor heard and felt a solid impact at the front of the aircraft. Suspecting a bird strike, they continued the approach and made an uneventful landing, exiting the runway and proceeding to park on the ramp. After parking the aircraft, they observed damage on the front left cowl under the propeller; however, there were no signs that a bird had struck the aircraft.
Shortly afterward, a member of the York Regional Police reported to airport staff that he believed a collision had occurred between the remotely piloted aircraft he had been operating and another aircraft. The remotely piloted aircraft, a DJI Matrice M210 (registration C-2105569275), had been in a stationary hover at 400 feet above ground level when the 2 aircraft collided. The DJI Matrice M210 was destroyed.
There were no injuries to either pilot on the Cessna 172N or to persons on the ground.
1.0 Factual information
1.1 History of the flights
At approximately 1130Footnote 1 on 10 August 2021, the Cessna 172N aircraft (Cessna) (registration C-GKWL, serial number 17268441) operated by Canadian Flyers International Inc. (Canadian Flyers) departed Toronto/Buttonville Municipal Airport (CYKZ), Ontario, on a day visual flight rules (VFR) training flight. A flight instructor and a student pilot were on board. They departed and flew to a practice area to the north of the airport to conduct some exercises.
At approximately 1202, the York Regional Police (YRP) Air Support Unit (ASU) received a request from YRP operations to provide imagery, using a remotely piloted aircraft (RPA), in support of a police operation being conducted 1.2 nautical miles (NM) to the northwest of CYKZ, underneath the approach path for Runway 15.
At 1220, the occurrence RPA pilot arrived in his vehicle at a parking lot located approximately 0.39 NM northeast of the occurrence location. This vehicle contained all of the equipment necessary for his role, including a flat-screen TV onto which he could project the video feed from the RPA.
The RPA was a DJI Matrice M210 (registration C-2105569275). A number of YRP members were preparing for the police operation and waiting for the RPA to be in a position to provide reconnaissance imagery before the operation could be planned and executed.
The RPA pilot began his 1st flight at 1232. The purpose was to conduct a reconnaissance of the operational area, including attempts to locate a potentially armed individual. Shortly after the RPA had become airborne, the RPA pilot made a request to the group of police members standing nearby, asking for somebody to watch the RPA during the flight, and 1 of the nearby officers acknowledged this request.
The flight was conducted over a period of approximately 16 minutes in an attempt to locate the individual, during which the pilot flew the RPA to various locations at the direction of the officer commanding the police operation, who was standing nearby. The RPA pilot landed the RPA at approximately 1248 in order to change the batteries before beginning a 2nd flight.
During this time, the pilots in the Cessna had completed their exercises in the practice area and were returning to the airport. They made the appropriate radio calls declaring their intention to fly over the airport and join the right-hand downwind for Runway 15. There was no other traffic broadcasting on the CYKZ mandatory frequency (MF)Footnote 2 at the time, nor had the pilots heard any other transmissions on the frequency during their return flight. The pilots were actively scanning for other aircraft in the area and did not see any. At approximately 1257, they joined the right-hand downwind for Runway 15, making a radio call as they did so.
At 1256, the RPA pilot began his 2nd flight, during which he would provide a video feed of the site where the police operation was taking place. The RPA was flown to a height of 400 feet above ground level (AGL) and positioned in order to provide the necessary imagery. The RPA remained stationary while the police members close to the RPA pilot were able to watch the operation unfold on the TV display.
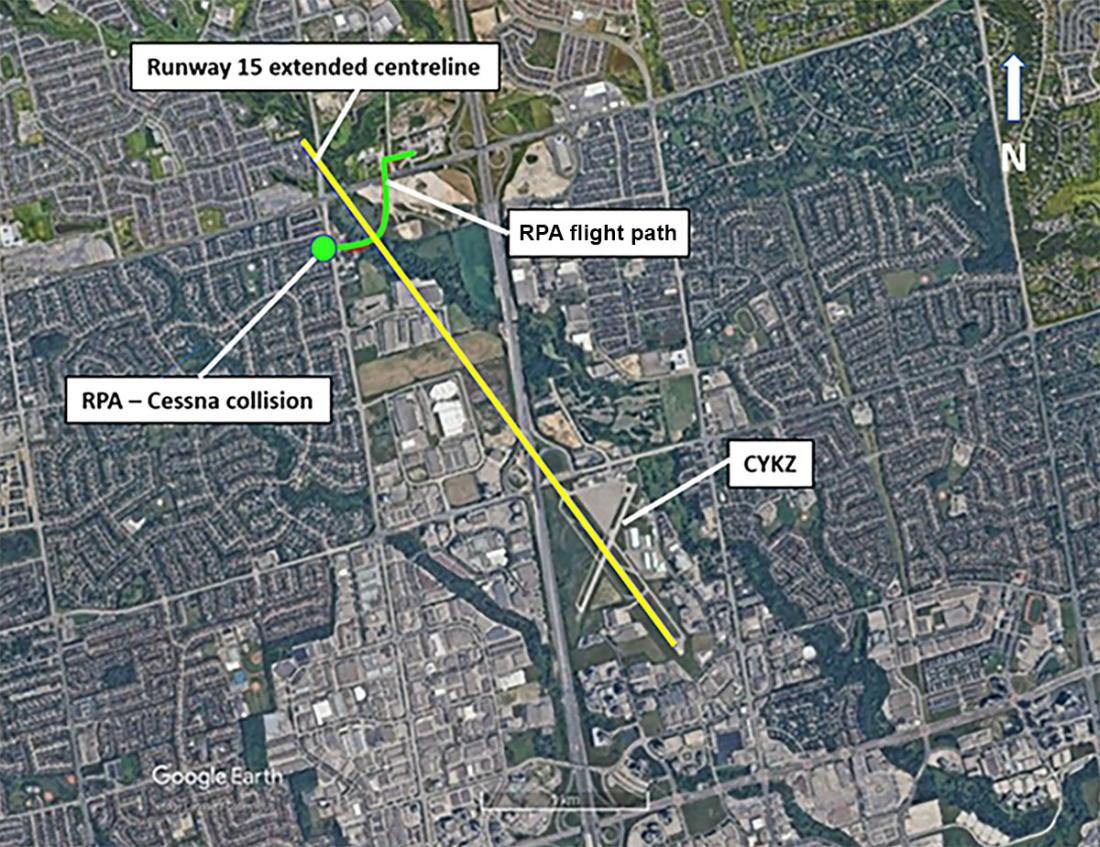
The RPA was in a stationary hover for more than 2 minutes when, at 1301, a collision occurred with the Cessna, which was on final approach for Runway 15 (Figure 1), approximately 1.2 NM from the threshold, and travelling at approximately 65 knots.
The pilots of the Cessna heard and felt a solid impact and suspected that they had hit a bird. The airplane continued to fly normally, and the pilots continued their approach to an uneventful landing. The pilots taxied back to the parking area, where they shut down the airplane before exiting it to assess the damage.
The RPA pilot, upon losing all communication with the RPA, began to scan the sky in an effort to locate the RPA. He heard and then saw the airplane. Based on its position and direction of flight, it became apparent to him that there had been a collision between the RPA and the airplane.
At 1305, the RPA pilot phoned the airport manager at CYKZ to report the suspected collision and verify whether the airplane had landed safely. The airport manager had not yet been made aware of the collision, but found out shortly after that a potential bird strike had been reported.
After the pilots of the Cessna and the maintenance staff at Canadian Flyers became aware of the report from the YRP RPA pilot of a possible collision, it became clear to them that the collision had been with the RPA, rather than a bird.
1.2 Injuries to persons
There were no injuries.
1.3 Damage to aircraft
1.3.1 Cessna 172N
The Cessna had damage to the left lower engine cowling and carburetor air-box and minor scratches on the propeller (Figure 2).

1.3.2 Remotely piloted aircraft
The RPA was destroyed (Figure 3).

1.4 Other damage
There was no other damage.
1.5 Personnel information
1.5.1 Cessna 172N pilots
At the time of the occurrence flight, both the instructor and student pilot held the appropriate licences and had valid medical certificates in accordance with existing regulations.
1.5.2 Remotely piloted aircraft pilot
Records indicated that the RPA pilot was certified and qualified for the flight in accordance with existing regulations: he held a valid pilot certificate – small remotely piloted aircraft (VLOS)Footnote 3 – advanced operations. In addition, the RPA pilot had a Restricted Operator Certificate with Aeronautical Qualification (ROC-A), allowing him to operate an aviation radio, which he knew how to use.
1.6 Aircraft information
1.6.1 Cessna 172N
The Cessna 172N is a single-engine, high-wing aircraft used at many flight schools around the world. The occurrence Cessna 172N was built in 1976. The investigation did not identify any issues related to aircraft equipment, maintenance, or certification or any issues that would have prevented the aircraft from operating normally during the occurrence flight.
1.6.2 DJI Matrice M210
The DJI Matrice M210 is a quadcopter-type RPA with a maximum take-off weight of 6.14 kg (13.5 pounds) and dimensions of 34.9 by 34.6 by 14.9 inches (887 by 880 by 378 mm) (Figure 4). Depending on the intended mission, different payloads can be attached to it, such as infrared or high definition cameras. The RPA is controlled by using a remote control with an integrated viewfinder, or by plugging a smartphone into a controller and using the smartphone screen as the viewfinder.

The occurrence pilot was flying the RPA using a DJI Cendence smart controller equipped with a DJI CrystalSky monitor (Figure 5). The video feed was also set up to display on a flat-screen TV display mounted on the RPA deployment vehicle. The TV display shows the aerial images in real time, but does not display the telemetry information that is shown on the CrystalSky monitor mounted above the Cendence controller, which includes altitude information and traffic warnings.
The RPA is equipped with an Automatic Dependent Surveillance–Broadcast (ADS-B) receiver, which picks up signals from ADS-B-equipped aircraft nearby and alerts RPA pilots with a traffic warning. The Cessna was not equipped with ADS-B and would therefore not have generated a traffic warning.
The occurrence RPA was registered with Transport Canada (TC) as required by regulations.

1.7 Meteorological information
At the time of the occurrence, the nearest weather reporting station, at Toronto/Lester B. Pearson International Airport (CYYZ), 16 NM to the southwest, indicated a ceiling of broken clouds at 2200 feet AGL, an overcast layer at 13000 feet AGL, wind from 160° true at 10 knots, and visibility of 15 statute miles.
The weather was not considered a factor in this occurrence.
1.8 Aids to navigation
Not applicable.
1.9 Communications
The airspace surrounding CYKZ is a Class E control zone from the ground to 2000 feet above sea level, which uses an MF of 124.8 MHz for communication.
In Class E controlled airspace, air traffic control (ATC) provides separation between aircraft operating under instrument flight rules. For aircraft operating under VFR, however, ATC only provides traffic information upon pilot request and when workload permits.
Aircraft conducting VFR flights at CYKZ are required by regulation to broadcast their intentions and maintain a listening watch on the MF.Footnote 4 During the occurrence, the Cessna pilots were monitoring and broadcasting on the MF as required. RPA pilots are not required to broadcast their intentions when in controlled airspace.
RPA operators are required to receive authorization from the provider of air traffic services (ATS) to operate in controlled airspace (see section 1.17.2.1). The request for this authorization must include contact information for the pilot, and “the means by which two-way communications with the appropriate air traffic control unit will be maintained.”Footnote 5
When authorization is granted from ATS, a telephone number for the relevant ATC unit is included in the authorization. This telephone number is to be used in case of an emergency or loss of control of the RPA. This exchange of contact information between RPA pilot and ATS is meant to satisfy the Canadian Aviation Regulations (CARs) requirement that two-way communications be maintained.
Although not required by regulation, the pilot of the RPA was monitoring the MF using a handheld very high frequency (VHF) radio during the occurrence.
1.10 Aerodrome information
CYKZ is located in Markham, Ontario, and is surrounded by numerous commercial buildings, highways, and high-density housing complexes.
The airport has 2 intersecting runways: Runway 03/21 and Runway 15/33. The circuit pattern for Runway 15 is designated as a right-hand circuit; at the time of the occurrence, the Cessna was flying in accordance with this pattern.
1.11 Flight recorders
The occurrence airplane was not equipped with a flight data recorder or a cockpit voice recorder, and neither of these devices were required by regulations.
The flight parameters for the RPA were recorded on an onboard memory card. The data it contained were recovered and were useful to the investigation.
1.12 Wreckage and impact information
The Cessna sustained damage to the front cowl and the carburetor air box. The propeller sustained some minor scratches.
The DJI Matrice M210 was destroyed as a result of the collision. Most of its parts were recovered near the site of the police operation by YRP members following a brief search. The parts were sent to the TSB Engineering Laboratory in Ottawa, Ontario. The non-volatile memory recovered from the RPA yielded data about the exact location of the RPA at the time of the collision. The location corresponds to the position of the Cessna, and was along the standard final approach path to Runway 15.
1.13 Medical and pathological information
According to information gathered during the investigation, there was no indication that the performance of any of the pilots was affected by medical factors or fatigue.
1.14 Fire
There was no fire either before or after the occurrence.
1.15 Survival aspects
Given that the RPA impacted the lower cowl of the Cessna, the airplane livable space was not affected during the collision.
Testing by the National Research Council of Canada was documented in its 2020 report entitled Drone impact assessment on aircraft structure: windshield and leading edge testing and analysis.Footnote 6 The testing was carried out using the same testing procedures used to assess the ability of aircraft windshields and wing leading edge structures to withstand bird strikes. This testing was conducted on windshields and wing leading edge structures that were representative of large commercial aircraft. Although these structures are constructed differently than those of light aircraft, the materials are similar. The testing was conducted at speeds of 140 and 250 knots, which are higher than the speeds at which smaller aircraft typically fly at.
The RPA used for the testing weighed approximately 2.6 pounds, while the birds used in previous testing weighed 4 pounds. The damage caused by the RPA, especially during windshield testing, was significantly more substantial than that caused by birds in previous testing, despite the lower weight of the RPA.
1.16 Tests and research
1.16.1 TSB laboratory reports
The TSB completed the following laboratory report in support of this investigation:
- LP106/2021 – NVM Data Recovery - RPASFootnote 7
1.17 Organizational and management information
1.17.1 Transport Canada
On 01 June 2019, TC issued Part IX of the CARs, which covers the operations of RPA in Canadian airspace, in addition to licensing and equipment requirements.
For certain types of RPA operations an operator must apply for a special flight operations certificate (SFOC). Some of these operations include flying an RPA beyond visual line-of-sight (BVLOS), flying an RPA weighing more than 25 kg, and operating an RPA at altitudes above 400 feet AGL.Footnote 8
Most small RPA operators do not conduct these types of operations, and therefore do not require an SFOC. Because no operating certificate is required, TC does not review or approve manuals, procedures, or training, nor does it conduct inspections or surveillance on most small RPA operators, such as YRP.
1.17.2 NAV CANADA
NAV CANADA is a non-profit corporation that owns and operates Canada’s civil air navigation system, including the provision of air traffic services. Operation of RPA in controlled airspace requires authorization from NAV CANADA.Footnote 9 This authorization can only be obtained through its proprietary software, called NAV Drone.
1.17.2.1 NAV Drone
NAV Drone is an application developed by NAV CANADA that became operational on 03 June 2021. It is available as a mobile application and as a web application. It functions as an RPA flight planning tool, and assists with the planning by providing warnings to users about safety or regulatory issues based on the flight plan parameters entered. It also incorporates a map of the flight planned area that shows boundaries for varying types of airspace. Users of NAV Drone have a personal profile containing their credentials, and the registration information for RPA that they have added to their profile.
To operate in controlled airspace, RPA operators are required to provide NAV CANADA with the details of their proposed operation before it begins and request authorization. In many cases, depending on the type of airspace, the authorization will occur automatically, and be received almost immediately upon request.
When a request is made for flight in an area with more complex airspace, or interferes with arrival and departure paths for aircraft, the request is routed to the appropriate ATC unit which will review the request and determine whether or not the authorization can be granted. According to NAV CANADA’s records, since the NAV Drone system was launched, over 70% of all requests have been processed within 24 hours, with over 40% actioned in less than 12 hours. The average response time of all authorizations in 2022 was 9 hours. However, more complex requests may take as long as 48 hours to be authorized or rejected.
At the time of the occurrence, there was no means within the NAV Drone system to give priority to requests by police operators. TC can grant an exemption from CARs section 901.71, allowing first responders to fly in controlled airspace with specific mitigations, such as an additional visual observer, without permission from NAV CANADA. However, an RPA pilot operating under this exemption is still required to advise the appropriate ATS unit by telephone for their awareness. YRP had no such exemption from TC.
The pilot of the occurrence RPA was aware of the NAV Drone application and knew that the operation on the day of the occurrence would take place entirely within the CYKZ control zone, therefore requiring authorization from ATS.
Due to the nature of the police operation underway, which involved a potentially armed individual, the RPA pilot felt a sense of urgency to get the RPA airborne as soon as possible. As well, the RPA pilot had not observed any traffic in the area during the set up of the RPA and had heard no recent transmissions on the hand-held VHF radio. As a result, the RPA pilot did not request authorization.
TSB investigators conducted a test using NAV Drone on 21 October 2021 to see if authorization would be granted to fly an RPA at the location of the collision, with a height restriction of 400 feet AGL. Due to the location and altitude submitted, and several other factors assessed by the relevant ATC unit, the request was denied, and the investigators were told to resubmit the request with a height restriction of 100 feet AGL.
Some of the factors that ATC assesses before issuing an authorization are variable. As a result, it could not be determined whether a request to operate the occurrence RPA flight on the day of the occurrence would have been authorized.
1.17.3 York Regional Police
The YRP serves the York Region, an area with more than 1.2 million inhabitants.
At the time of the occurrence, the following 5 units within the YRP were using RPA: Air Support (ASU), Public Safety, Major Collision Investigations, Corporate Communications, and Multi Media Support. Each of these units used its own RPA, and had its own pilots. Each unit has a typical mission profile, which can be quite different from one another.
The RPA involved in this occurrence was being operated by the ASU, whose typical mission consists of providing real-time imagery in support of ground-based police activity.
1.17.3.1 Air Support Unit
The ASU was formed to support aerial operations in an Airbus EC120B helicopter owned by the YRP, which is flown by civilian pilots. Members of the ASU, known as tactical flight officers (TFOs), are trained in patrol and suspect tactics, airborne surveillance, and advanced thermal imaging.Footnote 10
The primary role of the TFO is to liaise between the police on the ground and the helicopter pilot so that the pilot can focus on manoeuvring the helicopter safely. TFOs receive training with respect to helicopter operations, but are not pilots themselves, and are not permitted to manipulate the controls of the helicopter. At the time of the occurrence, the YRP’s helicopter was managed and operated by Canadian Helicopters Ltd. Since the helicopter is managed by a third party, the YRP does not have, nor is it required to have, an air operator certificate. As a result, it is not required to employ personnel with relevant aviation experience to oversee its flight operations; this role is assumed by the management company.
In 2018, the ASU began to use RPA as an alternative to using the helicopter. As the TFOs were already trained in airborne surveillance and imaging, it was decided that TFOs would also be trained to pilot RPA, in addition to maintaining their TFO duties.
1.17.3.2 Command Directive LE-388
In November 2019, the YRP issued an updated version of Command Directive LE-388, Remotely Piloted Aircraft (RPA) Operations. Footnote 11 This document outlines the roles and responsibilities of YRP members with respect to RPA operations, including the deployment of RPA, and the response to any incidents involving these operations.
The Command Directive requires the RPA pilots to operate according to the regulations as set out in Part IX of the CARs. When making reference to the regulations, the Command Directive guidance is consistent with the CARs in all but one instance: the definition of a visual observer.
1.17.3.2.1 Visual observer
For RPA operations without an SFOC, such as the YRP operation on the day of the occurrence, the CARs state that “no pilot shall operate a remotely piloted aircraft system unless the pilot or a visual observer has the aircraft in visual line-of-sight at all times during flight.”Footnote 12
Typical YRP RPA operations, including those that took place on the day of the occurrence, require that the pilot, in addition to controlling and monitoring the RPA, operate the camera system, requiring the pilot to monitor the video feed. As a result, pilots are not always able to maintain VLOS with the RPA throughout the flight and are required to have the assistance of a visual observer.
The CARs provide the following definition of a visual observer:
visual observer means a trained crew member who assists the pilot in ensuring the safe conduct of a flight under visual line-of-sight.Footnote 13
The YRP chose to alter this definition within the Command Directive, and define a visual observer as:
a member of YRP or another police service who maintains visual observations of an RPA during flight operations.Footnote 14
The CARs definition specifically states that the visual observer is a trained crew member, whereas the Command Directive definition does not mention training and requires only that the visual observer be a member of a police service.
While there is no mention of training for a visual observer in the Command Directive, it does state that “[t]he RPA Pilot shall […] brief the designated Visual Observer and ensure they are capable of completing their responsibilities.”Footnote 15 The directive then lists these responsibilities of the visual observer as follows:
The Visual Observer, (if Utilized):
(a) familiarize themselves with the role of Visual Observer as detailed by the RPAs Pilot
(b) maintain a consistent line of sight with the RPAs while in flight; and
(c) immediately notify the RPA Pilot of any safety issues or concerns.Footnote 16
The CARs do not detail the training that a visual observer should receive; however, additional information and guidance regarding the nature of the training is found in the Transport Canada Aeronautical Information Manual (TC AIM),Footnote 17 a document meant to be used in conjunction with the CARs. The TC AIM expands upon the regulations and provides some interpretation of how to comply with the CARs.
The TC AIM provides a description of the role, including the following statement:
Visual observers shall be trained to perform any duties as assigned to them by the pilot. This includes visual scanning techniques, aircraft identification, communications, and any other knowledge that may be required to successfully perform their duties.Footnote 18
During the day of the occurrence, the RPA pilot asked for another officer to be a visual observer. Although a nearby officer acknowledged the request, the RPA pilot did not confirm who, among the officers present, would assume that role, nor did he inform that specific officer what their duties or responsibilities would be. The officer was not aware of the requirement to maintain visual contact with the RPA.
The officer who was acting as the visual observer was observing the TV display for much of the time that the RPA was airborne and did not see or hear any airborne traffic, nor could he recall hearing any radio calls over the RPA pilot’s portable VHF radio.
1.17.3.3 Pilot training and licensing for remotely piloted aircraft
The YRP uses commercially available training programs almost exclusively when training its RPA pilots. Each pilot holds a pilot certificate – small remotely piloted aircraft (VLOS) – advanced operations, issued by TC, allowing them to fly RPA in controlled airspace pending authorization from the ATS provider in the area.
1.17.3.4 Pilot checklist
For all YRP RPA operations, RPA pilots are required to use the RPAS Pilot Checklist, a single-page checklist divided into sections that correspond to all phases of flight. On the back of the page is a list of contact numbers and radio frequencies applicable to their area of operations. This checklist is kept in a storage box, which is normally stowed in the RPA deployment vehicle.
On the day of the occurrence, the RPA pilot did not retrieve the checklist from the storage box and did not refer to any written checklist during either flight leading up to the occurrence, relying on memory to accomplish the checklist items. One such item was the site survey, for which the requirements are listed in the CARs.Footnote 19 It could not be determined whether all of the items listed in the CARs were completed as part of the site survey on the day of the occurrence. Afterwards, the RPA pilot relied on the self-testing functions of the RPA itself to verify that it was ready for flight.
In the 1st section of the RPAS Pilot Checklist, titled “Secure Takeoff and Landing Zone (LZ),” the following 3 items are listed:
- As per Site Survey determine LZ [landing zone] and close off LZ. […]
- Brief Crew on Flight Operation, Emergency Plan, Equipment Location and Use.
- Check Airspace and file Flight Authorization if required.Footnote 20
The 2nd item appears to refer to the visual observer, although this is not clearly stated. There are no checklist items prompting the RPA pilot to select or designate a visual observer at any time before or during the flight; however, later checklist sections refer to a visual observer. The 3rd item in this section reminds pilots to file flight authorization, if required, using the NAV Drone application.
The 2nd section of the checklist, titled “Pre-Flight,” deals with assembling and inspecting the RPA, and powering it on. The final item in this section instructs pilots to:
“Confirm RPA/Controller unlocked for flights in all airspace.”Footnote 21
When flight near an airport or in a restricted zone, such as airport take-off or approach path, is attempted, the on-screen prompts on the RPA controller normally require pilots to indicate that they have received authorization for the flight before an RPA can be flown; however, the YRP requested that DJI unlock its RPAs to facilitate the use of the RPAs for police activity.Footnote 22 This request was granted, and as a result, the software on a YRP RPA does not prompt the pilot to receive and acknowledge having obtained authorization before the RPA is allowed to take off in controlled airspace.Footnote 23,Footnote 24
The 4th section of the checklist contains 3 items for the airborne phase of flight (called “Operation” phase), related to the pilot or visual observer maintaining visual line-of-sight with the RPA.
- Maintain VLOS.
- Pilot announce intentions to Visual Observer, Visual Observer to confirm.
- Maintain Communication between Pilot, Visual Observer, and other aircraft as neccesary [sic].Footnote 25
The checklist section assumes the presence of a visual observer, and does not offer alternative actions in the event that an observer is not used.
1.18 Additional information
1.18.1 Collision avoidance and visual scanning
The see-and-avoid principle is the basic method of collision avoidance for VFR flights that is based on active scanning, and the ability to detect conflicting aircraft and take appropriate measures to avoid them. It has been examined in a number of other TSB investigations,Footnote 26 and the TSB has found that, because of its limitations, the see-and-avoid principle cannot be used as the sole means of preventing aircraft collisions when operating under VFR.
A 1991 research paper by the Australian Transport Safety Bureau describes some of the limitations of the see-and-avoid principle. These limitations were researched with respect to detecting manned aircraft, which are much larger than the RPA from this occurrence. The following statements are found in this paper:
The physical limitations of the human eye are such that even the most careful search does not guarantee that traffic will be sighted. […]
An object which is smaller than the eye's acuity threshold is unlikely to be detected and even less likely to be identified as an approaching aircraft. […]
The human visual system is better at detecting moving targets than stationary targets, yet in most cases, an aircraft on a collision course appears as a stationary target in the pilot's visual field. […]
[C]omplex backgrounds such as ground features or clouds hamper the identification of aircraft via a visual effect known as ‘contour interaction'. This occurs when background contours interact with the form of the aircraft, producing a less distinct image.Footnote 27
1.18.2 Task saturation
Task saturation is the point at which the number of tasks required of a person exceeds that person’s capacity to perform them to an acceptable standard. People who are task saturated are unable to accept additional tasks, and likely will not be able to perform current tasks at a high level. A person who is task saturated may revert to what is known as tunnel vision, where they focus on one specific task to the exclusion of others.
1.18.2.1 Tasks required while piloting a remotely piloted aircraft
RPA are normally controlled using a handheld controller, which controls the RPA via a radio link or signal. Most commercially available RPA come with either a built-in camera, or the option for the users to select their own camera according to their needs. The pilot is able to see the camera’s output on a screen (also known as a first-person view device). This device normally provides useful telemetry such as the altitude of the RPA and remaining battery life and can either be part of the controller, or be a device with a screen (a smartphone in some cases), which can be plugged into the controller.
Although many RPA include sensors and GPS (global positioning system) databases of obstacles to help avoid collisions, and, in some instances, provide airborne traffic warnings, they do not remove the requirement of the RPA pilot, in concert with a visual observer if necessary, to avoid collisions with objects, people, or other aircraft.
For certain types of RPA operations, such as the YRP operation, pilots will use the first-person view device throughout most of the flight rather than fly by directly observing the position of their machine in the sky. Because VLOS cannot be maintained by the pilot during this type of operation, visual observers are used.
Although the visual observer reduces the RPA pilot’s workload by relieving him or her of the requirement to maintain sight of the RPA, the pilot still typically accomplishes numerous other tasks, which can lead to a high workload. Effectively, the RPA pilot is operating both an aircraft and a camera system simultaneously through use of the first-person view device.
During the occurrence flight, when the objective was to provide overwatch for tactical team colleagues on the ground, the RPA pilot was responsible for the following tasks:
- Controlling the RPA
- Monitoring the video feed from the RPA
- Monitoring communications on his police radio, including the communications between those actively involved in the operation
- Monitoring a handheld VHF radio (for airplane broadcasts)
- Monitoring the discussions and fielding questions from YRP members who were watching the video feed
- Maintaining communication with the visual observer (according to YRP guidance)
The RPA pilot did not recall hearing any transmission on the VHF radio during either of the RPA flights, nor did he hear the sound of the approaching Cessna before the collision. Although he had recruited a visual observer, he did not recall any ongoing communication with this person during the flights.
2.0 Analysis
The pilots of both the remotely piloted aircraft (RPA) and the Cessna 172N (Cessna) held the appropriate licences and certificates for their respective intended flights. There was no indication that their performance had been affected by medical factors or fatigue. In addition, weather conditions on the day of the occurrence were suitable for visual flight rules (VFR) flight.
The analysis will focus on explaining why the Cessna flight crew’s visual scanning and collision avoidance efforts were unsuccessful, what procedures were in place at the York Regional Police (YRP) for RPA operations, and why the RPA pilot and visual observer did not recognize the conflict before the collision occurred.
2.1 Collision avoidance and visual scanning
The pilots aboard the Cessna were operating according to established circuit procedures and were on a standard final approach profile to Runway 15. To reduce conflicts with other traffic in the vicinity, they were broadcasting their location on the airport’s mandatory frequency, and monitoring the frequency for transmissions from other aircraft. The pilots did not hear any other traffic on the frequency and were not aware of any traffic in the area.
In addition to monitoring the frequency, the Cessna pilots were using the principles of see-and-avoid as they flew the circuit, and they were actively scanning the area. By the time the 2 aircraft were in close proximity, the RPA was directly in front of the Cessna as the Cessna descended on final approach. This meant that the relatively small RPA would have been almost stationary if viewed from the Cessna cockpit and set against a complex background of urban buildings and ground features. The small size of the RPA may have resulted in a visual cue that was smaller than the visual acuity threshold of the Cessna pilots’ eyes, and the absence of background contour between the black RPA and the urban landscape would have made the RPA very difficult to see, even if the flight crew had been aware of its presence.
Finding as to causes and contributing factors
The flight crew of the Cessna 172N was unaware of the presence of airborne RPA traffic in the vicinity and, due to several factors, the active scanning that is part of the see-and-avoid principle was unsuccessful in identifying the conflict.
2.2 Remotely piloted aircraft operations at York Regional Police
The YRP Command Directive for RPA operations stipulates that all RPA pilots shall follow the regulations as prescribed in Part IX of the Canadian Aviation Regulations (CARs) and outlines the roles and responsibilities of YRP members as well as the checklist to be used during RPA operations.
2.2.1 Checklist usage
For each RPA operation, YRP RPA pilots are required to use the RPAS Pilot Checklist, and a copy of the checklist is normally stowed in each RPA deployment vehicle. On the day of the occurrence, the RPA pilot did not consult the checklist stowed in his vehicle, but rather chose to complete the checklist items from memory.
Finding as to risk
If pilots do not consult established checklists before and during flight operations, there is a risk that checklist items deemed critical to the safety of the flight will be omitted.
2.2.2 Visual observer
The 2nd item in the first section of the RPAS Pilot Checklist instructs pilots to “Brief Crew on Flight Operation.” Although this instruction does not explicitly state that a briefing is to be provided to the visual observer, it is implied that this crew member is included. YRP RPA operations require a visual observer due to the fact that the RPA pilot is busy operating the camera and cannot maintain visual line-of-sight (VLOS) with the RPA as required by regulation.
The YRP Command Directive contains basic guidance for visual observers, instructing them to familiarize themselves with the role of visual observer as detailed by RPA pilots, to maintain VLOS with RPAs while in flight, and to notify RPA pilots of any issues or concerns. On the day of the occurrence, after the RPA was already airborne, the RPA pilot made a request to the group of police members standing nearby, asking for somebody to watch the RPA during the flight, and one of the nearby officers acknowledged this request. However, the RPA pilot did not provide this officer with a briefing or explain the duties or responsibilities involved.
The definition of a visual observer found in the YRP Command Directive differs from that found in the CARs. The CARs definition specifically states that the visual observer is a trained crew member, whereas the Command Directive definition does not mention training and requires only that the visual observer be a member of a police service. Although the visual observer’s general responsibilities are listed in the Directive, YRP members who are not frequently associated with RPA operations may not be familiar with the guidance, and without the training required by regulation or a briefing provided by the RPA operator, they may not sufficiently understand their role or have the skills to be effective.
In this occurrence, in the moments leading up to the collision, the selected visual observer was viewing the TV monitor rather than maintaining VLOS with the RPA.
Finding as to causes and contributing factors
YRP policy does not require that visual observers be trained crew members, and the RPA pilot did not brief the visual observer on his role and responsibilities before the operation. As a result, the visual observer was not aware of the requirement to maintain VLOS with the RPA, nor was he trained in visual scanning techniques or aircraft identification.
2.2.3 Authorization for operations in controlled airspace
The 3rd item in the first section of the RPAS Pilot Checklist instructs pilots to file flight authorization where required. The pilot of the occurrence RPA knew that the operation on the day of the occurrence would take place within the Toronto/Buttonville Municipal Airport (CYKZ) control zone and would therefore require authorization from air traffic services (ATS).
Due to the nature of the police operation underway, which involved a potentially armed individual, the RPA pilot felt a sense of urgency to get the RPA airborne as soon as possible. Additionally, the RPA pilot had not observed any traffic in the area during the set up of the RPA and had heard no recent transmissions on the very high frequency (VHF) radio. As a result, the RPA pilot decided to forego seeking authorization for this flight in order to provide more timely imagery to his colleagues, who were waiting nearby.
Because several variables are involved in each individual approval, it could not be determined whether the authorization would have been approved by ATS if it had been requested.
Finding as to risk
If RPA operators who plan to operate in controlled airspace do not communicate their flight intentions with, and receive authorization from, the ATS provider, there is an increased risk of conflict or collision with another aircraft.
2.2.4 Task saturation
At the YRP, both the role of RPA pilot and that of the tactical flight officer (TFO) involve operating an airborne imaging system, including communicating with those who are using the images to assist with ongoing police activity. In order to become RPA pilots, TFOs must have received training to fly an RPA and have obtained their pilot certificate for small RPA advanced operations.
Task saturation is the point at which the number of tasks required of a person exceeds that person’s capacity to perform them to an acceptable standard; he or she is unable to accept additional tasks, and may have tunnel vision, causing him or her to focus only on one specific task to the exclusion of others.
RPA pilots at YRP are required to perform all of the TFO functions in addition to piloting an RPA. In this occurrence, this combination resulted in a situation in which the RPA pilot was managing a number of different communications, such as the police radio, a VHF radio for airplane broadcasts, and questions from YRP members. In addition, he was also controlling and monitoring the position of the RPA on the first-person view device and ensuring the camera was capturing the required footage. Performing this number of tasks simultaneously can lead to task saturation in many instances and likely affected the RPA pilot’s ability to process information.
Findings as to causes and contributing factors
The RPA pilot was tasked with operating the camera system, monitoring the status of the RPA, and communicating on multiple channels. As a result, he likely became task saturated, restricting his ability to visually monitor the RPA and hear radio calls on the control zone’s MF and the sound of incoming aircraft, both of which preceded the collision.
In the moments leading up to the collision, the pilot of the RPA likely was task saturated, the visual observer was unaware of the requirement to maintain VLOS, and the Cessna pilots’ active scan was unsuccessful; consequently, the conflict went unrecognized and the 2 aircraft collided.
3.0 Findings
3.1 Findings as to causes and contributing factors
These are conditions, acts or safety deficiencies that were found to have caused or contributed to this occurrence.
- The flight crew of the Cessna 172N was unaware of the presence of airborne remotely piloted aircraft traffic in the vicinity and, due to several factors, the active scanning that is part of the see-and-avoid principle was unsuccessful in identifying the conflict.
- York Regional Police policy does not require that visual observers be trained crew members, and the remotely piloted aircraft pilot did not brief the visual observer on his role and responsibilities before the operation. As a result, the visual observer was not aware of the requirement to maintain visual line-of-sight with the remotely piloted aircraft, nor was he trained in visual scanning techniques or aircraft identification.
- The remotely piloted aircraft pilot was tasked with operating the camera system, monitoring the status of the remotely piloted aircraft, and communicating on multiple channels. As a result, he likely became task saturated, restricting his ability to visually monitor the remotely piloted aircraft and hear radio calls on the control zone’s mandatory frequency and the sound of incoming aircraft, both of which preceded the collision.
- In the moments leading up to the collision, the pilot of the remotely piloted aircraft likely was task saturated, the visual observer was unaware of the requirement to maintain visual line-of-sight, and the Cessna pilots’ active scan was unsuccessful; consequently, the conflict went unrecognized and the 2 aircraft collided.
3.2 Findings as to risk
These are conditions, unsafe acts or safety deficiencies that were found not to be a factor in this occurrence but could have adverse consequences in future occurrences.
- If pilots do not consult established checklists before and during flight operations, there is a risk that checklist items deemed critical to the safety of the flight will be omitted.
- If remotely piloted aircraft operators who plan to operate in controlled airspace do not communicate their flight intentions with, and receive authorization from, the air traffic services provider, there is an increased risk of conflict or collision with another aircraft.
4.0 Safety action
4.1 Safety action taken
4.1.1 York Regional Police
The York Regional Police has amended its Command Directive LE-388 to include the addition of a pre-flight risk assessment tool and an updated Remotely Piloted Aircraft Pilot Checklist. There is also additional guidance for the role of visual observer, including a quick reference card outlining their roles and responsibilities, as well as a requirement to have a visual observer present for all operational remotely piloted aircraft flights.
This report concludes the Transportation Safety Board of Canada’s investigation into this occurrence. The Board authorized the release of this report on . It was officially released on .
Appendices
Appendix A – Example of DJI’s GEO system showing Buttonville Airport and restricted zones on map
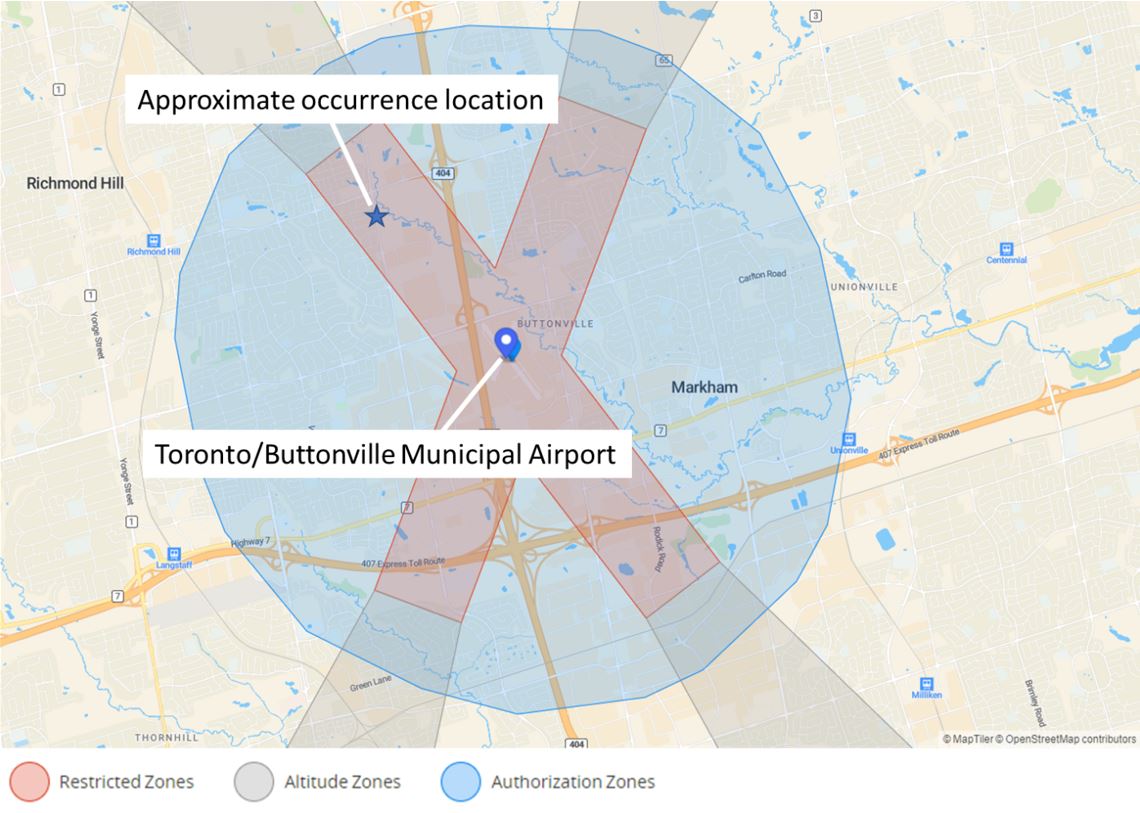
Source: DJI, Fly Safe Geo Zone Map, with TSB annotations.