Grounding
Container vessel Cap Blanche
Fraser River, British Columbia
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content. Masculine pronouns and position titles may be used to signify all genders to comply with the Canadian Transportation Accident Investigation and Safety Board Act (S.C. 1989, c. 3).
Summary
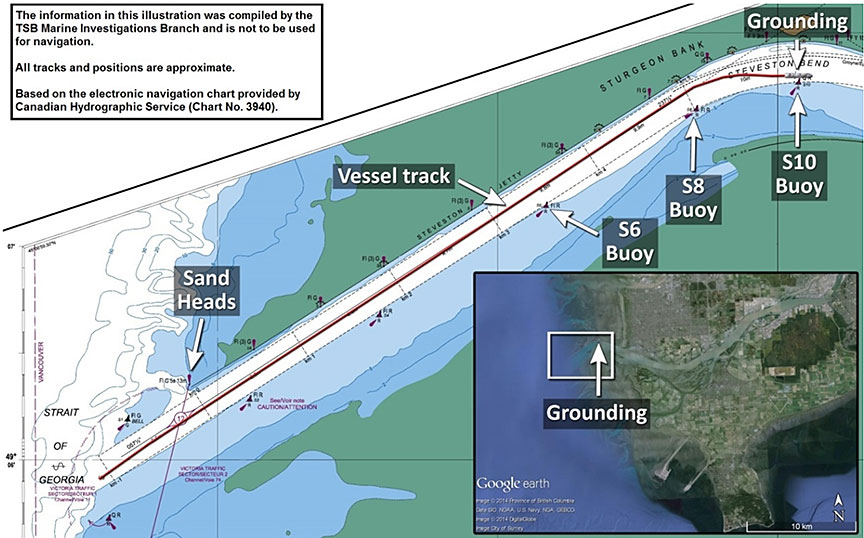
On 25 January 2014, at 2156 Pacific Standard Time, the container vessel Cap Blanche grounded within the buoyed channel in the Steveston Bend, British Columbia. The vessel was under the conduct of a pilot and was in reduced visibility due to fog. The Cap Blanche was refloated approximately 30 minutes after the grounding. There was minimal damage, there were no injuries, and no pollution occurred.
Factual information
Particulars of the vessel
| Name of vessel | Cap Blanche |
|---|---|
| IMO* number | 9311775 |
| Port of registry | Saint John's |
| Flag | Antigua and Barbuda |
| Type | Container ship |
| Gross tonnage | 28 372 |
| LengthFootnote 1 | 221.62 m |
| Draught at time of occurrence | Forward: 7.35 m Aft: 10.15 m |
| Built | 2006; Wismar, Germany |
| Propulsion | 1 main diesel engine (21 769 kW), driving a fixed propeller |
| Cargo | 15 329 tonnes of cargo, distributed in 422 forty-foot containers and 381 twenty-foot containers |
| Crew | 18 |
| Registered owner | Blanche Schiffahrts GmbH & Co, Germany |
| Manager | Harmstorf & Co., Germany |
* IMO: International Maritime Organization
Description of the vessel
The Cap Blanche is a container vessel equipped with 3 cargo cranes situated on the centreline of the main deck (Photo 1). The vessel has a capacity of 2741 TEU,Footnote 2 which includes 400 refrigerated container units. The accommodation and machinery spaces are located aft, and the vessel is fitted with a bow thruster.

The vessel has an integrated bridge system, and the bridge consoles are offset to the starboard side to minimize the effect of the blind spot caused by the centreline cranes. The integrated bridge system is equipped with an approved electronic chart display information system (ECDIS), an automatic identification system (AIS), a global positioning system (GPS), and 3-cm and 10-cm radars with automatic radar plotting aid (ARPA) capability. The vessel is equipped with an email system for business purposes that accommodates limited-sized attachments, but has no Internet access.
History of the voyage
On 25 January 2014 at 0624,Footnote 3 the Cap Blanche departed Tacoma, Washington, United States, for Fraser Surrey Docks in the Fraser River, British Columbia. During the transit, the master was informed that the berth was not ready for the Cap Blanche, and the vessel proceeded to the Constance Bank anchorage off Victoria, BC, where it anchored at 1324.
The berth became available later in the day, and the vessel proceeded to the Brotchie pilot station at 1718, picking up a British Columbia Coast Pilots Ltd. (BCCP) pilot at 1800. The Cap Blanche then proceeded to the mouth of the Fraser River, arriving around 2115 in fog. At this time, the bridge team was comprised of the master, the officer of the watch (OOW), and a helmsman.
A Fraser River pilot boarded at 2118 and discussed the transit with the BCCP pilot, at which point the Fraser River pilot took over the conduct of the vessel.Footnote 4 He set up his portable pilotage unit (PPU)Footnote 5 and connected his rate-of-turn generatorFootnote 6 to the pilot plug in order to monitor the vessel's progress. The pilot's PPU had a predictorFootnote 7 that continually self-updated to display the vessel's next 6 predicted positions at intervals of 30 seconds. The pilot also communicated with vessel traffic services (VTS) as required on his intentions and the vessel's position.
The pilot and the master then exchanged their respective passage plans. The pilot’s passage plan contained information on the transit, tidal window, tidal lift,Footnote 8 and under-keel clearance for 3 points on the voyage to the berth. The pilot had also included information on the berthing procedure at Fraser Surrey Docks. Furthermore, the pilot informed the master about anticipated traffic during the transit. The master in turn informed the pilot on the vessel's condition, including the anchors on standby and the steering gear for manoeuvring.
Shortly after 2130, the pilot increased the vessel's speed in order to overcome cross-currents at the mouth of the river and, at 2132, commenced a starboard turn to enter the Fraser River on the ranges.Footnote 9 The vessel passed the Sand Heads light at 2143 at a speed of 16 knots. The pilot set up a variable range marker with a radius of 0.5 nautical miles (nm) on the radar in order to monitor the vessel's progress in the river. At this time, the master was using the ECDIS located at the starboard conning position to monitor the vessel's progress, while the OOW was using a paper chart.Footnote 10
At 2150, the Cap Blanche passed buoy S6,Footnote 11 and the pilot ordered half ahead. When the vessel reached buoy S8 at 2152:30, the pilot, who was positioned at the radar with the PPU, ordered the rudder 15° to starboard to initiate the turn through the Steveston Bend. The pilot then used the predictor to assess the vessel's rate of turn and, as the vessel was turning, ordered the rudder angle to be reduced to 10° to starboard, 5° to starboard, and then midships.
At 2153:20, when buoy S8 was about midships, the vessel's heading was 065° gyro (G), and the rate of turn was 24.8° per minuteFootnote 12 to starboard at a speed of 14.3 knots. At 2154:30, the heading was 089°G, the speed was 13 knots, and the vessel had started to turn toward the south side of the channel. The pilot ordered counter rudder to port and full ahead on the engine to stop the turn to starboard and correct the vessel's position in the channel, but the vessel did not respond sufficiently, and it grounded just north of buoy S10 at 2156 within the navigable channel.
Following the grounding, the tanks were sounded, and the vessel was checked for damage. No ingress of water or pollution was detected. The master and pilot discussed options for refloating and agreed to make an attempt using the bow thruster. The master then requested that engine room start the thruster, and the pilot used a combination of thruster and engine movements to refloat the vessel on the rising tide. The vessel proceeded to Fraser Surrey Docks and docked at berth 7 at 0042.
Damage to the vessel
Transport Canada attended the vessel after its arrival at Fraser Surrey Docks following the grounding and requested an underwater survey of the hull. The survey was carried out on 27 January and indicated that the red anti-fouling coating between frame 90 aft and frame 46 on the flat bottom had been partially rubbed or washed off. The same observation was made with respect to the starboard side of the flat bottom (from approximately the lube oil stern tube tank to the aft of the vessel). The steel hull was observed to be otherwise intact, with no deep scratches or indentations.
Personnel certification and experience
All of the crew members of the Cap Blanche were certified for their positions on board.
The master had obtained a certificate as officer in charge of a navigational watch in 1992. After working ashore until 1999, he began working as a third officer. He obtained his master mariner certification in February 2006 and, in February 2007, was promoted to the position of master. This was the master's second trip on the Fraser River. He had taken bridge resource management (BRM) training as part of his licence, but had not taken a separate International Maritime Organization (IMO) model course.
The OOW had obtained a certificate as officer in charge of a navigational watch in July 2012. He had taken an IMO model course in BRM training.
The helmsman had been sailing as a deck rating since January 2009, and was promoted to able-bodied seaman in May 2013 when he joined the Cap Blanche.
The pilot on the Cap Blanche had obtained a Fraser River pilot licence, Class II, in November 2006. In November 2007, he obtained a Class I licence, allowing him to pilot any vessel on the Fraser River without restrictions. The pilot had completed a BRM course and had received training specific to his PPU.
Vessel certification
The Cap Blanche was certificated and equipped in accordance with existing regulations.
Environmental conditions
At the time of the occurrence, there was fog, and visibility was reduced to approximately 150 m. The bow of the vessel was not visible, and buoys could not be seen until they were alongside the vessel. There was light to no wind, and low tide at Sand Heads was at 1844. When the Cap Blanche passed the Sand Heads light at 2143, the tidal rise was 2.3 m above chart datum, and the current was ebbing at 0.3 knots. Thirteen minutes later, at the time of grounding, the tidal lift at Steveston Bend was approximately 1.8 m.Footnote 13 It had risen to 2.1 m by the time the Cap Blanche was refloated.
Fraser River
The Fraser River in British Columbia is 1375 km long and accumulates approximately 25% of the surface water in the province by the time it reaches its estuary.Footnote 14 Deep-sea vessels can access the river from the Strait of Georgia to Fraser Surrey Docks; the latter are located approximately 34 km upriver.
Silting in the Fraser River
Due to the large volume of water flowing through the Fraser River, an average of 3 million cubic metres of sediment is deposited in the navigable channel of the Fraser River each year. As such, silting is evident in certain areas of the river between Sand Heads and Fraser Surrey Docks, and is most pronounced when the freshet starts to subside (mid-August to early September). The areas of the river that are most influenced by silting are:
- Sand Heads Reach (between km 0 and km 5),
- Steveston Cut (between km 8 and km 11), and
- the entrance to Fraser Surrey Docks in Anneville Channel (km 33).
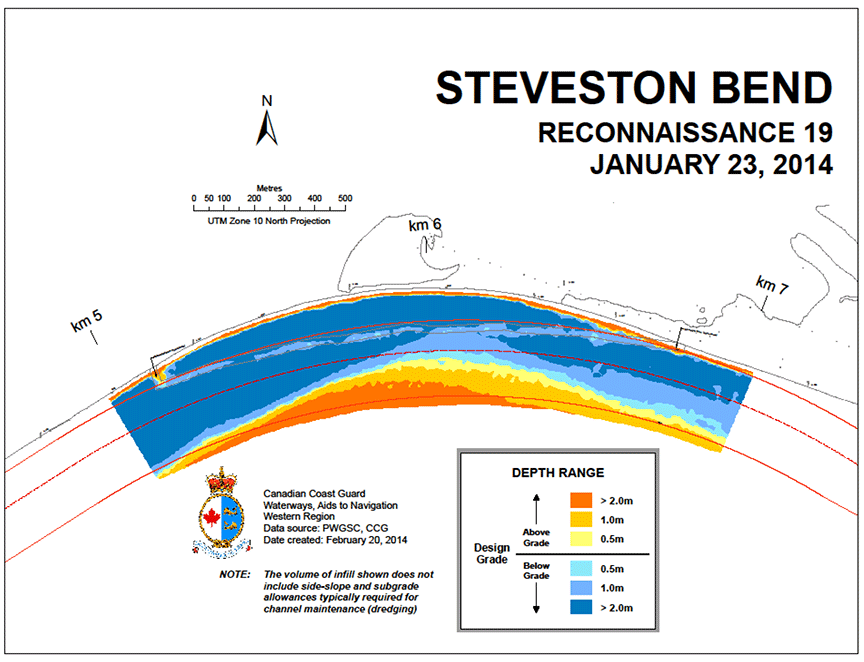
Another area that is prone to silting is the south side of Steveston Bend, where silting may reach mid-channel at certain times of the year. However, the north side is self-scouring, given the nature of the bend, and has much deeper water than the design depth of 10.1 m. Steveston Bend is deemed a major bend given its sharp radius and, although designed for 2-lane vessel traffic, is generally treated as a 1-lane channel for ships between km 5 and km 7.
At the time of the occurrence, the Steveston Bend had silting on the south side that extended into the navigable channel, thereby reducing the design depths of 10 m between kms 5 and 6 and 10.1 m between kms 6 and 7 (Appendix B). Buoy S10, which is approximately where the vessel grounded, is located on the south side of the channel and is slightly east of km 6.
Channel design
The Canadian Coast Guard (CCG) assists port authorities in following the minimum channel design and usage standards as promulgated in the Canadian Waterways National Manoeuvring Guidelines: Channel Design Parameters, which are based on PIANCFootnote 15 standards. The Fraser River channel design is based on these guidelines, on the needs of the river users, and on the locations and types of shipping and port activities on the river.
For the Fraser River, a 2-way navigable channel, with widths between 200 m and 260 m and a variable channel depth that can accommodate vessels with maximum draughts of up to 11.5 m, has been established by the Fraser River Port Authority.Footnote 16
Maintenance of the navigable channel is a collaborative effort between Port Metro Vancouver and CCG. Port Metro Vancouver administers and funds an annual maintenance program for the dredging of the Fraser River, which is currently contracted out to a local company. In general, dredging commences in June, when the river starts to deposit large amounts of sediment, and finishes between the end of February and mid-March.
The CCG is responsible for ensuring that the main channel is surveyed to monitor changing riverbed conditions and initial improvements due to dredging; this responsibility includes regular surveys to ensure that vessels up to a certain maximum sizeFootnote 17 can safely navigate. The surveying is contracted out to Public Works and Government Services Canada (PWGSC), which produces sounding surveys with updated depths. The CCG also owns and maintains a collection of fixed and floating navigation aids, including several ranges.
There is a weekly conference call hosted by Port Metro Vancouver with respect to channel conditions; this call is normally attended by representatives from CCG, PWGSC, Fraser Surrey Docks, Fraser River pilots, and the dredge contractor. During this meeting, items such as water flow and tide predictions are discussed, and surveying schedules are decided. Dredging priorities are set, based partially on input from the Fraser River pilots.
Navigational information
The CCG maintains a publically accessible web portalFootnote 18 called Avadepth, where the PWGSC sounding surveys for the Fraser River can be downloaded. During freshet, these sounding surveys may be updated as frequently as once a week. There are several other features on the portal, such as calculations of tidal windows and reports on predicted water levels and currents. The information from the surveys is available to Fraser River pilots in the form of an addendum for their electronic charts, and can be downloaded into the pilot's PPU.
The pilot in this occurrence had updated his PPU with the latest PWGSC-issued addendum for Fraser River depths. It is not standard practice for pilots to share these addendums with bridge teams, because of possible compatibility issues with the various types of navigational equipment on different vessels (e.g., electronically sharing the survey is not possible if the vessel is not fitted with an ECDIS).
The Canadian Hydrographic Service produces a paper and electronic chart for the Fraser River. At the time of the occurrence, the vessel was carrying the paper chart, which depicts the entire width of the river from Sand Heads to the berth as a dredged channel, with a dredged depth noted for each kilometre. The paper chart contains a cautionary note that states:
Depths shown on this chart are subject to change as a result of silting, scouring and dredging. For the latest available depths in the dredged area, consult the Canadian Coast Guard website Avadepth Water Depth Forecasting for the Fraser River (http://www2.pac.dfo-mpo.gc.ca).Footnote 19
The electronic chart contains the same note cautioning of silting, scouring, and dredging. The bridge team had not accessed the Avadepth website prior to picking up the pilot. The Cap Blanche, like most cargo vessels, did not have Internet access.
Voyage planning
A voyage plan provides a comprehensive, step-by-step description of how a voyage will proceed from berth to berth. Preparing a voyage plan involves considering factors such as potential navigational hazards, environmental conditions, tides and currents, water depths, sea room, and vessel speed.
The bridge team on the Cap Blanche had prepared a voyage plan for the passage from Tacoma to Fraser Surrey Docks. The voyage plan had been completed using the company form, and included information such as waypoints, draughts, distances, call-in points, and the safe speed within port limits (6-12 knots). There was a note stating that safe speed in the Fraser River was 10 knots, with a draught of 11.5 m. The waypoints from the company form had also been transferred onto the paper chart and ECDIS.
Pilotage
Navigating the Fraser River is a complex task, due to variables such as tide, current, rate of flow in the river, silting, visibility, state of the freshet, destination on the river, traffic, and draught of the vessel. Vessels greater than 350 in gross tonnage are therefore required to carry a Fraser River pilot. Fraser River pilots are employed by the Pacific Pilotage Authority (PPA), which is responsible for pilotage services along the coast of BC.
Pilotage techniques in the Fraser River are at the discretion of the pilot. Pilots make use of ranges that are in place for both inbound and outbound transits, and of buoys and fixed lights that mark the boundaries of the navigable channel. In addition, pilots may use a variety of navigational equipment (radar, GPS, PPU) in order to aid in the vessel's safe passage. Besides visual cues provided by ranges and buoys, a common practice among navigators is to cross-check the progress of a vessel using these various pieces of navigational equipment to ensure the accuracy of the equipment and identify equipment errors.
Radar
Radar provides a navigator with a visual indication of the vessel's position in relation to its surroundings. In conditions of reduced visibility, radar is an effective navigational tool, as its radio waves are not affected by conditions such as light, darkness, fog, etc. In the Fraser River, pilots normally set up the radar with a variable range marker of 0.5 nm. The intersection point with the heading marker is then used as a means to verify the vessel's rate of turn and the vessel's position in the river.
Portable pilotage unit
As well as use of the vessel's navigational equipment, between 2009 and 2010, the PPA provided each Fraser River pilot, including the pilot in this occurrence, with a PPU, a rate-of-turn generator, and a wide area augmentation system (WAAS)-based differential global positioning system (DGPS) antenna.Footnote 20
The PPU that was provided to the pilots has a predictor function that projects the vessel's future position(s) by performing geometric calculations based on the vessel's current rate of turn, position, heading, course over ground (COG), and speed over the ground (SOG).Footnote 21 The COG and SOG are derived from GPS values that are continuously fluctuating, even when the vessel maintains a constant speed and course. The fluctuation in values is due to inherent errors and inaccuracies in the GPS. In order to stabilize these values, a GPS smooths these inputs using an algorithm that calculates the average speed and course, and thus provides the user with a more stable COG and SOG. The interval of time over which smoothing occurs can be user-defined in most cases, and may vary from 2 to 30 seconds. As a result of GPS smoothing interval settings, values for COG and SOG may lag. In addition, the actual values of the vessel position may lag, in some cases up to a ship's length, resulting in inaccurate depictions of the vessel's position on navigational equipment, such as on a pilot's PPU. The use of WAAS-based DGPS antennas provides more accurate data on the vessel's position. These antennas use a default GPS smoothing interval of 4 seconds for SOG and 6 to 8 seconds for COG, making the smoothing interval a known value that can be accounted for when using the PPU.
Following the issue of the above-noted navigational equipment, the pilots were sent for a 5-day training course that oriented them on the operation of the equipment and functions of the software. The pilots practised using the equipment with data input provided by the trainer. The course did not include details about GPS smoothing intervals.Footnote 22
Use of the PPA-issued navigational equipment is at the discretion of the pilot during a voyage, with the exception of voyages through Second Narrows, where the use of the PPU and WAAS-based DGPS antenna is required by the PPA. At the time of the occurrence, the pilot's PPU was obtaining GPS data from the Cap Blanche's AIS, which had an unknown smoothing interval,Footnote 23 and the predictor was set to display 6 vessel positions, each at 30-second intervals.
The pilot did not have his WAAS-based DGPS antenna with him on this voyage, as he had experienced technical problems with itFootnote 24 on prior voyages. These problems were not reported to the PPA, and the PPA does not have a formal process to track problems with navigational equipment issued to pilots. The PPA does have spare equipment, and pilots can switch out equipment when it is defective.
Master-pilot exchange
When a pilot embarks, the pilot and master normally conduct a master-pilot exchange to help establish a shared mental model of the voyage, exchanging information on details such as intended courses and route, speed of the vessel, areas to be avoided, and where and when turns will be made. The ongoing exchange of navigational information for the duration of the voyage helps the pilot and bridge team work cooperatively to monitor the vessel's position and movement.
In 1995, the Transportation Safety Board (TSB) completed a safety study on the operational relationship between marine pilots and vessel masters/watchkeeping officers. The objective of this study was to identify safety deficiencies associated with teamwork on the bridge, including communication between marine pilots and masters/officers of the watch. In the report on the study, the Board noted that a pilot's decision making “can become the weak link in a system prone to single-point failure; i.e., in the absence of effective monitoring, there is little safety backup for the pilot in the navigation of the vessel.”Footnote 25
In this occurrence, the pilot did not share the information about silting in the Fraser River with the bridge team, and the bridge team had not taken steps to obtain information about the silting.
Comparison voyage
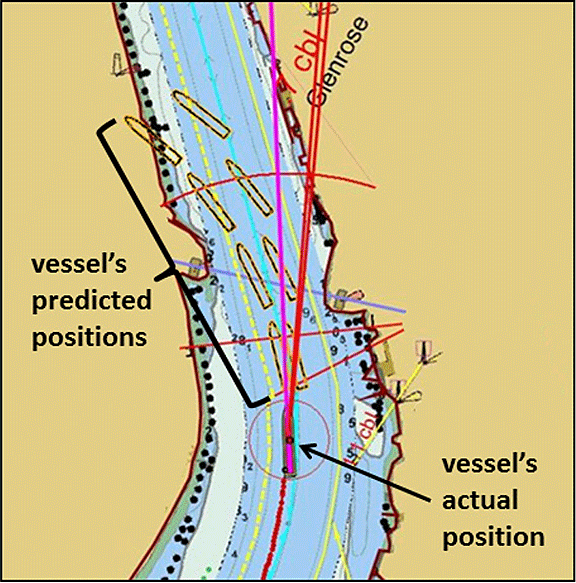
On 22 March 2014, a TSB investigator, accompanied by 2 Fraser River pilots, boarded the Cap Blanche to observe the vessel transiting the Fraser River to the same berth as that of the occurrence voyage. During the voyage, a comparison was made between the vessel-positioning data provided by the vessel's AIS versus that provided by the pilot's WAAS-based DGPS antenna, both of which were set to their pre-determined GPS smoothing intervals. The comparison found that the WAAS-based DGPS and AIS provided data that resulted in a discrepancy between the projected vessel positions (Figure 1). The projected vessel positions were less accurate when the PPU was connected to the AIS.
Previous occurrences
On 08 November 2003, the container vessel Cielo Del CanadaFootnote 26 grounded at the entrance of the Fraser River on an outbound voyage. The TSB investigation found that the conduct of the vessel had been handed over to a coast pilot prior to the vessel departing Pilotage Area 1, which is designated pilotage area for river pilots, and that the coast pilot was not aware of the restrictions in channel width. It also stated that neither the Sailing Directions: British Columbia Coast (Southern Portion) nor the Canadian hydrographic chart advised the mariner of the difference between the dredged deep channel and the actual buoyed channel widths.
As a result of the investigation, the Canadian Hydrographic Service issued a notice to mariners outlining that the Fraser River Port Authority maintains channel parameters by carrying out an annual maintenance dredging program. It also stated the dredged outer and inner channel widths with draught limitations and referred to a cautionary notice specifying that buoys do not indicate the width of the dredged channel and that, due to rapid silting/scouring and/or dredging, charts may not show the latest conditions.
Analysis
Events leading to the grounding
In this occurrence, the pilot initiated the turn near buoy S8 at a decelerating speed of 14.5 knots. In the absence of visual cues due to reduced visibility,Footnote 27 the pilot relied primarily on the projected vessel positions displayed on the portable pilotage unit (PPU) to monitor the vessel's rate of turn, and did not notice that, at one point, the rate of turn had reached twice the average value through the Steveston Bend, causing the vessel to deviate from its intended route and into the south side of the channel. The PPU was obtaining information from the vessel's automatic identification system (AIS), which was subject to global positioning system (GPS) smoothing. As a result, the predicted vessel positions displayed on the PPU were not accurately reflecting the vessel's future positions, but the pilot was unaware of this.
Although the pilot had the latest information on silting in the river, this information had not been exchanged with the other bridge team members, and the bridge team had not taken steps to obtain information about the silting. Therefore, despite the fact that the bridge team was monitoring the vessel's progress, they were unable to identify the developing unsafe situation. When the pilot realized that the vessel's rate of turn was too high, he applied counter rudder and ordered full ahead; however, the vessel did not respond sufficiently. The vessel's rate of speed limited the time available to take corrective action, and the vessel ran aground just north of buoy S10, within the channel limits.
Monitoring the vessel's progress
To ensure the safe passage of a vessel, navigators use visual cues and information from multiple types of navigational equipment. Frequent cross-checking of navigational equipment is essential for accurate monitoring of the vessel's progress, especially in reduced visibility and during manoeuvres in restricted waters.
In this occurrence, because of the reduced visibility, the pilot's options for monitoring the vessel's progress were limited. As the turn in the Steveston Bend was initiated, the pilot relied primarily on the visual display of projected vessel positions to monitor the vessel's rate of turn in the Steveston Bend, and did not verify the information with the other means available, such as the radar or the rate of turn value displayed on the PPU. Cross-checking with other navigational data during the early stages of the turn may have alerted the pilot that the vessel was not proceeding as indicated by the predictor and that corrective action was required. However, by the time the pilot cross-checked the vessel's progress, the application of counter rudder and increased speed were insufficient to arrest the vessel's turn.
If a navigator relies on a single piece of navigational equipment, there is a risk that potential errors or inaccuracies will go undetected.
Communication of navigational information
During a transit, the ongoing communication of relevant navigational information between members of the bridge team facilitates monitoring of the vessel's progress and enables all navigating officers to take an active role in identifying potential unsafe situations and trapping errors.
In this occurrence, a master-pilot exchange had taken place, and pilot and bridge team were sharing information as the voyage progressed; however, the pilot had not communicated with the bridge team members about the extent of silting within the navigable channel in the Steveston Bend or about his intention to stay on the north side of the bend. While bridge team members were monitoring the vessel's progress, they had not taken steps to obtain information about silting in the river. Therefore, when the vessel deviated away from its intended route and into the south side of the channel, where the water depths were less than the design grade, the bridge team was unable to identify, or to assist the pilot in resolving, the developing unsafe situation.
Furthermore, although the bridge team had prepared a voyage plan that indicated a safe speed within port limits of 6 to 12 knots, the pilot exceeded this speed in the river. Despite the reduced visibility, the bridge team did not initiate a discussion with the pilot to establish a common understanding of the vessel's speed during the transit, and the pilot did not communicate his intentions in this regard.
If information that may affect the safe passage of the vessel is not communicated between bridge teams and pilots, there is a risk that unsafe situations and conditions may persist.
Use of navigational equipment
Using the most accurate navigational equipment available is essential for safe navigation. To this end, each Fraser River pilot has a wide area augmentation system (WAAS)-based differential global positioning system (DGPS) antenna that improves the accuracy, integrity, and availability of GPS signals and thereby enables greater precision in tracking a vessel's position.
In this occurrence, the pilot did not have his antenna with him, having encountered some technical problems with it in the past, and had plugged his PPU into the vessel's pilot plug, which was obtaining data from the vessel's AIS. This AIS input was less accurate than that available from the WAAS-based DGPS antenna, because it was subject to an unidentified GPS smoothing interval. While the Pacific Pilotage Authority (PPA) leaves the use of these antennas to the discretion of pilots, it is in the best interest of navigators to make use of the most effective equipment available to ensure accuracy of navigational information.
If pilots do not make use of the most accurate navigational equipment available to them, there is a risk they will make decisions based on imprecise information.
Findings
Findings as to causes and contributing factors
- In the absence of visual cues, the pilot relied primarily on the projected vessel positions displayed by the predictor to monitor the vessel's rate of turn.
- The predictor function was using input from the automatic identification system that was inexact due to the global positioning system smoothing interval, but the pilot was unaware of this.
- The vessel's rate of speed upon initiating the turn limited the time available to respond to the developing situation.
- The vessel's rate of turn put the vessel on a course for the silting on the south side of the channel.
- The pilot did not share information about the extent of silting in the Steveston Bend, and the bridge team had not taken steps to obtain this information; as such, the bridge team was unable to identify or to assist the pilot in resolving the developing unsafe situation.
- Although the pilot applied counter rudder to arrest the turn, its effect was reduced because the vessel was decelerating, and the vessel ran aground just north of buoy S10.
Findings as to risk
- If a navigator relies on a single piece of navigational equipment, there is a risk that potential errors or inaccuracies will go undetected.
- If information that may affect the safe passage of the vessel is not communicated between bridge teams and pilots, there is a risk that unsafe situations and conditions may persist.
- If pilots do not make use of the most accurate navigational equipment available to them, there is a risk they will make decisions based on imprecise information.
Other findings
- The Pacific Pilotage Authority does not have a method to track problems with equipment issued to pilots.
Safety action
Safety action taken
Transportation Safety Board
On 08 May 2014, the Transportation Safety Board (TSB) issued a Marine Safety Advisory letter (MSA 04/14) to the Pacific Pilotage Authority (PPA), providing information about the discrepancy between input from a vessel's automatic identification system (AIS) and input from the pilots' wide area augmentation system (WAAS)-based differential global positioning system (DGPS) antennas.
Pacific Pilotage Authority
On 15 May 2014, the PPA distributed MSA 04/14 to all pilots in Notice to Pilots 209/14, and stated in the cover letter that the PPA encourages all users of portable pilotage units to also use the WAAS-based DGPS antenna and to not rely solely on vessels' AIS inputs.
This report concludes the Transportation Safety Board's investigation into this occurrence. The Board authorized the release of this report on . It was officially released on .