Striking
supply vessel Maersk Detector and mobile offshore drilling unit GSF Grand Banks
Grand Banks of Newfoundland
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content. Masculine pronouns and position titles may be used to signify all genders to comply with the Canadian Transportation Accident Investigation and Safety Board Act (S.C. 1989, c. 3).
Summary
On the afternoon of 24 November 2011, the offshore supply vessel Maersk Detector was using dynamic positioning while loading cargo from the mobile offshore drilling unit GSF Grand Banks in the White Rose oil field. Weather was deteriorating at the time, with increasing swells arriving from the south. The vessel did not maintain position and, at 1530:39 Newfoundland and Labrador Standard Time, the port stern of the Maersk Detector struck the port aft intermediate column of the GSF Grand Banks, holing both the vessel and the rig. No injuries or pollution resulted from this occurrence.
Factual information
Particulars of the vessels
| Names of vessels | Maersk Detector | GSF Grand Banks |
|---|---|---|
| Registry/licence number | 828347 | 8752415 |
| Port of registry | St. John’s, Newfoundland and Labrador | Port Vila, Vanuatu |
| Flag | Canada | Vanuatu |
| Type | Offshore Supply Vessel/ Anchor-Handling Tug | Aker H-3.2 semi-submersible mobile offshore drilling unit (MODU) |
| Gross tonnage | 5470 | 15 923 |
| LengthFootnote 1 | 89.3 m | 77.13 m |
| Draught | Forward: 6.50 m Aft: 6.90 m |
Forward port: 20.19 m Forward starboard: 20.09 m Aft port: 20.13 m Aft starboard: 20.01 m |
| Built | Asenav - Astilleros y Servicios Navales S.A., Santiago, Chile in 2006 | Saint John Shipbuilding and Drydock Co. Ltd., Saint John, New Brunswick in 1984 |
| Propulsion | 4 MaK diesel engines, (total power 13 440 kW), 2 controllable‑pitch propellers, 4 thrusters | 4 Bergen diesel electric engines, (total power 7596 kW) driving two 1500 kW azimuth thrusters |
| Cargo | 126 tonnes of oil rig equipment | 3117 tonnes of oil drilling equipment |
| Crew | 15 | 90 |
| Registered owners | Maersk Supply Service Canada Ltd., St. John’s, NL | Global SantaFe Overseas Ltd, Bahamas |
Description of the vessels
Maersk Detector
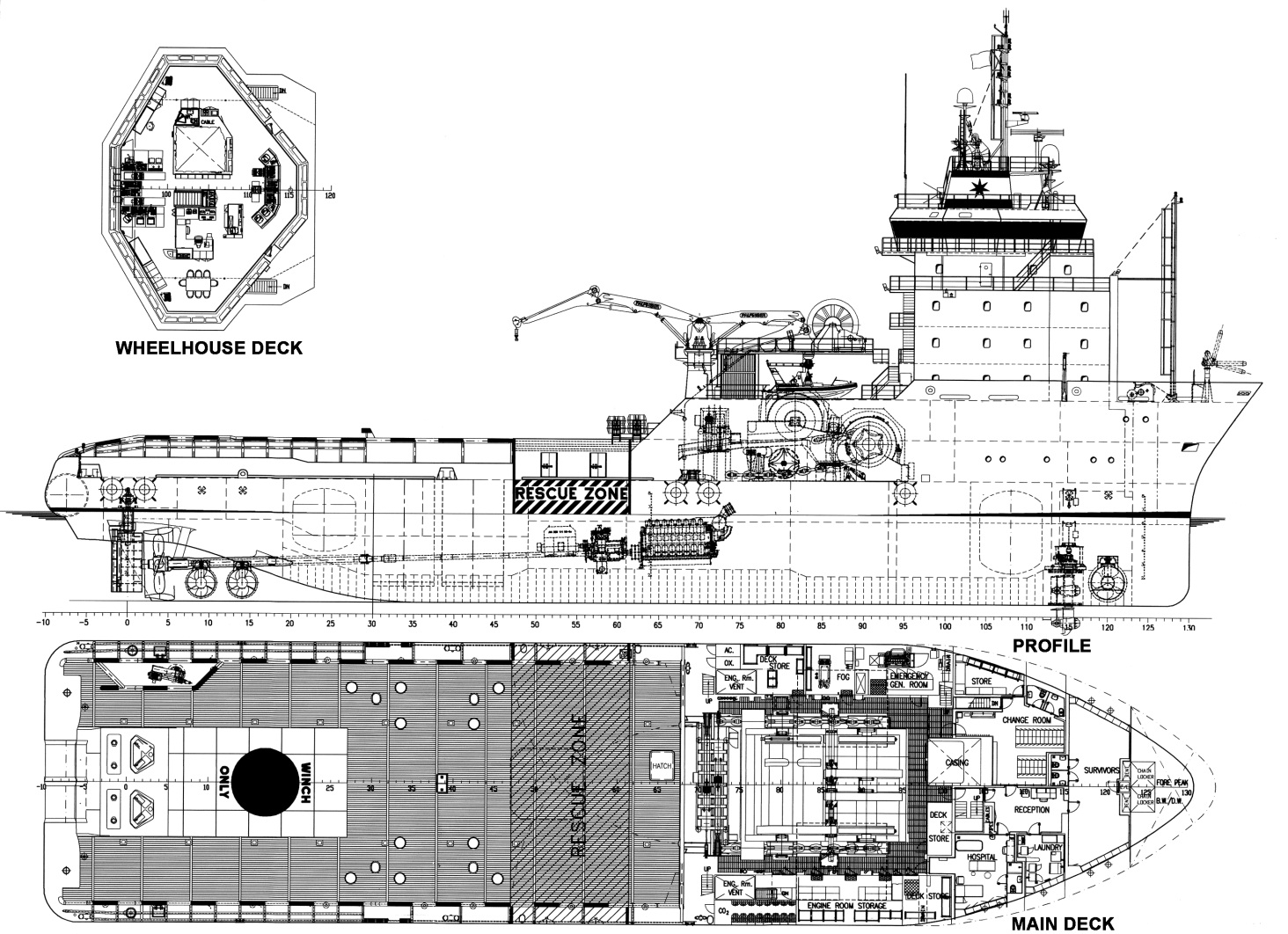
The Maersk Detector is a supply vessel/anchor handling tug, classed as an offshore supply vessel and fitted with a Kongsberg SDP 21 dynamic positioning (DP) system. The vessel is fitted with 4 main propulsion engines driving 2 controllable pitch propellers. Each propeller is connected to an outer engine of 3840 kilowatt (kW) rating and an inner engine of 2880 kW rating at 600 revolutions per minute (rpm). When DP is active, the engines run at a constant rpm.

The thruster configuration consists of 4 units: at the bow there is a tunnel thruster and retractable azimuth thruster, each with an 883 kW motor, while at the stern there are 2 tunnel thrusters, each with 700 kW motors. All thrusters are driven by controllable-pitch propellers powered by electric alternating current (AC) motors with a constant speed. The vessel is also fitted with 2 independent Becker rudders.Footnote 2 For a general arrangement of the vessel, refer to Appendix A.
Dynamic positioning system
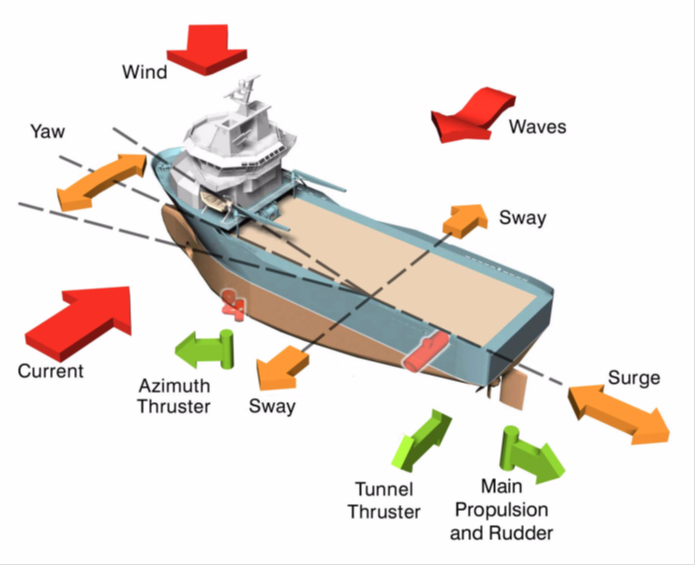
A seagoing vessel is subject to forces from wind, waves, and current, as well as those generated by the vessel's propulsion system. The vessel's response to these forces (changes in position, heading, and speed) is measured by the DP's position-reference systems, gyrocompass, and vertical reference sensors. Reference system readings are corrected for roll and pitch using readings from the vertical reference sensors. Wind speed and direction are measured by the wind sensors. Using this data, the DP control system calculates the forces that the thrusters must produceFootnote 3 in order to control the vessel's surge, sway, and yaw within 3 horizontal degrees of freedom relative to the setpoints for heading and position that are inputted by the DP operator (DPO) (Figure 1).Footnote 4
The DP system on the Maersk Detector was designed to comply with the requirements of the classification society, Lloyd's Register,Footnote 6 as well as the International Maritime Organization (IMO) standardsFootnote 7 for Class 2Footnote 8 DP systems. The system includes the following sensor/input components: 3 gyrocompasses, 2 motion reference units, 2 wind sensors, 2 differential global positioning systems (DGPS), 1 relative positioning laser radar system, and 1 high precision acoustic positioning system.
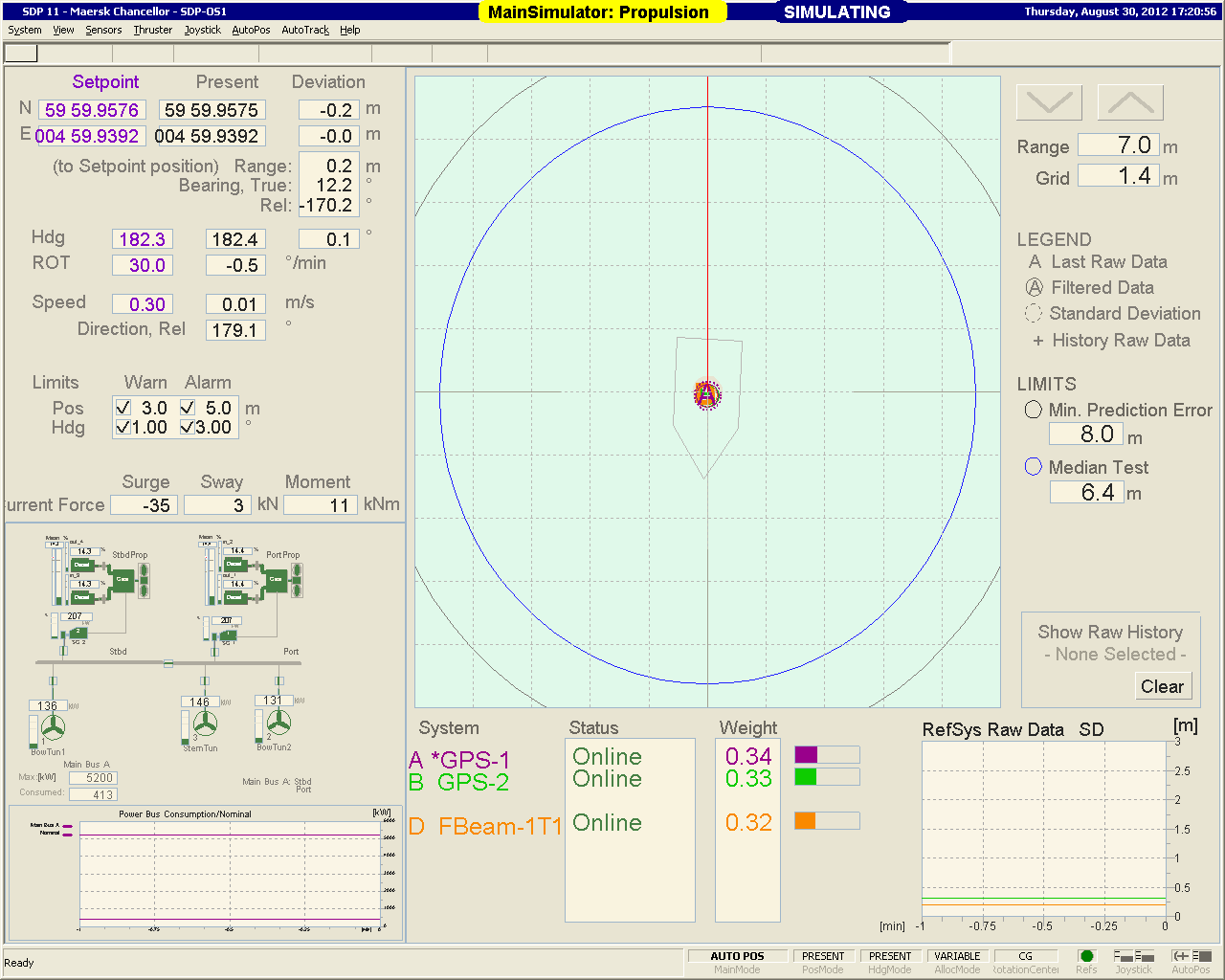
The main propellers, rudders, and thrusters can be controlled from manoeuvring panels in the forward and aft bridge control areas. In the aft bridge area, there are 2 identical DP operation consoles (Figure 2) that each allow the vessel to be controlled in several different modes via computer software. The DP modes available include the following:

- Standby mode: a waiting and reset mode in which the system is in a high state of readiness, but no vessel control commands can be made.
- Joystick mode: a mode in which the operator controls the movement and speed of the vessel using the three-axis joystick.
- Combined Joystick/Auto mode: a mode in which the operator can select either 1 or 2 of the surge, sway, and yaw axes for automatic control of position and speed, while retaining manual control of the remaining axis.
- Auto Position mode: a mode in which the system automatically maintains the heading and position of the vessel (all 3 axes). The user inputs the initial desired position setpoint and maximum speed to use when manoeuvring to the setpoint. Once the desired setpoint has been reached, the DP system controls the thrusters to maintain that setpoint position.
There are 20 DP console display views of positioning, mechanical, and power management data that provide the DPO with real-time values and trends to assist them in maintaining full control of the DP system and ensuring that the vessel setpoint is safely maintained. For examples of the display views available on the Maersk Detector DP system, refer to Appendix B. Using these views, operators can derive information such as the following:
- The real-time plotting of the vessel's position in relation to the selected setpoint;
- Information about the performance of the reference systems;
- Detailed information about out-of-position alarms and/or heading alarms;
- Trends showing the average, minimum, maximum, and standard deviation history over a specified period for selected information, such as wind, sea current, position and heading deviation, thruster forces, and power consumption; and
- Information about the power management of the vessel's thrusters.
GSF Grand Banks
The GSF Grand Banks commenced operations off the East Coast of Canada in 1984. It operated under several different names in various locations around the world until 2003, when it returned to the Grand Banks area. It is a rectangular, twin-hulled, column-stabilized, non-self-propelled mobile offshore drilling unit (MODU) or, more commonly, a rig. The rig has 4 corner stability columns of 9.0 m in diameter as well as 4 intermediate stability columns of 7.4 m in diameter rising from 2 hulls to support the main deck. The deck is arranged with the drilling mast in the centre and modules housing the living quarters, equipment, storage area, and workshops on the perimeters.

Crane operations
On the GSF Grand Banks, the port crane is mainly used for general cargo transfers. This type of cargo is usually stowed on the port side of the rig, as the starboard deck area contains the drill test packages and, as such, is limited in space.
The rig port crane operating limits are 45 knots wind or 4 m significant waves.Footnote 10 The crane operator has an anemometer readout for wind speed in the crane cab and periodically calls the rig ballast control room (BCR) for wave heights. Earlier on the day of the occurrence, the deck foreman had called the BCR for wave heights and was aware that the significant wave height (Hs)Footnote 11 was 3.2 to 3.6 m.
The port crane can boom down to a maximum reach of 44.9 m but is usually at a set limit of 39 m reach, which ensures at least 5 m reach is available to chase the vessel with the crane hook, if needed. The crane is also fitted with a main/auxiliary winch emergency load release which, when activated, allows both the main and the auxiliary winches to go into an uncontrolled free-fall, releasing the load.
The starboard crane cannot reach most of the cargo stowed on the port side. As a result, the cargo must be moved within reach of the starboard crane using the port crane. This means that 2 crane lifts are required (1 with each crane) for each lift of cargo when loading a vessel on the starboard side. For this reason, the starboard side is only used when the port side is unavailable and the cargo is critical for the continuity of the drilling operation.
History of the voyage
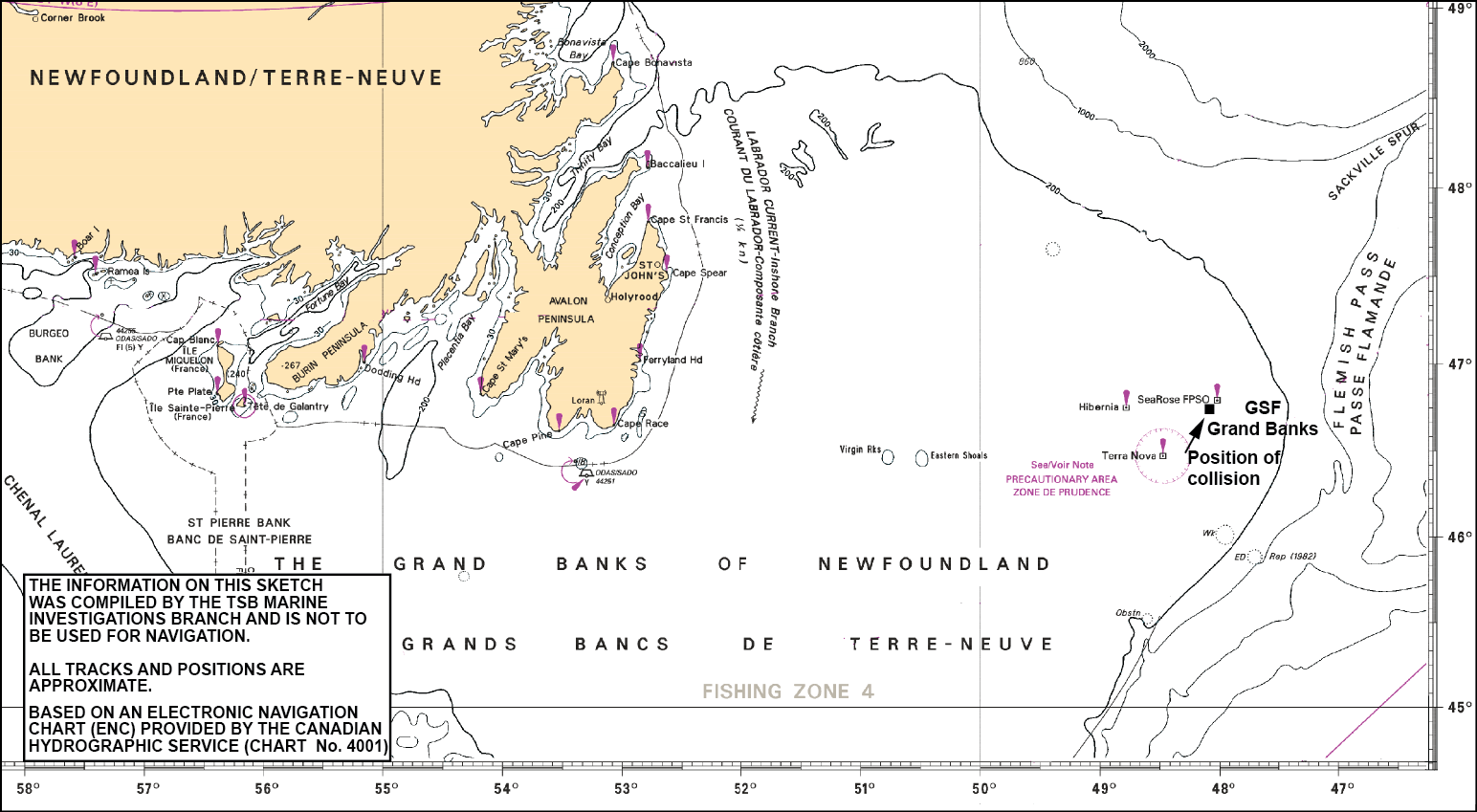
On 14 November 2011, the Maersk Detector departed St. John's, NL and proceeded to the GSF Grand Banks, which was moored on 8 anchors and engaged in drilling operations on the Grand Banks of Newfoundland at the White Rose oil field operated by Husky Oil Operations Limited, (Appendix C). The Maersk Detector arrived at the field on 15 November to provide standby and supply vessel services.
At approximately 0615Footnote 12 on 24 November, the first officer safety (FOS),Footnote 13 who was on watch, advised the master that they had received a request to proceed alongside the GSF Grand Banks to load synthetic base mud and deck cargo (containers and pipe). The FOS then completed the DP checklists and prepared for the cargo operation.
During the daily morning meeting on board the GSF Grand Banks at 0630, the rig supervisors discussed ongoing and planned operations for that day. During the routine oil field operators meeting at 0700, Husky representatives, rig supervisors, and the weather observer reviewed the ongoing and planned drilling/marine operations and discussed the weather forecasts and present weather conditions. The planned cargo operation was considered routine.
On the Maersk Detector, at about 0700, the master came onto the bridge. The vessel's request to enter the 500 m safety zoneFootnote 14 was approved by the BCR and at approximately 0736, the vessel entered the 500 m safety zone. About 10 minutes later, the vessel's DP Auto Position mode was activated.
At 0806, the vessel was stationed on the lee sideFootnote 15 of the rig on an easterly heading with its port side positioned to the port side of the rig to load the mud and cargo. These operations continued until approximately 1150, when the vessel moved outside the 500 m safety zone to allow the Maersk Chancellor, another supply vessel arriving on site, to go alongside the rig and offload its cargo.
At 1200, the first officer navigation (FON) took over the bridge watch. The FON then completed the appropriate checklist and assumed the role of DPO while the vessel was at the outside edge of the 500 m safety zone waiting for the Maersk Chancellor to complete its operation.
At about 1250, the FON completed the appropriate checklist, switched from DP Auto Position to DP Joystick mode and re-entered the safety zone as the Maersk Chancellor exited. At approximately 1300, when 100 m from the rig, the DP was changed to Auto Position mode and the FON used position/heading change inputs to move closer to the rig.
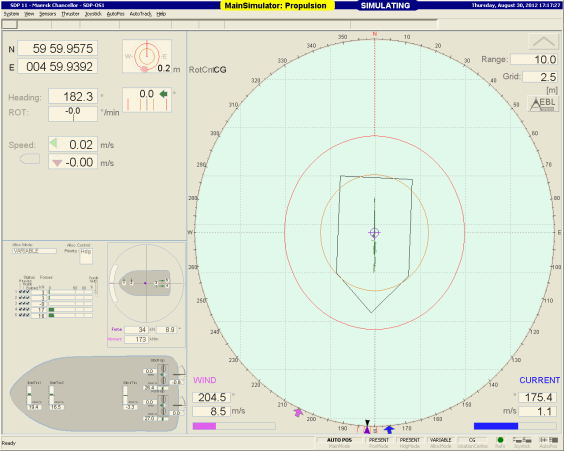
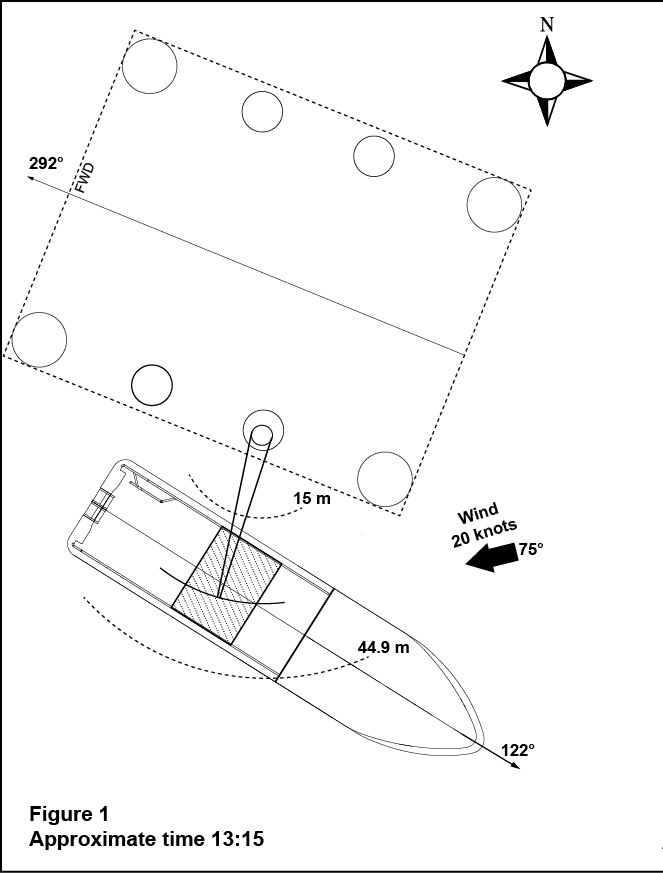
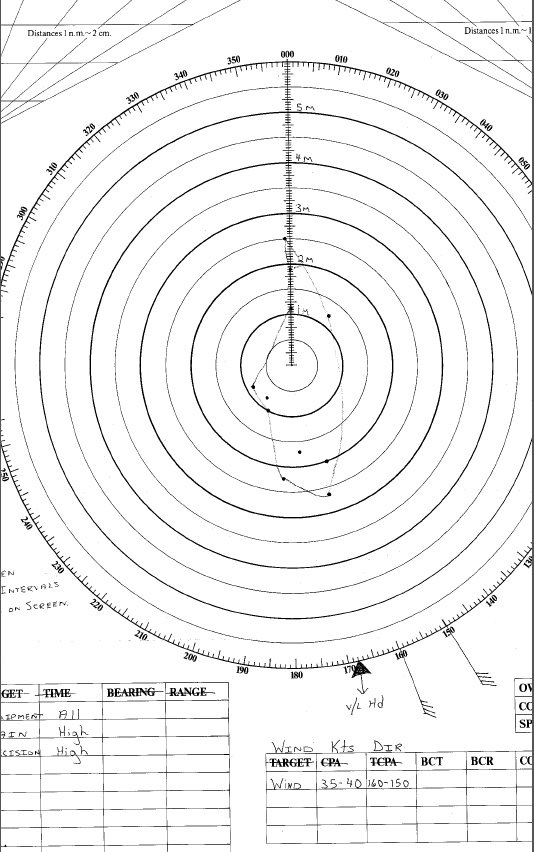
At about 1315, the Maersk Detector was about 15 m off the lee side of the rig on a heading of 122°true (T) (Appendix D, Figure 1) and around 1330 commenced loading containers on deck. Between 1330 and 1400 the wind shifted from a northerly to the southeasterly direction, with the rig port side changing accordingly from lee side to weather side.Footnote 16 There was no formal briefing or risk assessment conducted for this weather-side operation.
During the cargo operation, the wind and sea state veered, and was now coming more from the south. The master discussed the weather situation with the deck foreman, who was operating the port rig crane, and they agreed to stop operations when conditions became unsuitable.Footnote 17 Minor changes of heading were made to keep the wind on the port bow of the vessel as it moved from a lee side to a weather side condition.
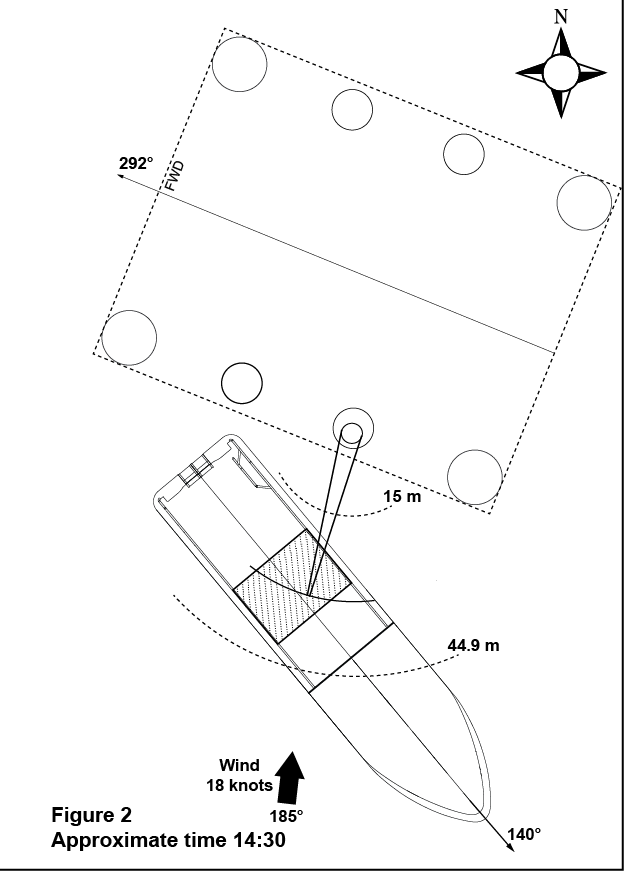
At approximately 1400, the relative positioning laser radar system was added as a third position reference for the DP system by the crew. By 1430, the vessel's heading had been changed to 140°T and the wind was about 45°off the starboard bow as loading operations continued (Appendix D, Figure 2). Around 1445, the master completed the appropriate checklist and took over the DP operations from the FON. The FON remained on the bridge as officer of the watch (OOW), watching the cargo operation and making relevant log entries from a position next to the master. The master then did a capability analysisFootnote 18 using the current wind conditions and an input of 5 m Hs. The results indicated that the vessel could maintain position, using DP Auto Position mode, on any heading. The FON moved to the port aft chair and took charge of the loading operation using channel 6 very high frequency (VHF) and ultra high frequency (UHF) radiotelephones to communicate with the rig and deck crew as necessary.
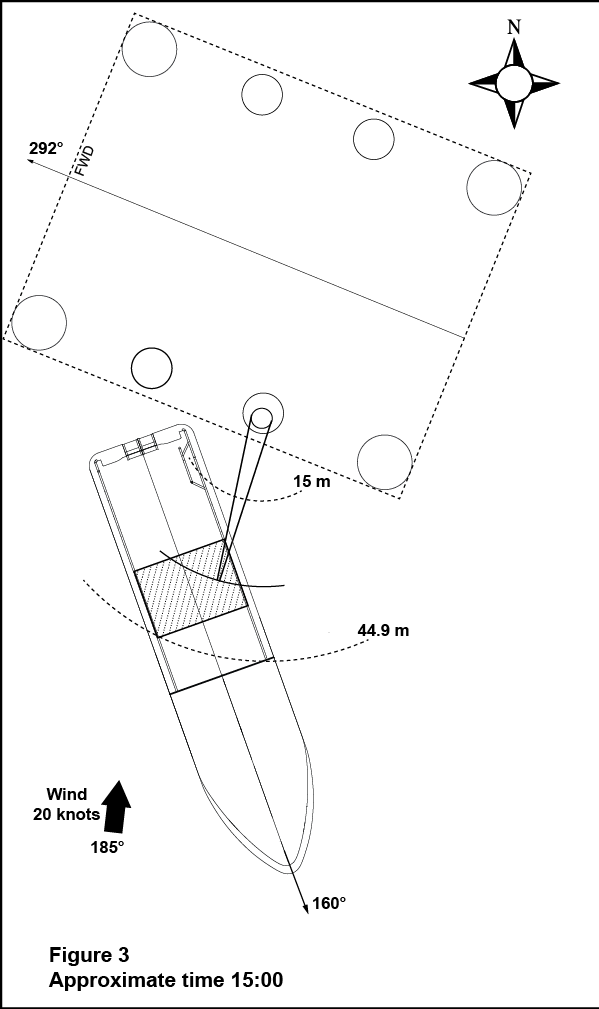
By 1500, the vessel's heading had been changed to 160°T, putting the wind at around 25° off the starboard bow (Appendix D, Figure 3). The master contacted the BCR, using channel 6 VHF radiotelephone, to obtain the sea state information. The master was informed that the Hs was 3.5 m.
At about 1510, the driller in the break room on the rig observed the vessel through a window and notified the offshore installation manager (OIM)Footnote 19 that the Maersk Detector appeared to be too close to the rig. The OIM called the barge supervisorFootnote 20 who then went to check the vessel's position. The barge supervisor then spoke to the crane operator and was informed that the vessel appeared to be maintaining a safe distance. The barge supervisor remained on deck to observe the vessel for about 10 minutes. He then relieved the ballast control operator (BCO) in the BCR to take a break and notified the OIM that the vessel's position was appropriate. The OIM relayed this information to the driller.
At approximately 1510, the Husky Logistics representative, who was on the rig, called the master to discuss the weather conditions and advised him that the Hs was 3.5 m. The wind speeds at that time were around 20 knots and the seas were getting larger. They concluded that the operation could be terminated at any time by the master if warranted by the weather conditions.
At 1522, the last container was loaded onto the vessel and pipe was to be loaded next. The master inputted the change position and heading commands to move the vessel off the rig, and then altered the heading by 20° to starboard to better load the pipe on the stern. At about 1524, the heading was approximately 180° and more directly into the swell (Appendix D, Figure 4). The master changed the bow thruster azimuth setting from fixed abeam (90° relative) to variable stabilizing.
For the next 6 minutes, the master continued as DPO. As the vessel pitched and heaved from an increasing southerly swell, the master was focused on looking out the aft window to judge the distance from the stern to the rig. The FON, the only other person on the bridge, continued to watch the crew on deck and make log entries. The master then used channel 6 VHF radiotelephone to advise the deck foreman, who was operating the crane, that the vessel was in position and ready to be loaded.
At about 1529, the crane was swinging the first lift of pipe over the vessel. At that time, there was a distance of about 15 m between the port stern of the vessel and the port aft intermediate column of the rig. Shortly after, while experiencing the next 5 swells, the vessel began to move astern at an average speed of about 0.4 m/s. During the fourth swell, the master attempted to increase the vessel's distance from the rig by entering a 4 m "change position" command using the DP console. However, the vessel continued to approach the rig column. At 1530:39, the vessel struck the rig, breaching the port aft intermediate rig column and the vessel's port stern aft peak tank.
At that time, a shudder was felt on the rig; closed circuit television (CCTV) monitors were checked, but there was no indication of what caused the shudder. The barge supervisor called the crane operator and was informed that the vessel had struck the rig. The barge supervisor then called the vessel and was told to standby. A minute or so later, the vessel advised it had struck the rig above the waterline; a second call followed shortly after to advise that both the rig and vessel were holed. The barge supervisor advised the OIM and then began supervising the damage control team. The BCO was requested to deballast the rig from a draft of 22 m to 19 m to stop the ingress of water into the breached column. The vessel immediately moved off the rig about 15 to 20 m, and the crew disconnected the pipe slings from the crane hook. At about 1539, the Maersk Detector proceeded to the south of the rig and changed from DP to manual bridge control.
DP proving trials
On the 04 and 05 December, a DP proving trial of the Maersk Detector was conducted in the waters off St. John's, NL. This trial was performed to test the redundant capability of the system by simulating the failure(s) of various components and to prove that the DP system was fully functional and well maintained. The reports of this trial show that the Maersk Detector's DP system met all relevant criteria and there were no indications of any problems or issues with the system that may have affected the station-keeping of the vessel.
Damage to the vessels
The Maersk Detector was holed on the port stern, and 3 frames buckled in the number 23 ballast tank (Photos 3 and 4), resulting in the release of fresh drill water into the ocean.
The GSF Grand Banks was holed in an empty void tank on the port aft intermediate column just below the 27 m watertight flat in way of the aft end of the fendering system (Photo 5). The rig was deballasted about 3 m in draft to stop the ingress of water. The tank was about 11.25 m in depth and was filled to about 0.4 m prior to deballasting.



Crew certification and experience
The master and navigating officers all held the required certificates of competency for their positions. The master held a Master Mariner certificate of competency, was formally trained in DP operation and held an unlimited DP operator (DPO) certificate issued by the Nautical Institute based in the United Kingdom. He had 26 years of experience on supply vessels, with 10 of those years as a master. He served as master on the Maersk Detector for 4 years; for 2 of those years, he acted as senior DPO when required.
The FON held a Watchkeeping Mate certificate of competency. He was also formally trained in DP operation and held an unlimited DPO certificate issued by the Nautical Institute based in the United Kingdom. He had 4 years of experience as first officer with Maersk, including 2 years on the Maersk Detector. For 1 of these years he acted as a junior DPO when required.
Vessel certification
The vessel was crewed and equipped in accordance with existing regulations and held valid certificates issued by Lloyd's Register on behalf of Transport Canada (TC).
Environmental conditions
Weather forecast
The marine weather forecasts were issued by a shore-based company to the rig and the supply vessels. The forecasts issued at 0600 and 1200 indicated that the Hs would increase throughout the day, reaching a measurement of 3.3 m at 1430 and 4.9 m at 2030. The forecasts also predicted 10 m mean wind speedsFootnote 23 of 32 knots at 1430 and 21 knots at 2030, with the wind direction at 1430 coming from the south (180°) and shifting to the southwest (220°) at 2030.
Weather measurements
There is a directional waverider buoy positioned 2.83 nautical miles (nm) north-northeast from the GSF Grand Banks that provides wave measurements. Raw wave data is transmitted about every 1.6 seconds from the buoy to the wave data receiving station located on the bridge of the rig. The rig and the vessel also both use anemometers to monitor and record wind speed and direction.
According to the data, between 1430 and 1500, the wind direction shifted from about 192 to 202°, with the wind speed increasing to 20 knots. Between 1500 and 1530, the wind direction varied from about 200 and 205°, with the wind speed varying between approximately 18 to 24 knots. From 1500 to 1600, the wave period is estimated to be approximately 8 secondsFootnote 24 and the 3 highest wave heights recorded at the waverider buoy were 9.47 m at 1507, 8.72 m at 1544 and 9.62 m at 1546 (Figure 3).
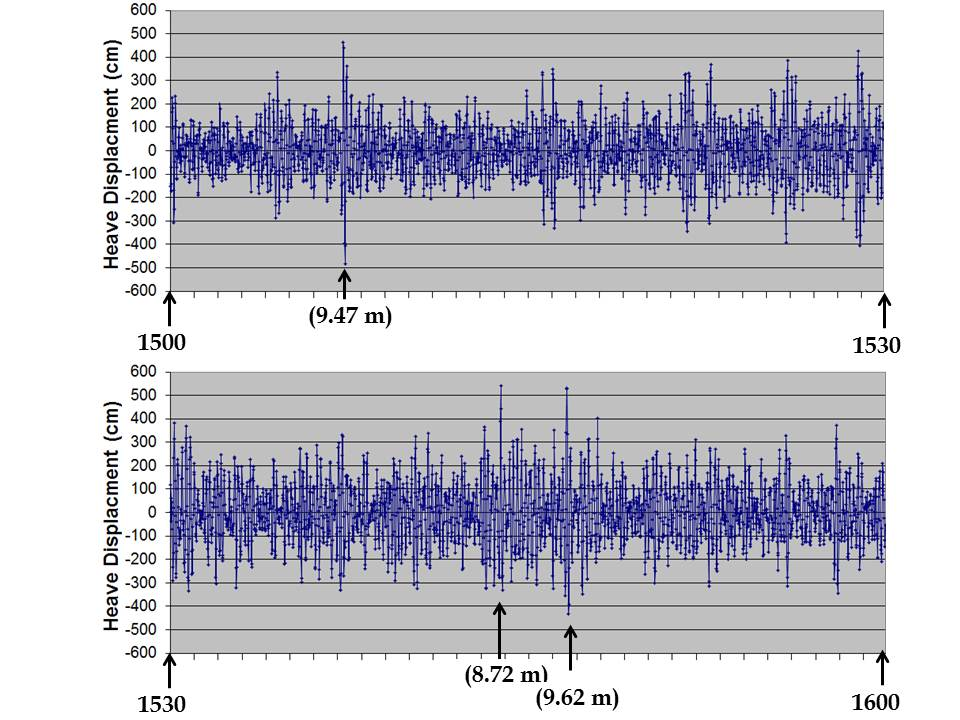
As the waves were coming from the south, the waverider buoy recorded the wave heights after they had been experienced at the rig. The travel time of a wave with an 8-second period from the rig to the waverider buoy is approximately 14 minutes.Footnote 26 If the waves maintained their characteristics throughout, then the measurement of the waves at the buoy would be indicative of the waves experienced at the rig 14 minutes earlier. The wave heights of 8.72 m and 9.62 m were measured at the waverider buoy 14 and 16 minutes after the striking occurred. It is therefore possible that one or more similar waves were experienced by the vessel immediately before it struck the rig.
Compilation and communication of environmental information
The raw data received from the waverider buoy is automatically compiled at the weather station on the rig, which is operated by 1 weather/ice observer. In the weather station, the wave viewer displays the Hs and the Hmax.Footnote 27 The Hs is updated every 200 seconds, while the Hmax is updated every 30 minutes on the hour and half hour. On the day of the occurrence, the waveviewer displayed the following Hs and Hmax at the indicated times:
| Time of compilation | 1359 | 1429 | 1459 | 1529 |
|---|---|---|---|---|
| Hs(m) | 3.16 | 3.51 | 4.14 | 4.50 |
| Hmax(m) | 4.71 | 6.53 | 6.57 | 9.47 |
The weather station operator prepares and then emails meteorological reports (METAR) every hour at the half hour to recipients that include the Husky environmental department, Husky Logistics coordinator on the rig, and Husky Logistics office in St. John's, as well as the rig BCR and Cougar Helicopters. The METAR sent out by the operator around the time of the occurrence are provided in Table 2. The operator typically prepares the METAR ahead of the scheduled transmission time. When viewing both tables, note that at 1429 and 1529/1526 there is a smaller discrepancy between the Hs values than there is between the Hmax values. This difference is due to the fact that the Hs is updated more frequently than the Hmax.
| METAR transmission time | 1331 | 1429 | 1526 |
|---|---|---|---|
| Hs(m) | 2.8 | 3.4 | 4.4 |
| Hmax(m) | 4.0 | 4.7 | 6.6 |
Weather information is also available on the rig via the mooring advisory system (MAS) computers in various locations including the BCR, OIM office, Husky office, and on the bridge. The MAS receives the weather data from the rig weather station and updates the Hs every 30 minutes. When the BCO receives a request for the sea state, the reading can be taken from the MAS display. On the day of the occurrence, the MAS display in the BCR indicated the following Hs values:
| Time on MAS display in BCR | 1438 | 1508 | 1538 |
|---|---|---|---|
| Hs(m) | 3.5 | 4.15 | 4.5 |
Helicopters are restricted from landing on the GSF Grand Banks when the Hs reaches 6 m. At that height, in the event of a helicopter emergency ditching, it becomes difficult for Fast Rescue Craft (FRC) to rescue personnel in the water. As such, the operator of the weather station must notify Cougar Helicopters' dispatch in St. John's when the Hs reaches 6 m. There is no similar procedure when a weather limit for cargo operations is reached.
Voyage data
Voyage data recorder
Various modes of transportation use the data from voice and data recorders to support an investigation into an accident or incident. In addition to bridge audio, a voyage data recorder (VDR) is designed to record such parameters as date and time; vessel heading, position and speed; VHF radiotelephone communications; radar images; engine and thruster orders and responses; and wind speed and direction measurements.
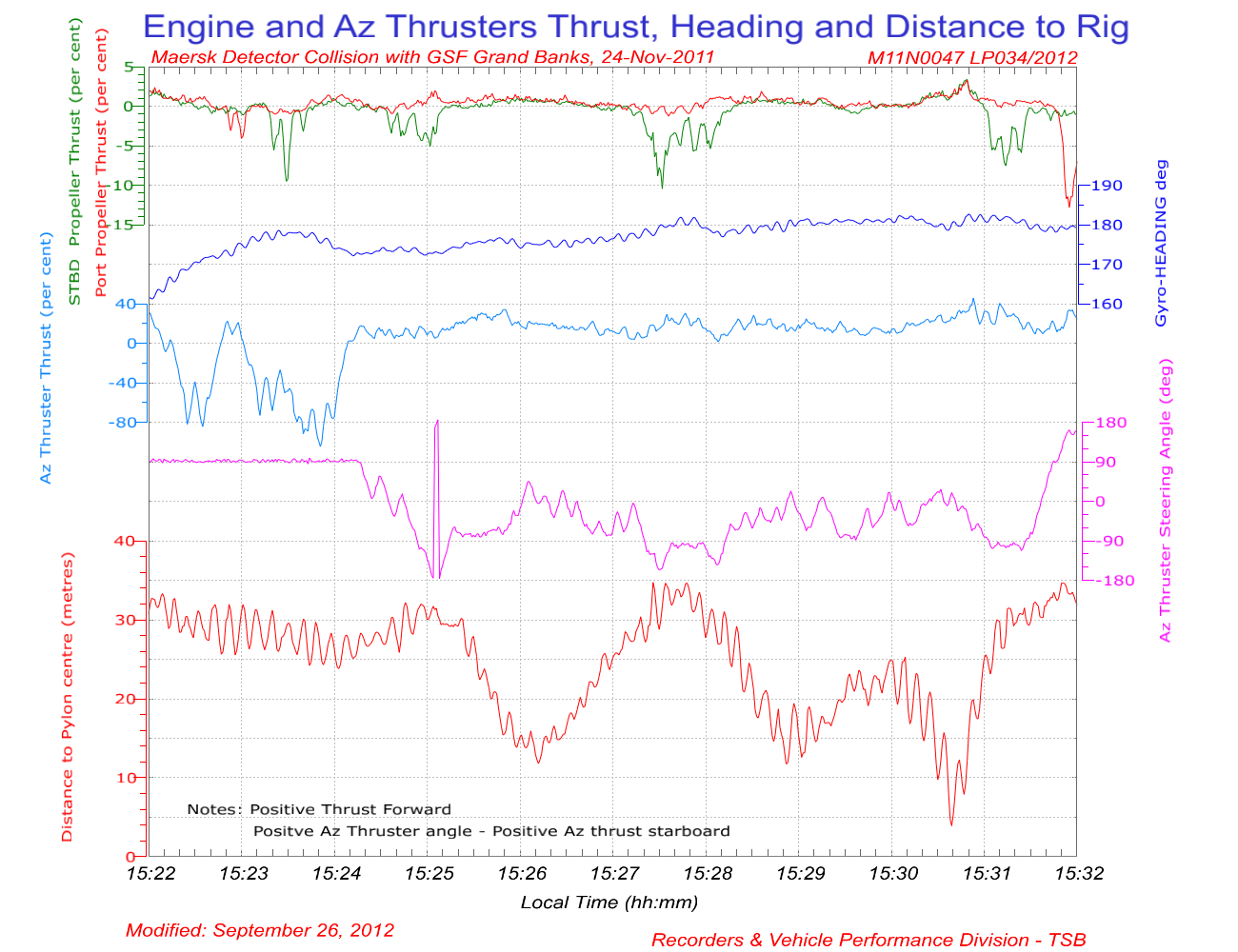
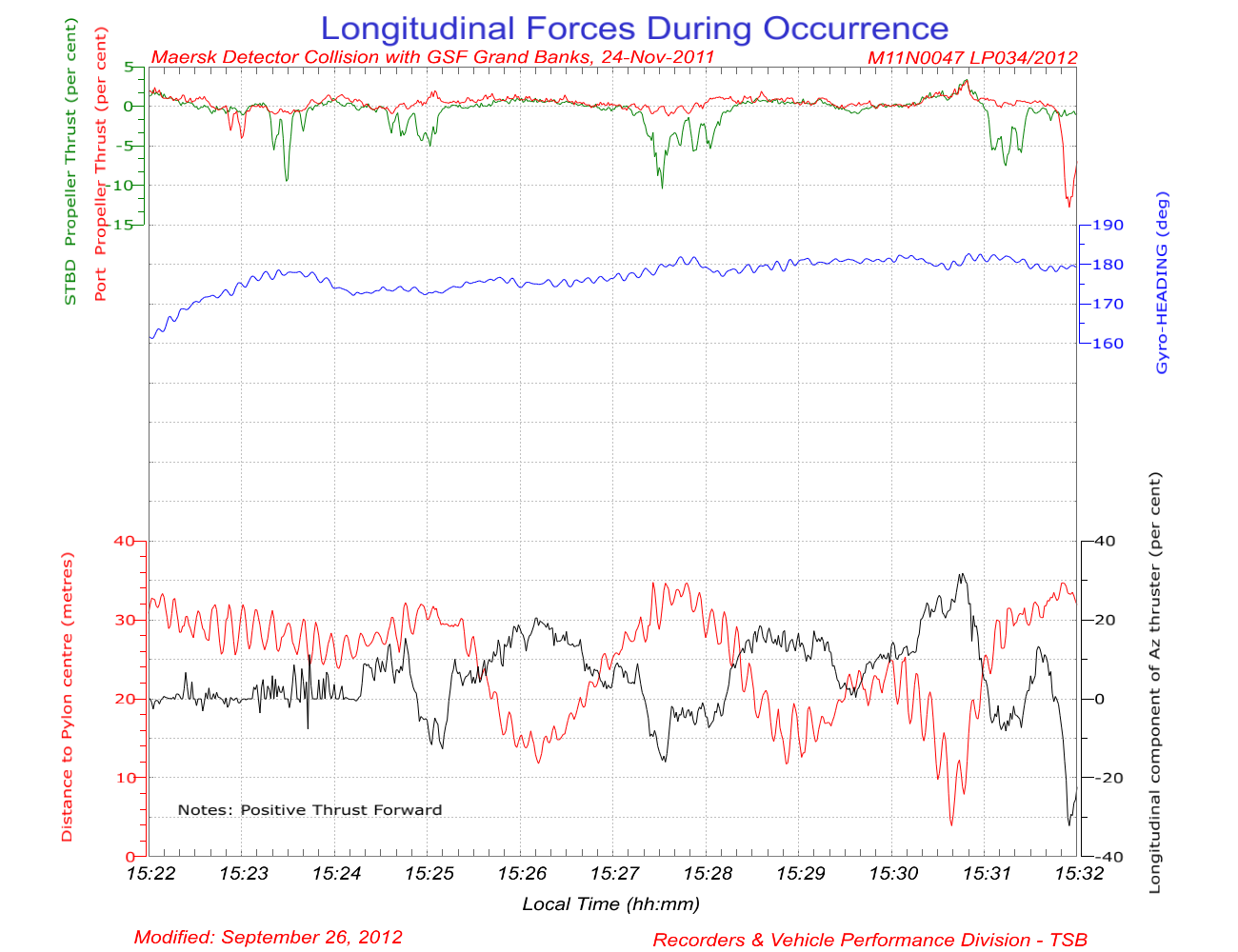
The Maersk Detector was equipped with a VDR, although one is not required for the voyage undertaken. Following the occurrence, VDR data from the Maersk Detector was recovered by TSB investigators. The charts in Appendix E and F present some of the data pertinent to the investigation that was retrieved and interpreted for a 10-minute time period leading up to and including the striking.Footnote 28 Review of this data indicated the following:
- At around 1524, the thrust output of the azimuth thruster stabilized significantly; at the same time, the steering parameter began to fluctuate. This is consistent with the master switching the azimuth control from fixed to variable steering.
- Once adjusted for the motion of the GSF Grand Banks, the data for distance between the stern of the Maersk Detector and the centre of the rig's port aft intermediate column ('distance to pylon centre' on the chart) exhibited high-frequency oscillations with a period of about 8 seconds. This was because the position data recorded by the VDR included the movement of the GPS antennae and therefore reflects the motion of the vessel about its own axis (primarily pitching in waves) as well as the increase and decrease in the vessel's distance from the rig.
- The data for the 6.5 minutes prior to the striking also exhibited a low frequency oscillation that reflected the movement of the vessel towards and away from the rig during this time.
- Between approximately 1529:30 and 1530:00 (30 seconds), the distance between the rig and the vessel appeared to stabilize, after which it began to steadily decrease while experiencing 4 complete high-frequency oscillations, primarily due to pitching in waves. It reached a minimum at approximately 15:30:39, the time of the striking.
- At approximately 1530:16, after the vessel began its final movement towards the rig, the data for thrust produced by both the main engines and the azimuth thruster increased sharply. This thrust acted to propel the vessel away from the rig and reached a value of less than 5 percent of maximum for each main propeller and less than 40 percent of maximum for the azimuth.
- At approximately 1530:35, there was a brief interruption, or dip, in the forward thrust after which it increased sharply again, reaching a peak value of less than 5 percent for each main propeller and just over 40 percent for the azimuth.
- The VDR data for the longitudinal thrust components and distance from the vessel to the rig are 180° out of phase with each other.
When the data from the VDR was retrieved, the investigation found that the bridge audio data was corrupted and unusable due to a VDR software error. The manufacturer was already aware of this VDR software error, and on 21 June 2011 had issued a mandatory Technical Advisory Sheet No. 379, requiring that a software update be performed at the next annual performance test. On the Maersk Detector, this test was scheduled for December 2011.
Electronic chart display and information system
The Maersk Detector was fitted with an Electronic Chart Display and Information System (ECDIS). The ECDIS download was used to confirm the positioning data and timeline provided by the VDR data.
Dynamic positioning logger
The DP logger is a software tool used to record data related to the operation of the DP system and subsequently to retrieve, inspect, transform, and archive that data. In this occurrence, the logger was operational but not recording. The logger had been installed in May 2011 and had stopped recording data following a routine software reboot in July 2011, as it was not set to automatically restart after reboot. At the time the logger was installed, the crew was advised that the equipment would operate in the background with no operator input required. There was no manual for the DP logger on board.
Dynamic positioning panel log
When the DP system is operated, messages are sent from the operator panel to a panel driver that distributes them to the appropriate components of the DP system. The panel driver also receives messages from the DP system and sends them to the operator panel. In this occurrence, the Maersk Detector's DP system was configured to log the messages to and from the operator and the system, for example, the activation of buttons, changes in lamp status, use of the joystick, and use of the heading wheel. The DP manufacturer service personnel use this information to analyze problems with the DP system. Following the occurrence, the DP panel log was downloaded by a manufacturer's technician and sent to its head office for interpretation. The results returned to the TSB did not include data for the period of time of the occurrence. Panel log data for DP computers OS1 and KM-OS ended at 1425:18 and 1329:44 respectively. The manufacturer could not determine why data was not available around the time of the occurrence.
Dynamic positioning system warnings and alarms
Operational checks are continuously carried out during DP system operation. There are 3 categories for messages based on their severity: information, warnings, and alarms. Information messages inform on conditions that are noteworthy, but that have no serious effect on the performance of the system. Warnings are visual indicators only and provide information on conditions in the system that, if ignored, could result in unwanted system response or eventual failure (such as incorrect operator actions, intermittent position-reference data, or a defined warning limit that has been exceeded). Warnings continue until acknowledged by the operator. Audible and visual alarms are generated when conditions are detected that critically affect the capability or performance of the system (system fault or a defined alarm limit that has been exceeded). These alarms continue until acknowledged by the operator. Audible alarms, however, may be silenced independent of acknowledgment.
Warning and alarm limits for position and heading deviations can be set by the operator. When such an alarm or warning is activated, the position deviation indicated by the system is for the time the warning/alarm was issued; however, the actual deviation can increase after the alarm and this will not be indicated on the alarm printout. The DP operator could determine the maximum deviation by continuous monitoring of the appropriate view on the DP console and reviewing the historical trends view for the vessel's position. On the Maersk Detector, as a standard practice, the warning and alarm thresholds were set by the crew at 3 and 5 m respectively for position, and 3 and 5° respectively for heading.
There was also a warning displayed on the console when thrust exceeded 80% for 5 seconds on the main propellers or thrusters. This warning would be cancelled when the thrust stayed below 80% for 20 seconds.
Another scenario in which a warning may be activated is when the difference between the position data from the reference system(s) and the vessel position estimated by the DP software model exceeds a user-defined limit. This may be due to an error in the reference system or its interface to the DP system, or due to environmental disturbances (air/sea). When this happens, the "reference prediction error" warning is activated and the data from the reference system involved is rejected. The operator must then verify that the test rejected the correct reference system by analyzing the DP reference system's streamingFootnote 29 data and historical trend views. If the system rejects the wrong reference, the model might follow a failed reference position. In this occurrence, the limit was set at 5.7 m.
The warnings and alarms logged by the DP system on the Maersk Detector between 1315 and 1531 are summarized in the following table:
| Time period | Events | ||||||
|---|---|---|---|---|---|---|---|
| Scenario | Time | Alarms (Pos/Hdg) |
Warnings (Pos/Hdg) |
Warnings (Thruster) |
Warnings (Ref Prediction) |
TOTAL | Average frequency |
| Vessel operating on lee side of rig | 39 min (1315 to 1354) |
- | 9 | - | - | 9 | 1 event every 4.3 min |
| Wind shifts; vessel operating on weather side of rig | 88 min (1354 to 1522) |
10 | 59 | 4 | 2 | 75 | 1 event every 1.2 min |
| Final heading change to 180° | 6.58 min (1524 to 1530:35) |
2 | 5 | - | 2 | 9 | 1 event every 0.73 min |
After the striking, at 1533:27, the DP system logged an information message, "consequence analysis stopped." Consequence analysis is a function whereby the DP system continuously checks its redundancy.Footnote 30 For the Maersk Detector, a "consequence analysis stopped" message indicates that the system had been switched from full Auto Position mode to full or partial Joystick mode or that consequence analysis had been deactivated by the DP operator.
Husky offshore service vessel guidelines
Husky Oil Operations Limited manages and supports the White Rose oil field using the established logistics infrastructure and resources in St. John's, NL. The Maersk Detector had a copy of the Husky Offshore Service Vessel (OSV) guidelines on board at the time of the occurrence. The purpose of these guidelines is to give offshore service vessel owners, vessel masters, and crews guidance on Husky Atlantic Region OSV operations. The guidelines clearly state that the master of a vessel has the overriding authority to decide whether any operation affecting the safety and integrity of the vessel or the safety of the crew should proceed or be suspended.
The OSV guidelines indicate that the vessel's crew should obtain regular and frequent weather forecasts and use their experience to assess the prevailing conditions and probable trends. A weather-side operation is defined as a situation in which any combination of environmental forces, such as wind, waves, swell, wave drift, surface current, surge current, tidal current, as well as changes in those factors, could move the vessel towards the installation.Footnote 31 The OSV guidelines for weather-side operation specify the following precautions:
- 20-25 knots mean wind speed at 10 m level—Secure loose items and advise greater caution to prevent injury to personnel and damage to equipment.
- Above 25 knots mean wind speed at 10 m level—Operations cease.
- 3-4 m Hs—The OIM, crane operator, and master should assess the situation on positioning and cargo handling before arrival within safety zone.
- Above 4 m Hs—Operations cease.
- Above 50% propeller and/or thruster utilization—Operations cease.
The guidelines stipulate that a risk assessment shall be completed prior to any weather-side operation due to the risk posed by a vessel that is unable to maintain its position and pushed onto the installation by environmental forces. The assessment process should help the master decide the appropriate measures to take and would include the identification of the potential hazards, their severity and likelihood, the associated risk levels, additional risk reduction measures to continue the operation, and a reassessment to confirm that the remaining risks are within acceptable limits.
The guidelines stipulate that the risk assessment is to be approved by the master and forwarded to the rig OIM for review. Upon agreement between the master and OIM, work may resume according to the conditions stated in the risk assessment. Completed risk assessments are also to be forwarded to the vessel operator's shore management and Husky Energy. Although the risk assessment for weather side operations on the Maersk Detector was required to be completed by around 1400 due to the change in wind direction, the assessment was not done.
The OSV guidelines also stipulate that the operational status of any vessel operating in DP control should be monitored continuously. This requires that a method be established on board to alert the crew and relevant personnel to changes in the vessel's DP operational status. The method must reference the established status levels defined by the industry, as follows:
- Green alert—Normal operational status where DP performance is within safe working limits.
- Yellow alert—Degraded DP operational status when safe working limits are being exceeded or a non-critical excursion of heading or position is likely.
- Red alert—DP emergency status where there is loss of position or position loss is inevitable.
From approximately 1354, when the wind shifted, the Maersk Detector was operating in a DP yellow alert status, which changed to a red alert status in the final 30 seconds before the striking. However, there was no system in place on board to categorize or communicate this status.
Dynamic positioning capability analysis
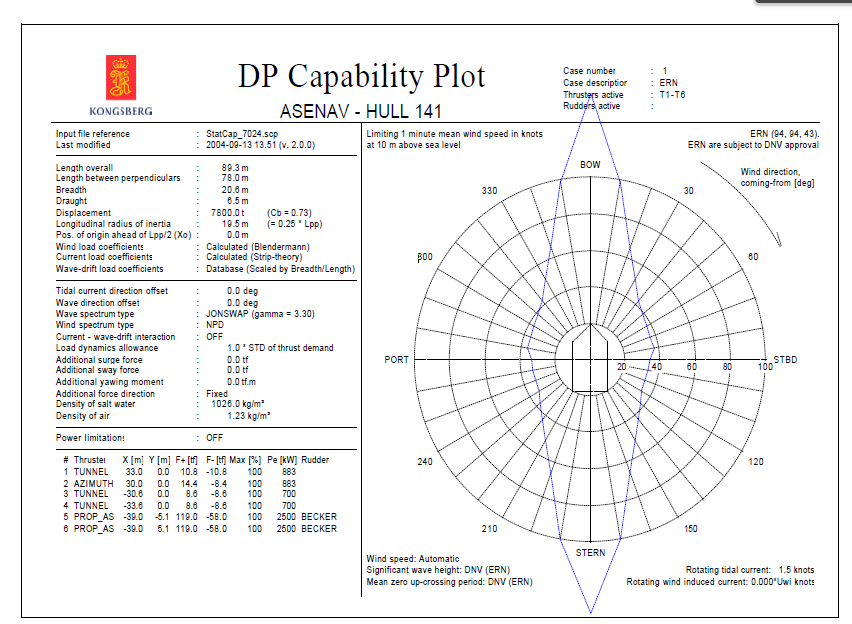
In order to provide vessel owners, operators, and crew with information regarding the ability of a vessel to maintain its position and heading, it is standard practice for a DP capability analysis to be performed.Footnote 32Footnote 33 This process uses static calculations to compare the total environmental load with the available thrust power, including a 20% dynamic reserve. The results of this analysis may be presented in the form of polar plots, each of which are produced for a given thruster configuration and show the theoretical limiting wind speed, from all directions, below which the environmental forces on the vessel can be counteracted by thrust.Footnote 34
The manufacturer of the DP system for the Maersk Detector performed such a DP capability analysis in 2004. The resulting polar plot can be seen in Appendix G, indicating the following notable results:Footnote 35
- The overall theoretical limiting wind speed is 33.2 knots from directions 110 and 250°, corresponding to waves with a significant height of 4.7 m.
- The theoretical limiting wind speed for winds coming from 20° off the bow (as on the day of the occurrence) is 65.6 knots, corresponding to waves with a significant height of 10.1 m.
In addition to the theoretical capability analysis described above, the DP system on the Maersk Detector incorporates an online capability analysis function. On the day of the occurrence, shortly after 1445, the master used this function to test the capability of the vessel should the Hs increase to 5 m. The results of this check were positive. At the time this check was performed, the vessel was heading 140° with winds of about 20 knots at about 50 to 60° off the starboard bow. The capability plot in Appendix G indicates that, with winds from this direction and with all thrusters operational, the theoretical limiting wind speed is 40 knots, corresponding to waves with a significant height of approximately 5.5 m.
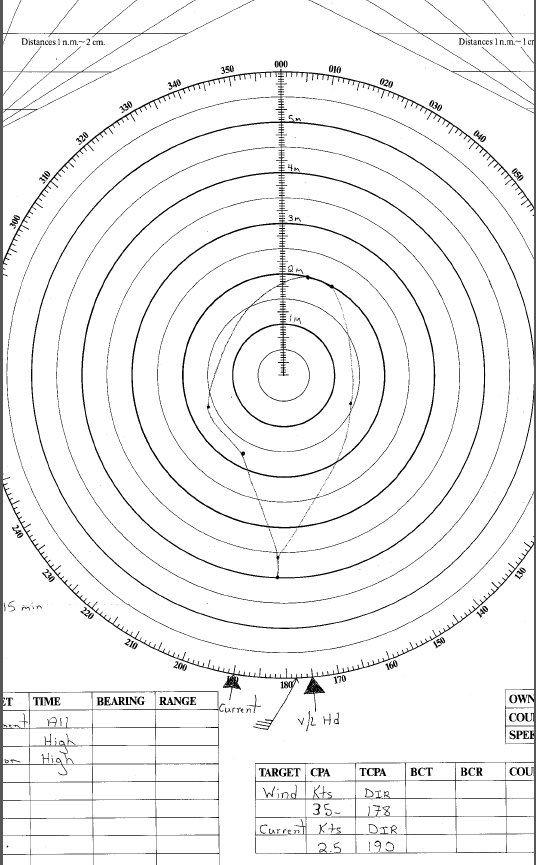
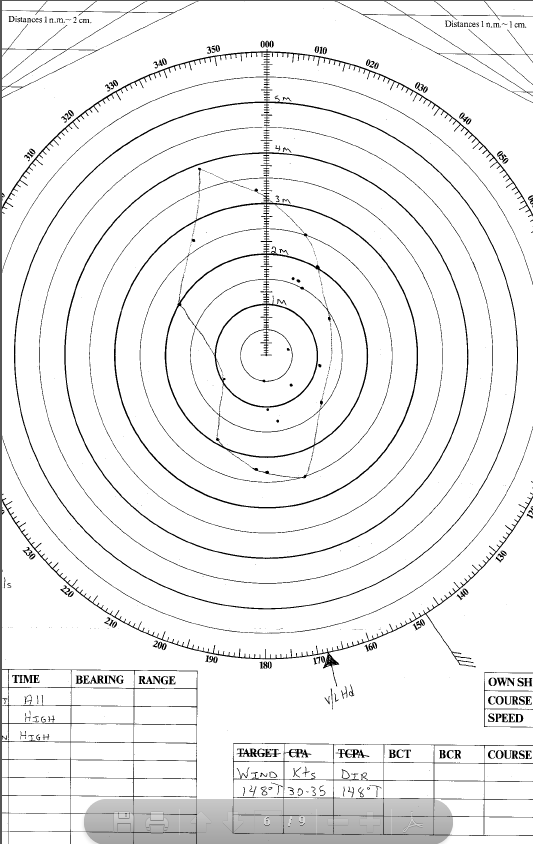
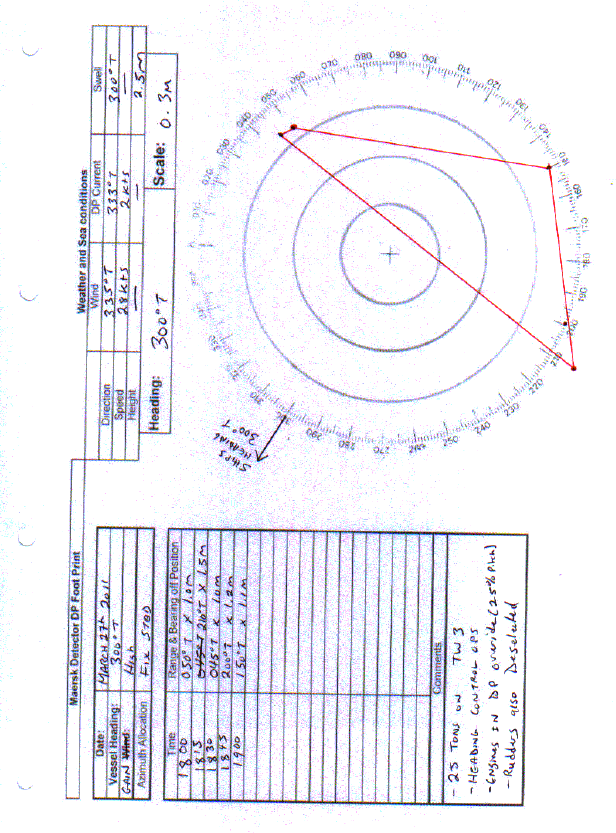
A means used to verify the adequate functioning of a DP system is the in-service footprint plots. These are plots of the vessel's position while operating under DP in actual environmental conditions and thruster configurations. The excursion distancesFootnote 36 depend on many factors, one of which is wind or wave/swell induced movement. Table 5 below summarizes those examples of past footprint plots for the Maersk Detector that were developed in environmental conditions and thruster configurations similar or worse than those on the day of the occurrence. Although a footprint plot was not prepared on the day of the occurrence, relevant data for that day is also presented for the purpose of comparison (Appendix H).
| Vessel heading | Wind speed (knots) | Wind direction | Seas/Swell | Max excursion recorded | |
|---|---|---|---|---|---|
| Occurrence | 180° | 18–24 | 200° (20° off stbd bow) | 4.5 m (Hs) | 15 m (aft) |
| Footprint (a) | 175° | 35 | 178° (3° off stbd bow) | Unknown | 4 m (fwd) |
| Footprint (b) | 168° | 30–35 | 148° (20° off port bow) | Unknown | 3.9 m (aft) |
| Footprint (c) | 168° | 35–40 | 150-160° (8 to 18° off port bow) | Unknown | 2.7 m (fwd) |
| Footprint (d) | 300° | 28 | 335° (5° off stbd bow) | 2.5 m | 1.5 m (port) |
Bridge resource management
Bridge resource management (BRM) is the effective management and use of all resources, human and technical, available to the bridge team to ensure the safe completion of the voyage. BRM includes workload management, problem solving, decision making, teamwork, and situational awareness, especially during critical operations. Specifically, bridge team members have a responsibility to maintain overall situational awareness as well as be responsible for their individual duties. Furthermore, since a team must work together toward a common goal, the exchange of information is necessary for the team to be effective.Footnote 37 Poor communication can result in a crew not sharing a common understanding of a situation.
In this occurrence, neither the master nor FON had completed any formal BRM training. TC does not require bridge officers to complete BRM training to achieve or maintain their certificates of competency, although they do set standards for non-mandatory BRM training.Footnote 38 However, TC is planning to amend the Marine Personnel Regulations (MPR) with respect to BRM requirements of the Convention on Standards of Training, Certification and Watchkeeping of Seafarers (STCW) and subsequent Manila Amendments in 2010. The planned TC amendments would mean that BRM competencies and knowledge would be required to obtain a Watchkeeping Mate certificate of competency and, secondly, the TC approved STCW BRM training course would be mandatory to obtain the following certificates of competency:
- Master Mariner
- Master, Near Coastal
- Master 3000, Unlimited
- Master 3000, Near Coastal
- Chief Mate
- Chief Mate Near Coastal
Outstanding board recommendations
In 1995, the TSB published its report, A Safety Study of the Operational Relationship between Ship Masters/Watchkeeping Officers and Marine Pilots.Footnote 39 The objective of this study was to identify safety deficiencies associated with teamwork on the bridge, including communication between marine pilots and masters/officers of the watch. The report raised safety concerns related to the implementation of effective BRM by bridge teams and made the following recommendations, which have not yet been found Fully Satisfactory:Footnote 40
The Department of Transport require that the initial training syllabus for all ship officers be modified to include demonstration of skills in Bridge Resource Management.
Transportation Safety Recommendation M95-09
The Department of Transport require that all ship officers demonstrate skills in Bridge Resource Management before being issued Continued Proficiency Certificates.
Transportation Safety Recommendation M95-10
In January 1996, TC stated in its response to these recommendations that it will promote the development and provision of BRM training courses and that there can be a requirement for prior completion of such a course once they are available in Canada. TC further indicated that such a requirement would be phased in depending on the certificate of competency held by the candidate. The responses to both recommendations have been assessed as Satisfactory Intent by the Board.Footnote 41
Analysis
Events leading to the striking
While the Maersk Detector was loading cargo from the rig GSF Grand Banks, the wind direction veered as expected, putting the vessel on the weather side of the rig. When this happened, the vessel's ability to maintain position degraded, as indicated by the increased frequency of heading and position warnings/alarms.
When the vessel's heading changed to 180° for the final cargo operation, this significantly altered the master's visual perception of the distance between the vessel and the port aft intermediate rig column as it increased the sighting distance and viewing aspect of the column from the bridge. Furthermore, the pitching of the vessel changed the amount of water that was visible behind the stern; at times, little or no water would be visible, and at other times the entire distance between the stern and the rig column would be visible. As such, it would likely have been very difficult to maintain an accurate judgment of the distance by visual observation.
The master then began repositioning the vessel for the final load, towards a position 15 m off the rig. For approximately the next 5 minutes, the voyage data recorder (VDR) data indicates that the distance between the vessel and rig was increasing and decreasing in an oscillatory manner (Appendix E). At around 1529, the master advised the crane operator that he was in position and ready to load.
The VDR data at around the same time indicates that the vessel settled into a position for about 30 seconds. However, when viewed in context of the trend over the previous 5 minutes, the vessel was actually at the peak of a movement away from the rig. After the 30 second period, the vessel began to move towards the rig again.
Between 1524 and the time of the striking, the alarm log identified 5 position-out-of-limits warnings and 2 alarms. In addition, the dynamic positioning (DP) system registered reference prediction error warnings with both GPS just prior to the striking. The operation continued throughout without any reassessment of the ability to maintain the vessel position within the alarm limit. The master continued to work outside the alarm limits, as some of these alarms were induced by position change commands that he had input. The master prioritized his visual assessment of distance over the alarms issued by the DP system, which were indicating that the vessel was not maintaining its position well.
The VDR data further shows that just before 1530 when the pipe loading operation started, the available thrust was acting forward to push the vessel away from the rig. At the same time, the vessel began to move towards the rig. As the vessel approached the rig, the appearance of the stern moving up and down in relation to the rig column would have become more pronounced. Both this change in appearance and the ongoing positioning of the first pipe onto the deck captured the master's attention and impacted his ability to monitor the DP consoles. Despite having entered a command to change position by 4 m forward, the vessel continued to move astern. Because the pipe on the deck was still attached to the crane, the master decided not to take manual control to avoid the possibility of pulling down the crane. The amount of forward thrust applied by the DP system in these final seconds was insufficient to counteract the forces acting to push the vessel astern and the vessel struck the rig.
Dynamic positioning capability
Examination of available information regarding the station-keeping ability of the Maersk Detector indicates that the vessel would be able to maintain its position within the prescribed limits. This is supported by the following:
- Theoretical capability analysis indicated that the vessel thrusters should have had sufficient thrust to maintain position in the conditions prevailing at the time of the occurrence;
- Post-occurrence trials confirmed that the DP system was functioning in accordance with all relevant criteria and there were no indications of any problems or issues with the system that may have affected the station-keeping of the vessel;
- Leading up to the occurrence, the vessel thrust applied was less than 5 percent for the main propellers and less than 40 percent for the azimuth thruster, indicating that there was significant reserve thrust; and
- Immediately after the striking, the vessel quickly returned to a position of about 15 m away from the rig in auto-position mode and maintained this position as the lift was disconnected. The thrust used to achieve this was less than 5 percent for the main propellers and just over 40 percent for the azimuth.
Nonetheless, for a period of approximately 6 minutes prior to the striking (after the heading change to 180°) the station-keeping of the Maersk Detector was unsteady, with the VDR position data exhibiting the vessel's oscillatory motion towards and away from the rig. The final movement of the vessel towards the rig could therefore be expected. Furthermore, the VDR data for thrust and separation distance were 180° out of phase with each other. This is indicative of a coupling effect whereby the operator input (in this case the DP control system or the master) is driving the motion of the vessel into an undesirable state. The investigation considered the following factors as possible causes of this coupling effect:
- After the heading change, the waves were acting to push the vessel astern and the DP model may have been in the process of adjusting to compensate for this.
- The effect may have been induced by the master entering position move commands on the DP console as he attempted to steady the vessel in a favourable position for the cargo operation. The multiple alarms and warnings on the DP system may have caused the master to input these position change commands, or, conversely, may have been caused by these commands.
- In addition to the above, several other factors were considered as possibly having contributed to the striking:
- the VDR data showed a momentary dip in forward thrust at 1530:35;
- the possibility that one or more large swells were experienced by the vessel immediately before it struck the rig; and
- the positioning accuracy of the vessel reference systems had deteriorated just prior to the striking as indicated by the "reference prediction error" warnings noted on the alarm log.
The investigation was unable to conclusively determine the extent to which any of these factors may have influenced the motion of the vessel; however, they may have contributed to the vessel's inability to maintain a position off the rig.
Bridge resource management
In order to maintain overall situational awareness, it is critical that members of the bridge team know the master's intentions and inputs if they are to offer timely advice or observations. This can be achieved with an initial briefing followed by regular exchange of information between members of the bridge team, including the master. The need to maintain situational awareness and thus to practice effective teamwork and communication between bridge team members is equally important when operating in DP mode as when navigating in the conventional sense. This principle is recognized in industry standards which state that, "When operating a DP system, the key DP personnel should not only be competent and experienced with the vessel, but able to work together and communicate effectively."Footnote 42
In this occurrence, the master was primarily operating the DP system while the first officer navigation (FON) was acting as the officer of the watch (OOW) and was monitoring the cargo operation from a position next to the master; there was a bridge team of two. In the increasing seas occurring after the weather veered, frequent position and heading alarms and warnings were registered by the DP system. However, in the final minutes before the striking, the master's attention was more focused on visually monitoring the distance from the rig and he did not fully review and assess the DP positioning data, warnings, and alarms. Meanwhile, the FON continued watching cargo operations without maintaining any awareness of the DP system.
According to the principles of good bridge resource management (BRM), despite each crew member having a primary duty, that duty should not prevent them from maintaining awareness of the other's activities and working as a team. In this occurrence, however, the master did not inform or discuss his actions at the DP console with the FON, nor was this requested by the FON. The result was that the vessel's positioning data streaming on the DP displays was not being adequately monitored.
This absence of effective BRM delayed recognition that the conditions were deteriorating and the vessel was at risk of striking the rig, preventing the bridge team of the Maersk Detector from taking adequate evasive action. They did not sufficiently use the information provided at the DP consoles and did not work as a team to help ensure that the vessel's distance from the rig was maintained.
As demonstrated by this occurrence and others,Footnote 43 shortcomings in the implementation of BRM principles have been a factor contributing to marine accidents. However, there is no regulatory requirement in Canada for bridge officers to complete training or demonstrate continued proficiency for BRM as a prerequisite to achieve or maintain certificates of competency. In this occurrence, BRM training/proficiency was also not required by the company, nor had the bridge team undertaken it voluntarily. In the absence of formal training and continued proficiency in the principles of BRM, there is an increased risk that bridge team awareness will be impaired, thereby increasing the risk to the vessel, its complement, and the environment.
Risk assessment for cargo operations
The completion of a risk assessment serves to increase the awareness of all involved of the potential risks associated with an operation and review or identify mitigating measures. It provides the crew an opportunity to objectively review, discuss, and remind themselves of the risks of a particular operation and the control measures that could or should be put into effect as well as the appropriate response measures to take if an accident or incident were to occur.
Between 1330 and 1400 the rig port side changed from lee to weather side, requiring the master to complete a risk assessment in accordance with the operator's Offshore Service Vessel (OSV) guidelines. However, a risk assessment was not completed by the bridge team, nor was it requested by the rig.
The master did take some steps to assess environmental conditions and the vessel's capability:
- Around 1450, the master initiated a capability analysis of the DP system and the result indicated that the vessel could maintain position on any heading in the existing weather conditions at the time, but with a significant wave height (Hs) of 5 m;
- The master contacted the rig to obtain Hs information; and
- The master discussed cargo operations with Husky Logistics and the possibility of stopping operations.
The crew did not consider using the starboard side for cargo operations once it became the lee side and continued loading on the port side with the agreement that they would cease operations if the conditions worsened. This decision is indicative of plan continuation bias, which may occur when a person or team continues with a plan although conditions have changed to an extent that would not have necessarily been acceptable if they had been present at the beginning of a task.
Another approach may have been to cease loading, move further from the rig, and undertake the required risk assessment, which would have permitted the crew to institute specific risk control measures that may have mitigated the increased risk of continuing the operation.
Communication of weather information
With larger swell heights from the south, the master inquired about the significant wave height (Hs) by contacting the ballast control officer (BCO) at around 1500. The master was informed that the measurement was 3.5 m. The BCO had 2 references to provide this information: the meteorological reports (METAR) emailed at 1429 indicating 3.4 m, and the mooring advisory system (MAS) screen which indicated 3.5 m. However, at 1459, the weather observer's station on the bridge of the rig was indicating an Hs of 4.14 m. The MAS screen in the BCR was updated with this value at 1508. The METAR emailed to the BCR at 1526 indicated that the Hs had increased to 4.4 m.
In this occurrence, the limit of 4 m Hs for weather side cargo operations had been reached at least 30 minutes before the striking. This information was available at the weather station and in other areas on the rigFootnote 44 at least 20 minutes before the striking. However, when the limit was reached, it was not communicated to the vessel and crane operator; rather, they were required to request this information.
When environmental limits are in place, they must actively be monitored and communicated as soon as possible to all personnel tasked with operational decision making. The weather observer on the rig proactively informs helicopter operators when weather limits for helicopter operations at the rig are reached. In the absence of a similar procedure for marine cargo operations, the vessel and crane operator were unaware that the Hs limit had been reached and the loading operation continued.
Dynamic positioning status procedures
In critical DP operations where tolerances are low, such as a vessel maintaining position near an offshore installation, a key element of risk management is the awareness of all involved of the vessel's station-keeping status. This element is recognized in industry standards that require continuous monitoring of the vessel's operational status during DP operations with a means to alert all crew and personnel involved when the status changes.
Although required by the OSV guidelines, there was no system in place on the Maersk Detector for categorizing or communicating the vessel's status while DP was active. At no time during that day was the crane operator or rig advised that the vessel was experiencing a DP station keeping alert status even though numerous warnings and alarms were evident on the vessel's DP event log. The crane operator and rig were only advised after the striking.
In this occurrence, there was time available for coordinated action between the crane operator and the vessel to be taken, including emergency release of the lift, which may have avoided the striking. As evidenced in this occurrence, the absence of a well-established and practiced procedure for communicating emergency or warning messages, as well as the corresponding actions to be taken, increases the risk that key personnel will not be fully aware of an emergency, act in isolation, and make ineffective decisions.
Voyage data
The purpose of a VDR is to create and maintain a secure, retrievable record of information indicating the position, movement, physical status, and control of a vessel for the period covering the most recent 12 hours of operation. Objective data is invaluable to investigators when seeking to understand the sequence of events and identify operational problems and human factors.
In this occurrence, the VDR audio data was corrupted and unusable due to a software error. Furthermore, the DP data logger and panel log data was unavailable. This data would have benefitted the investigation by establishing all the control inputs made by the DP operator and those undertaken autonomously by the DP system. When electronic data, in this instance VDR audio data and DP data recording, are not available to an investigation, identification and communication of safety deficiencies to advance transportation safety may be precluded.
Findings
Findings as to causes and contributing factors
- At the time the master advised the crane operator that the vessel was in position and ready to load, the vessel, which had been oscillating towards and away from the rig, was at the peak of a movement away from the rig. Subsequently, the vessel began another movement towards the rig.
- The master gave priority to his visual assessment of distance and position over the dynamic positioning (DP) system's alarms and warnings, which were indicating that the vessel was not maintaining its position well.
- Although the vessel had sufficient reserve thrust available, the amount of forward thrust applied by the DP system in the final seconds was insufficient to counteract the forces acting to push the vessel astern, and the vessel struck the rig.
- The investigation could not explain conclusively the vessel's movement and inability to maintain a position off the rig. Both may have resulted from a combination of the following: the interaction between the operator and the DP system, a brief dip in forward thrust just prior to the striking, the possible effects of one or more large swells, and the deterioration of the positioning accuracy of the vessel reference systems.
- The bridge officers did not work as a team, nor did they make full use of the data available on the DP consoles in order to maintain the vessel's distance from the rig. Consequently, their awareness of the imminent striking was delayed, and this prevented adequate evasive action from being taken.
- The crew did not perform a risk assessment of the weather side operation and continued loading cargo without taking specific risk-control measures. Such measures might have mitigated the increased risk associated with the weather-side cargo operation.
- Because there was no procedure for providing relevant weather information to marine operators proactively, the vessel and crane operator did not know that the significant wave height (Hs) limit requiring termination of operations had been reached, and the cargo operation continued.
Findings as to risk
- The absence of a well-established and practised procedure for communicating and responding to emergency or warning situations increases the risk that key personnel will not be fully aware of an emergency, act in isolation, and make ineffective decisions.
- When voyage data, such as bridge audio and DP data recordings, are not available to an investigation, identification and communication of safety deficiencies to advance transportation safety may be precluded.
- In the absence of formal training and continued proficiency in the principles of bridge resource management, there is an increased risk that bridge team awareness will be impaired, thereby increasing the risk to the vessel, its complement, and the environment.
Other findings
- Wave measurements from the waverider buoy near the occurrence location indicate that it is possible that waves of 8.72 m and 9.62 m in height were experienced by the vessel around the time of the occurrence.
Safety action
Safety action taken
The TSB was informed that Maersk Supply Service Canada Ltd. has implemented the following changes:
- All bridge officers on board Maersk Detector on both shifts have received bridge resource management training.
- Shortly after the occurrence, a Safe Job Analysis (SJA) DP Operations which included the Husky Offshore Service Vessel (OSV) guidelines was developed and implemented.
- All SJA's pertaining to DP operations and working alongside have been updated to reflect the findings in the investigation report.
- The data logger manual has been placed on board the Maersk Detector. Some training is being provided to the crew to ensure that it is turned on and logging DP data.
- The Kelvin Hughes voyage data recorder (VDR) software on board Maersk Detector was updated on 6 December 2011 during the annual performance test (APT) of the VDR.
- Maersk Supply Service has incorporated stop work triggers into its risk assessment for DP operations and DP procedures to respond to emergency and/or warning situations on OSV's operating in DP.
The TSB was informed that Husky Oil Ltd. has implemented the following changes:
- All vessels operating on behalf of Husky have direct access to the weather service provider's website to ensure continuous up-to-date weather forecasting (including sea heights) is available at all times.
- A Husky Activity Specific Operating Guideline has been implemented. The guideline was developed by a third party DP Assurance Company by incorporating industry best practice and offshore operating guidelines.
- Husky has implemented annual DP competency assessment and training requirements to be completed on vessels by a third party DP Assurance Company. This will ensure continued education in DP operations, industry best practice, and guidelines for offshore DP operations.
- Husky completed information sessions with OSV contractors to clearly outline expectations while operating in the White Rose field. These sessions included clear explanation of DP alarm limits and required actions when alarms are activated.
- Husky and its contracted drill rig operator developed a 500 m zone work practice to ensure continuous communication, monitoring of work environment, and clearly defined roles of offshore installation managers for rig and vessel interactions.
- A presentation was delivered to other basin operators to share insight and lessons learned from the incident.
TSB was informed that Canada - Newfoundland and Labrador Offshore Petroleum Board (C NLOPB) has implemented the following changes:
- The C-NLOPB also requested that the Marine Operations Manual, Safety Case, and Emergency Response Plan for the GSF Grand Banks be updated. These requests are being actioned by Transocean Ltd.
- In July and September 2012, the C NLOPB safety department conducted marine operations audits on board both the Henry Goodrich and the GSF Grand Banks, which included a review of supply vessel operations.
- Recommendations for improvements and/or corrective actions such as training, updates to standing orders and procedures, maintenance of marine equipment, etc. were generated from these audits and are being implemented.
This report concludes the Transportation Safety Board's investigation into this occurrence. Consequently, the Board authorized the release of this report on . It was officially released on .
Appendices