Steering-gear failure and subsequent grounding
The bulk carrier Cedar
Near Deschaillons-sur-Saint-Laurent
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content. Masculine pronouns and position titles may be used to signify all genders to comply with the Canadian Transportation Accident Investigation and Safety Board Act (S.C. 1989, c. 3).
Summary
While upbound in daylight and in fair weather at around 1422, the Cedar, under conduct of a pilot, lost rudder control off Deschaillons-sur-Saint-Laurent and grounded on the north side of the channel near buoy D-36.
While the fore part of the Cedar was hard aground, the after half of the vessel remained in the channel. After sounding the tanks, it was found that the forepeak and the No. 1 double bottom ballast tank on the starboard side were holed. It was decided to increase the aft trimming moment by ballasting the afterpeak and other ballast tanks located aft. Later that evening, with the high tide, the vessel was freed under its own power. It was then conducted to the Port of Québec, without further steering problems, for inspection and repairs. No injuries or pollution resulted from this occurrence.
Factual information
Particulars of vessel
| Name | "CEDAR" |
|---|---|
| Registry number | 10928 |
| Port of registry | Piraeus |
| Flag | Greece |
| Type | Bulk carrier |
| Gross tonnageFootnote 1 | 16 807 |
| Length | 175.64 m |
| Draught | Forward: 7.97 m Aft: 7.98 m |
| Built | 2001, Wuhu Shipyard, Wuhu, China. |
| Propulsion | 6650 kW B&W diesel, driving a single, fixed pitch propeller |
| Number of crew | 22 |
| Registered owner | Diana Shipping Agencies S.A.Athens, Greece |
Description of the vessel

The Cedar is a conventional bulk carrier with five holds and four cranes (Photo 1). The vessel was constructed under Lloyd's Register (LR) specifications and standards at the Wuhu Shipyard, China, to maximum St. Lawrence Seaway dimensions. At the time of the grounding the vessel remained classed with LR.
The vessel is equipped with a course and rudder angle recorder that gives a printout of courses steered and rudder angle achieved on a common time scale. Other data available from different sources on board include engine telegraph orders and an alarm log - both automatically monitored and each recorded on its own paper printout.
The wheelhouse steering position is equipped with a follow-upFootnote 2 (FU) wheel and a non-follow-upFootnote 3 (NFU) joystick and push button arrangement. There is also another NFU joystick on the main control panel of the wheelhouse. These control mechanisms are part of integrated "C. Plath" package that includes, among others, the telemotor transmitter, autopilot system, gyro and magnetic compasses.
History of the voyage
On 20 September 2001, the Cedar left the Wuhu shipyard on her maiden voyage, stopping first at Fangcheng, China. The vessel was loaded with bauxite, brown alumina grude and brown alumina dregs to a draught of 9.27 m forward and 9.64 m aft. The vessel departed Fangcheng on 30 September, bound for Québec, Quebec and Thorold, Ontario via the Panama canal. After a short stop at Hong Kong for bunkers, the vessel made the Pacific crossing and then transited the Panama Canal between October 31 and November 3. On November 13, the vessel was off Les Escoumins pilot station in the St. Lawrence River where a river pilot boarded.
As the vessel proceeded up river under the conduct of a pilot, both steering gear pumps were on line. Steering was carried out in manual mode from the steering station using the FU wheel. No steering anomaly had been noted since departing China.
The vessel stopped at Québec on the evening of November 13 to unload a portion of the brown alumina grude and obtain an acceptable Seaway draught of 7.98 m fore and aft. The Cedar departed Québec at 0955 on November 16.
Passage upriver was without incident, and the vessel was making about 9½ knots over the bottom, against the river flow and ebbing tide of approximately 2-3 knots. On the bridge at this time were the officer of the watch (OOW), the helmsman, a pilot and an apprentice pilot. Both steering pumps were on line and the helmsman was using the FU wheel. At about 1418, when the vessel was near Deschaillons-sur-Saint-Laurent, a course alteration to port was given and the helmsman brought the vessel onto 257° (G)(position 1, Figure 1)Footnote 4. Then, to complete the turn, the pilot ordered 248°, and then 246°, in quick succession. The helmsman put on 15° of port helm and the vessel's head shifted quickly to port, overshooting the requested 246° and stopping at about 238° (position 2, Figure 1). By now, the helmsman had applied starboard counter-rudder (approximately 19°) and the ship's head began to come back to starboard. He then put the helm first 10° then 20° to port in order to stop the swing at the required 246°. The vessel continued its starboard swing and, at approximately 1420, the helmsman realized that the rudder was not responding to port helm commands.
The pilot ordered hard to port, but there was still no response from the rudder. In very quick succession, both NFU joysticks were tried but neither gave any effect. The vessel was swinging to starboard and the current, setting at about 070°(T), had caught the port bow. At about this time, the master entered the bridge and was informed of the loss of steering. Full astern was ordered on the main engine and the crash stop sequence was initiated. Before astern power could be developed, the vessel exited the north side of the channel on a heading of approximately 285°. The Cedar was still making close to 9 knots and, as the bow came into contact with the channel bottom, the vessel's head shifted to port about 7° before coming quickly to a stop at 1422. The vessel was now aground at position 46°33'48" N; 072°07'33" W on a heading of 278°(position 3, Figure 1), the helm hard to port, but the rudder still to starboard about 4°.

Shortly after the grounding, the ship's electrician went to the steering gear flat and isolated the steering gear control from the wheelhouse using the emergency remote control transfer switch (Photo 2). He then tried the rudder from the emergency steering position using the NFU push buttons on either side of the switch. The rudder responded normally and after a few tests, he turned the emergency remote control transfer switch to the wheelhouse position. Subsequent tests from the wheelhouse confirmed the rudder was now following FU and NFU commands.
Tanks were sounded and it was found that the forepeak and No. 1 starboard double bottom ballast tank were holed.
The pilot and master agreed that a refloating would be attempted at the next high tide without tug assistance. Calculations were done on the vessel's loading computer for ballasting the afterpeak and other aft ballast tanks. The ballasting scenario resulted in a maximum bending moment of 88% of maximum at frame 111.
At 1930, two Transport Canada Marine Safety (TCMS) inspectors arrived on board. Various steering gear tests were undertaken and everything seemed to be working normally. At about 2100, near high tide, the vessel began to pivot to starboard - astern power was applied but the vessel remained aground. At about 2130, after nearly 30 minutes of continuous astern power application, and with the ebb tide about to begin, the vessel floated free. It was then backed into the channel and conducted down river to the Port of Québec for further inspections and temporary repairs.
Steering gear arrangements
The steering gear arrangements on the Cedar include a Rapson slide electro hydraulic steering gear, manufactured by Kawasaki (Type RM21-040). The rudder actuator is composed of two rams supplied by two variable-delivery pumps (main steering gear pumps), each with its own corresponding electric motor. The main pumps are operated through a floating lever arrangement that is actuated by one (or both) hydraulic telemotor receivers. Each telemotor receiver consists of a servo power unit and cylinder. The servo cylinders are mounted axially opposed to each other and connected to the floating lever at a common point (Figure 2).
The servo power units and their associated electrical arrangement were supplied by the shipyard. Each unit comprises an electric motor, hydraulic pump, control group valve chest as well as connecting hydraulic pipe.
The control group valve chest of each servo power unit includes a solenoid-operated directional control valve (DCV) and a hydraulically-operated servo cylinder bypass valve. The DCV solenoid receives a low voltage (24 V dc) control signal from the telemotor transmitter. The servo cylinder bypass valve is held in the bypass condition by a spring when system pressure is zero (servo pump off). When the servo pump is activated, the pressure builds up and overcomes the spring's force, closing the bypass and hydraulically locking the associated servo cylinder.
After the grounding it was found that, although both port and starboard bypass valves were in place on the control group valve chest of each servo power unit, they had been incorrectly installed (spring for spool valve on same side as servo pump pressure).Footnote 5
The port and starboard servo power units were connected electrically with their corresponding main steering gear pump (port or starboard) such that when a particular steering gear pump was selected (from the wheelhouse), the associated servo power unit was automatically activated. When both main steering gear pumps were selected for simultaneous operation, the two servo power units worked in tandem.
Each servo power unit has its own electrical starter panel, supplied by the shipyard during construction. Each starter panel comprises a motor contactor, various fuses and a transformer. After the grounding, the main power switch within the starter panel of the port side servo power unit, although still functional, was found in a state of partial disassembly. One of two bolts holding the switch assembly together had released.
During the course of the investigation, a loose wire was found within the emergency remote control transfer switch in the steering gear flat (Photo 2). This wire was the low voltage control signal to the starboard servo power unit DCV solenoid for port rudder activation. Other wires within this switch were also found loose. The wires exhibited signs of being crimped with a tool other than a proper crimping tool.
Control and operation of the steering gear
The servo cylinders receive oil via their respective directional control valves. When control input is applied from any source using FU or NFU methods, two distinct 24 V dc control signals are sent, one to each DCV solenoid on the port and starboard servo power units. Consequently, both DCVs operate at all times, regardless if one or both servo power units is actually in use.
Apart from the FU and NFU steering positions in the wheelhouse, there are two steering positions located within the steering gear flat. The first is a NFU arrangement where control is transferred to the steering gear flat by way of an emergency remote control transfer switch. Steering is then effected by pressing the NFU buttons just above the switch. This switch has a protective latch to prevent accidental selection of the emergency position. The second method, in the event of failure of both servo power units, manually activates the main steering pump(s) via the floating lever using the trick wheel, just forward of the steering gear.Footnote 6 To do so, however, the trick wheel must be engaged in the floating lever by inserting a bolt in the specified position.
As the remote steering control system is electric, an audible and visual alarm on the bridge is provided in case of electrical power supply failure for this system.Footnote 7 During the loss of steering event, no alarms were heard by any of the navigation team, nor was there any such alarm logged by the alarm log in the engine control room.
Servo power unit hydraulic piping
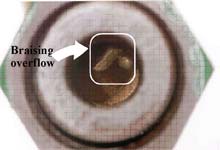
When installed at the shipyard, the connecting piping of the servo power units was copper. The piping connections were installed using direct braising methods and simple butt joints (Photo 3). Joints contained much excess braising material on the exterior, and the one examined in detail during the course of the investigation showed an overflow of braising material into the internal bore (Photo 4). It is estimated that the obstruction would restrict flow to about 70% of the design rate.Footnote 8 Bends in the piping were unsymmetrical and flattened at points to the extent that, during repairs subsequent to the grounding, TCMS required all servo power unit piping be replaced with steel piping, properly bent, fitted, and sized.

Sister ship
Constructed at the same shipyard, the Pine was delivered to the Greek operator, Diana Shipping Agencies, five months before the Cedar. The Pine was visited subsequent to the grounding of the Cedar and found to have identical steering gear arrangements to the Cedar except for the following:
- the main power switch for each servo power unit was intact;
- the hydraulic bypass valve for each servo cylinder was correctly installed;
- the bending and brazing work on the copper hydraulic piping of the servo-power units appeared somewhat better than that seen on the Cedar.
Trick wheel operating instructions
Emergency steering instructions posted in the steering gear flat on the Cedar (as well as the Pine) were engraved on two bronze plaques installed one above the other. Each plaque was intended to explain the use of the trick wheel and read as follows:
Plaque A
- In case of handling the trick wheel, insert the pin A into the position for emergency. In other cases keep the pin A releasing from the nut.
- Don't draw out the pins B and C.
Plaque B
- Disconnect the remote steering gear control system from the power circuit.
- Shift the pin of trick wheel to the position of for emergency.
- Operate the power unit by means of E/M start switch.
Trick wheel operation is necessary in the event of servo power failure. Incorrect installation of the servo power unit bypass valves on the Cedar meant that even when the servo pumps were off (or not functional), the associated servo cylinders were still hydraulically locked instead of in the bypass condition. In order for the trick wheel to operate the floating lever under these conditions, it would now require the extra step of decoupling both servo cylinders from the floating lever.
Damage to the vessel
The forepeak and No. 1 starboard double bottom ballast tanks were punctured between frames 216 and 235 (approximately 12 m in length) running from the keel plate to the starboard bilge. The shell plating in way of damage was set in approximately 600 mm. The duct keel plate in way of frames 175 to 185 was also set in. Other bottom plates were set in as far astern as frame 151 and affected tanks 1 P, 2 P&S, 4 P&S, 5 P&S, and 7 S.


Analysis
System design - twin servo power units
When the port side main steering pump was selected, so too was the port side servo power unit – and likewise for the starboard side steering pump/servo power unit combination. When working with both main steering pumps, both servo power units were also working in tandem.
There are distinct advantages when working two main steering gear pumps simultaneously. Rudder response speed is increased and realtime redundancy for the steering gear is assured. The International Convention for the Safety of Life at Sea(SOLAS), in fact, specifies the use of two main steering gear pumps where navigation demands special caution.Footnote 9 On the other hand, there are fewer advantages to running two servo power units simultaneously and, depending on the arrangement, some potential disadvantages. Although realtime redundancy is, in theory, assured, there is no real gain in rudder response time. With an arrangement such as on the Cedar, both servo power units must be precisely calibrated (flow and pressure) to give the same performance for a given control input. Any difference in output between the servo power units, for a given input, will result in one "fighting" the other.
At the time of loss of rudder control, both main steering gear pumps were in use, and by design so too were both servo power units. After the grounding, the ship's electrician transferred the steering gear control from the wheelhouse to the steering gear flat using the emergency remote control transfer switch. Control of the rudder returned to normal after this action. This switch was carefully examined and many wires were found to be loose. One particularly loose wire carried control signals for port rudder movement to the starboard servo power unit DCV solenoid. Between 1420 and 1422, port helm was applied in an attempt to stop the vessel's swing to starboard. An analysis of the recorded rudder movement shows that the rudder replied to the port helm commands in brief bursts (Figure 3). This would indicate intermittent performance of the rudder which is consistent with an on/off activation of the DCV solenoid for port helm, most probably caused by a loose wire alternately making contact and then losing contact.
The installation of the port and starboard servo power units did not conform to the plans submitted to LR. Specifically, these units did not have a functional hydraulic bypass arrangement for the servo cylinders. As noted, both port and starboard DCV solenoids are normally activated during steering operations, even if only one servo power unit is in use. The DCVs had thus acted as de facto bypass valves and had concealed the inappropriately installed servo cylinder bypass valves when only one servo power unit was being used. A malfunction of (or lack of control signal to) the DCV solenoid of either servo power unit, regardless of whether one or both units were in use, would create a hydraulic lock. The incorrectly installed servo cylinder bypass valves were not a factor in the grounding but under other circumstances, such as with only the port servo power unit in use, it could well have become one. Also, the mis-installation would have repercussions in the event that the vessel was steered using the trick wheel.
Even though the port servo power unit was in operation, it could not overcome the starboard servo cylinder that was in hydraulic lock (positive servo pump pressure but DCV in the neutral position due to lack of control signal). This effectively rendered the steering gear inoperable, without an accompanying alarm. Redundancy, while intrinsically a good thing, must be properly applied within a system in order to serve its intended purpose.
Alarms
At approximately 1420, the rudder stopped responding to helm orders, yet there was no accompanying alarm. The helmsman provided the navigation team with its first indication that something was wrong with the vessel's steering. In quick order, both NFU joysticks in the wheelhouse were tried without effect. Although power supply for both the main steering pumps and the servo pumps was monitored and had an alarm function, there was no alarm for the low voltage control signal.
Ideally, an alarm function should give the operator notice that the monitored device is not producing its intended output. In many cases, alarm function is tapped at the power supply junction - if there is no power supply, there is no output. This is also a SOLAS requirement for a steering gear control system.
In this instance, because of a loose wire within the emergency remote control transfer switch, the starboard DCV solenoid was not receiving the port helm command. Consequently, no port helm was actioned by this servo power unit. Also, the port DCV solenoid was receiving a port helm command, but could not operate the port servo cylinder against the hydraulically-locked starboard servo cylinder. As hydraulic pressure built up to the maximum output of the port servo pump, the safety valve would open, dumping the hydraulic fluid back into the tank. Although the steering gear control equipment had effectively failed to perform, no corresponding alarms had been activated.
Alarm function taken from the power source remains the most pragmatic and simple solution for notifying the operator that a device is not performing its intended output. It is not an infallible concept, however, and an absence of an alarm under these circumstances does not necessarily mean the device is indeed operational. The alarm function for the steering gear control system was taken at a point upstream of other possible failure points. Although conforming to the letter of SOLAS for alarm function, any failure downstream of this point would render the servo power unit inoperable without a corresponding alarm.
Quality control, testing and acceptance of steering arrangements
Many indications were found of substandard workmanship and components related to the steering arrangements and, in particular, the servo power units, such as;
- servo cylinder bypass valves improperly installed;
- inadequate crimping of wire connections;
- no detailed plan available for the servo power unit system;
- bending, fitting and braising work for the servo power unit's hydraulic piping less than adequate (although not a factor in the grounding).
Most of the above did not contribute to this particular grounding, but considering the Cedar was on its maiden voyage, it was a matter of time before one or another caused an occurrence. Since poor workmanship must ultimately pass Class/Flag survey before being accepted into service, this also indicates a less-than-adequate quality control at this level.
On the Cedar, a sophisticated telemotor transmitter is linked, via a servo power unit system, to an approved steering gear. Detailed plans and specifications were available, on board, for both the steering gear and remote control mechanism. This, however, was not the case for the servo power unit system. A system is only as strong as its weakest link. Consequently, it is essential that there be no deviation from the specification or design of the equipment during its assembly. Further, adequate testing and careful survey are essential to ensure that the "as built" arrangements conform to plans, specifications and intended use. Had proper tests of trick wheel operation been carried out prior to or upon delivery of the vessel, the improperly installed servo cylinder bypass valves would have been detected.
Compromised safety of vessels and personnel from less-than-adequate quality of inspection has been identified as a factor in other TSB investigation reports.Footnote 10 Quality control during vessel construction and rigorous standards for quality of inspection are essential elements for ensuring a safe vessel. This has been recognized by the International Association of Classification Societies (IACS) and the classification societies themselves, who view their role as a vital link in the safety chain for shipping.Footnote 11 Towards that objective, they have instituted a number of programs including enhanced class surveys (ECS) and early warning systems (EWS). Shipboard inspections by Class surveyors must be held to a high standard if the mission objective is to be met.
Trick wheel operating instructions
The trick wheel in the steering flat of the Cedar allows control signals to be manually inputted to the steering gear via the floating lever. It essentially does the job of the servo power units in the event of their failure. There must be zero pressure within the servo power unit hydraulic circuit (servo pump off), and there must be a functioning bypass arrangement in each circuit to allow movement of the trick wheel once it has been engaged with the floating lever. As mentioned earlier, bypass arrangements on the Cedar were not functional. This meant that the trick wheel could not be used without first disengaging the servo cylinders from the floating lever.
To ensure safety, it is essential that concise and complete instructions be posted for the operation of emergency steering equipment. SOLAS gives guidance in this respect, calling for simple instructions for emergency steering gear changeover to be posted on the bridge and in the steering gear compartment.Footnote 12
Neither Cedar nor the sister ship Pine had complete and unambiguous operating instructions for use of the trick wheel. The situation is further confused by having two sets of operating instructions posted on each vessel, each slightly different than the other. The instructions did not accurately reflect the procedures necessary to operate the trick wheel on the Cedar, given that the bypass valves had been incorrectly installed. Although not a factor in this grounding, the varying, incomplete and vague instructions posted for the trick wheel operation could hamper effective action during an emergency.
Findings
Findings as to causes and contributing factors
- A loose wire within the emergency remote control transfer switch resulted in an intermittent control signal and failure of the steering system to perform as required.
- The system design of the twin telemotor receiver arrangement was such that, during simultaneous operation, the failure of one unit could create a hydraulic lock condition and prevent the other unit from operating.
Findings as to risk
- Quality control of the assembly during construction and functionality of the servo power units' hydraulic and electrical components prior to delivery was inadequate.
- Full and complete emergency steering tests using the trick wheel were not carried out prior to or upon delivery of the vessel, resulting in an unnoticed latent defect within the steering gear until the accident.
- Varying, incomplete and vague instructions for trick wheel operation may hamper effective and timely action during an emergency.
- The alarm function for the steering gear control was taken at a point upstream of other possible failure points. Any failure downstream of this point would render the servo power unit inoperable without a corresponding alarm.
- The quality of workmanship, the material used and the method of bending and connecting the servo unit hydraulic piping of this new ship were substandard. These defects were neither remarked upon by the vessel's classification society nor corrected by shipyard quality control.
Safety action
Action taken
Subsequent to the grounding and while at Québec, Quebec between 19-23 November 2001, the following action was taken on board the Cedar:
- Servo power unit hydraulic piping was changed for steel pipes, properly bent and sized. The piping was also fitted so as to forego any welding or braising.
- Main power switches for both port and starboard servo power units were changed for more robust switches.
- Single telemotor use was instigated by installing a selector switch on the bridge and decoupling activation of each servo power unit from its respective main steering gear pump.
- Port and starboard servo cylinder bypass valves were re-installed in an appropriate fashion.
- Hydraulic servo power unit plans were drawn up and filed on board.
- All loose connections within the steering flat emergency remote control transfer switch were properly crimped and secured.
This report concludes the Transportation Safety Board's investigation into this occurrence. Consequently, the Board authorized the release of this report on .