Panne de l'appareil à gouverner et échouement
du vraquier Cedar
près de Deschaillons-sur-Saint-Laurent
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Vers 14 h 22, alors que le Cedar remonte le courant en plein jour et par beau temps sous la conduite d'un pilote, le gouvernail cesse de répondre à la barre au large de Deschaillons-sur-Saint-Laurent, et le navire s'échoue du côté nord du chenal près de la bouée D-36.
La partie avant du Cedar est échouée solidement, mais la partie arrière du navire est toujours dans le chenal. Le sondage des citernes révèle que le coqueron avant et le double-fond de ballastage no 1 tribord sont percés. On décide d'accroître le moment de changement d'assiette arrière en procédant au ballastage du coqueron arrière et des autres citernes de ballastage situées à l'arrière. Plus tard, ce soir-là, le navire se dégage à la faveur de la marée haute. On le conduit alors jusqu'au port de Québec sans autre incident de gouverne, pour inspection et réparation. Personne n'a été blessé, et l'accident n'a fait aucune pollution.
Renseignements de base
Fiche technique du navire
| "CEDAR" | |
|---|---|
| Numéro officiel | 10928 |
| Port d'immatriculation | Le Pirée |
| Pavillon | Grèce |
| Type | Vraquier |
| Jauge bruteNote de bas de page 1 | 16807 |
| Longueur | 175,64 m |
| Tirant d'eau | AV : 7,97 m AR : 7,98 m |
| Built | 2001, chantier naval Wuhu, Wuhu, Chine. |
| Groupe propulseur | 1 moteur diesel B&W de 6650 kW entraînant une seule hélice à pas fixe fixed pitch propeller |
| Équipage | 22 personnes |
| Propriétaires | Diana Shipping Agencies S.A. Athènes, Grèce |
Description du navire

Le Cedar est un vraquier conventionnel disposant de cinq cales et de quatre grues (photo 1). Le navire a été construit selon les spécifications et les normes du registre du Lloyd's (LR) au chantier naval Wuhu (Chine) aux dimensions maximales de la Voie maritime du Saint-Laurent. Au moment de l'échouement, le navire était classé au LR.
Le navire est équipé d'un enregistreur de cap et d'un indicateur d'angle de barre qui enregistrent sur copie papier la route suivie par le navire ainsi que l'angle du gouvernail à une échelle de temps commune. D'autres appareils fournissent également des données de bord, notamment le transmetteur d'ordres fournit un relevé informatique des ordres donnés et un journal automatique fournit un relevé informatique des alarmes enregistrées.
Le pupitre de barre de la timonerie est équipé d'un volant de commande manuelle de mode asservi (FU)Note de bas de page 2, d'une manette de mode non asservi (NFU)Note de bas de page 3 et de boutons-poussoir. Il y a une autre manette NFU sur le tableau de commande principal de la timonerie. Ces commandes font partie d'un ensemble « C. Plath » intégré qui comprend entre autres l'émetteur du télémoteur, le pilote automatique, le compas gyroscopique et le compas magnétique.
Déroulement du voyage
Le 20 septembre 2001, le Cedar appareille du chantier naval Wuhu pour son voyage inaugural et fait une première escale à Fangcheng, en Chine. Le navire est chargé de bauxite, d'alumine brune et de dépôts d'alumine brune, ce qui lui donne un tirant d'eau avant de 9,27 m et un tirant d'eau arrière de 9,64 m. Le 30 septembre, il appareille de Fangcheng à destination de Québec (Québec) et de Thorold (Ontario) via le canal de Panama. Après une courte escale à Hong Kong pour faire les pleins de combustible, le navire traverse le Pacifique et transite dans le canal de Panama du 31 octobre au 3 novembre. Le 13 novembre, un pilote monte à bord au large de la station de pilotage de Les Escoumins dans le Saint-Laurent.
Le navire remonte le fleuve sous la conduite du pilote; les deux pompes de l'appareil à gouverner sont en marche. Le timonier gouverne en mode manuel à l'aide du volant FU. Le navire ne présente aucun problème de gouverne depuis son appareillage de la Chine.
Le soir du 13 novembre, le Cedar fait escale à Québec où il décharge une partie de sa cargaison d'alumine brune pour avoir un tirant d'eau avant et arrière acceptable de 7,98 m pour naviguer dans la Voie maritime. À 9 h 55 le 16 novembre, il appareille de Québec.
La remontée du fleuve se déroule sans incident; le navire file quelque 9,5 noeuds sur le fond avec un courant de jusant de 2 ou 3 noeuds. L'officier de quart, le timonier, le pilote et un apprenti-pilote se trouvent sur la passerelle. Les deux pompes de l'appareil à gouverner sont en marche et le timonier gouverne en mode manuel à l'aide du volant FU. Vers 14 h 18, alors que le navire se trouve près de Deschaillons-sur-Saint-Laurent, on donne l'ordre de venir à gauche, et le timonier met le cap au 257° (G) (Voir position 1, figure 1)Note de bas de page 4. Puis, pour compléter le virage, le pilote ordonne de venir au 248°, puis au 246° immédiatement. Le timonier met la barre à gauche à 15°, et l'avant du navire dévie rapidement sur bâbord, au-delà des 246° voulus, pour se stabiliser au 238° environ (Voir position 2, figure 1). Le timonier ayant déjà mis la barre à droite à quelque 19°, l'avant du navire commence à revenir sur tribord. Le timonier met d'abord la barre à gauche à 10°, puis à 20° pour arrêter l'abattée au 246,° le cap voulu. Le navire poursuit son évolution sur tribord et, vers 14 h 20, le timonier se rend compte que le gouvernail ne répond pas quand il met la barre à gauche.
Le pilote ordonne de mettre la barre à gauche toute, mais le gouvernail ne répond toujours pas. On essaie rapidement une manette NFU, puis l'autre, mais sans résultat. Le navire vient sur tribord, et le courant au 070° (V) est sur l'avant bâbord. À peu près à ce moment-là, le capitaine arrive sur la passerelle et on le prévient que le gouvernail ne répond pas. On ordonne de faire machine arrière toute et l'on déclenche la procédure d'arrêt en catastrophe. Avant que le moteur ait le temps d'atteindre la puissance en marche arrière, le navire sort du côté nord du chenal sur un cap au 285° environ. Alors que le navire file presque 9 noeuds et que l'avant talonne dans le chenal, le navire dévie d'environ 7° sur bâbord avant de s'immobiliser rapidement à 14 h 22. Le navire s'échoue par 46°33′48″ N et 072°07′33″ W sur un cap au 278° (position 3, figure 1), la barre à gauche toute, mais le gouvernail orienté à quelque 4° à droite.

Peu après l'échouement, l'électricien du navire se rend au compartiment de l'appareil à gouverner et place le commutateur de transfert d'urgence (photo 2) sur Emergency pour isoler la commande de l'appareil à gouverner de la timonerie. Il essaie ensuite de déplacer le gouvernail au moyen des boutons-poussoir NFU situés de chaque côté du commutateur. Le gouvernail répond normalement. Après quelques essais, l'électricien place le commutateur sur Main Bridge pour transférer la commande de l'appareil à gouverner à la timonerie. Les essais subséquents dans la timonerie confirment que le gouvernail répond bien en mode FU et NFU.
On procède au sondage des citernes qui révèle que le coqueron avant et le double-fond de ballastage no 1 tribord sont percés.
Le pilote et le capitaine s'entendent alors pour tenter de renflouer le navire sans remorqueur à la prochaine marée haute. On fait des calculs sur l'ordinateur du navire pour le ballastage du coqueron arrière et des autres citernes de ballastage à l'arrière. Le scénario du ballastage donne un moment fléchissant maximal de 88 % du maximum au couple 111.
À 19 h 30, deux inspecteurs de la Sécurité maritime de Transports Canada montent à bord. On procède à divers essais de l'appareil à gouverner et tout semble fonctionner normalement. Vers 21 h, à l'approche de la marée haute, le navire pivote sur tribord; on fait machine arrière, mais le navire reste échoué. Vers 21 h 30, après une trentaine de minutes d'application continue de la puissance en marche arrière, alors que la marée commence à descendre, le navire se dégage. On ramène le navire dans le chenal et il descend le fleuve à destination du port de Québec pour d'autres inspections et des réparations provisoires.
Appareil à gouverner
Le Cedar est équipé d'un appareil à gouverner hydro-électrique à chariot à articulation mobile (Rapson) de type RM21-040 fabriqué par Kawasaki. La commande de gouvernail est constituée de deux presses alimentées par deux pompes à débit variable (pompes principales de l'appareil à gouverner), chacune ayant son propre moteur électrique. Les pompes principales sont actionnées par un levier flottant qui peut être commandé par un des récepteurs de télémoteur hydraulique ou par les deux. Chaque récepteur de télémoteur comprend une servocommande et un vérin. Les vérins asservis, en symétrie axiale, sont raccordés au levier flottant à un point commun (figure 2).
Les servocommandes et le matériel électrique associé ont été fournis par le chantier naval. Chaque servocommande comprend un moteur électrique, une pompe hydraulique, une boîte à soupape du groupe de commande et un tuyau hydraulique de raccordement.
La boîte à soupape du groupe de commande de chaque servocommande comprend un distributeur à solénoïde et une soupape de dérivation de vérin asservi à commande hydraulique. Le solénoïde du distributeur reçoit un signal de commande à faible tension (24 V cc) de l'émetteur du télémoteur. La soupape de dérivation du vérin asservi est maintenue en position de dérivation par un ressort lorsque la pression du système est nulle (c.-à-d. que la pompe de la servocommande est arrêtée). Lorsque la pompe de la servocommande est actionnée, la pression s'accumule et libère le ressort, obstruant la dérivation et assujettissant hydrauliquement le vérin asservi correspondant.
Après l'échouement, on a constaté que les soupapes de dérivation gauche et droite étaient en place dans la boîte à soupape du groupe de commande de chaque servocommande, mais qu'elles avaient été mal installées (le distributeur à tiroir cylindrique se trouvait du même côté que la pression de la pompe hydraulique)Note de bas de page 5.
Les servocommandes gauche et droite étaient raccordées électriquement à leur propre pompe principale, de sorte que lorsqu'on sélectionnait une pompe d'appareil à gouverner (au poste de barre), la servocommande de la pompe en question était activée automatiquement. Lorsque les deux pompes principales de l'appareil à gouverner étaient sélectionnées pour fonctionner en synchronisme, les deux servocommandes fonctionnaient en tandem.
Chaque servocommande a son propre panneau de démarrage électrique qui a été fourni par le chantier naval pendant la construction. Chaque panneau de démarrage comprend un contacteur de moteur, des fusibles et un transformateur. Après l'échouement, l'interrupteur d'alimentation principale du panneau de démarrage de la servocommande gauche, même s'il demeurait opérationnel, a été trouvé en partie démonté. Un des deux boulons de fixation de cet interrupteur était desserré.
L'enquête a révélé la présence d'un fil électrique desserré à l'intérieur du commutateur de transfert d'urgence, situé dans le compartiment de l'appareil à gouverner (photo 2). Ce fil servait à la transmission du signal de commande au solénoïde du distributeur de la servocommande de droite qui commandait le déplacement du gouvernail à gauche. On a également trouvé d'autres fils desserrés à l'intérieur de ce commutateur. Les fils présentaient des signes de sertissage avec un outil autre qu'une sertisseuse appropriée.
Commande et fonctionnement de l'appareil à gouverner
Les vérins asservis reçoivent de l'huile par l'intermédiaire de leurs distributeurs à solénoïde respectifs. Lorsqu'une commande est faite à partir d'une source quelconque en mode FU ou NFU, deux signaux de commande distincts de 24 V cc sont envoyés : un à chacun des solénoïdes de distributeur des servocommandes de gauche et de droite. Ainsi, les deux distributeurs à solénoïde fonctionnent en tout temps, même si en fait une seule des servocommandes est utilisée.
En plus des deux commandes de barre FU et NFU du pupitre de barre de la timonerie, il y a également deux commandes de barre dans le compartiment de l'appareil à gouverner. Pour commander la barre en mode NFU à partir du compartiment de l'appareil à gouverner, il faut placer le commutateur de transfert à la position Emergency. On peut alors gouverner le navire en pressant les boutons NFU qui se trouvent au-dessus du commutateur. Le commutateur est équipé d'un dispositif de sécurité pour empêcher de sélectionner la position Emergency par inadvertance. Autre méthode : en cas de panne des deux servocommandes, les deux pompes principales de l'appareil à gouverner doivent être actionnées manuellement au moyen du levier flottant commandé par le volant de commande manuelle qui se trouve devant l'appareil à gouvernerNote de bas de page 6. Pour y arriver, toutefois, il faut engager le volant de commande manuelle dans le levier flottant en insérant un boulon dans la position spécifiée.
Comme le système de gouverne du navire est électrique, la passerelle est équipée d'une alarme visuelle et sonore en cas de panne de courantNote de bas de page 7. Pendant la période où le gouvernail ne répondait pas, aucune alarme n'a été entendue par l'équipe à la passerelle, et aucune alarme n'a été enregistrée par le journal automatique des alarmes de la salle de commande des moteurs.
Tuyauterie hydraulique des servocommandes

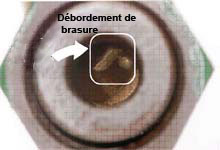
Au moment de leur installation au chantier naval, les tuyaux de raccordement des servocommandes étaient en cuivre. Les raccords de tuyauterie ont été effectués à l'aide des méthodes de brasage direct et de joints aboutés simples (photo 3). Les joints contenaient une grande quantité de brasure à l'extérieur, et le joint qui a été examiné minutieusement lors de l'enquête contenait un débordement de brasure dans le trou d'alésage interne (photo 4). On a calculé que l'obstruction devait limiter l'écoulement à quelque 70 % du débit de conception. Note de bas de page 8 Les pliures de la tuyauterie étaient non symétriques et aplaties à certains endroits, au point que, au cours des réparations effectuées après l'échouement, la Sécurité maritime de Transports Canada a exigé que toute la tuyauterie des servocommandes soit remplacée par des tuyaux d'acier pliés, ajustés et calibrés correctement.
Navire-jumeau
Le navire Pine a été construit au même chantier naval que le navire Cedar et a été livré à l'armateur grec Diana Shipping Agencies cinq mois avant le Cedar. L'inspection du Pine après l'échouement du Cedar a révélé que son appareil à gouverner était identique à celui du Cedar, sauf que :
- l'interrupteur d'alimentation principale de chaque servocommande était intact;
- la soupape de dérivation hydraulique de chacun des vérins asservis était installée correctement;
- le pliage et le brasage de la tuyauterie hydraulique en cuivre des servocommandes semblaient sensiblement mieux exécutés que celui du Cedar.
Instructions d'utilisation du volant de commande manuelle
Les instructions en cas d'urgence dans le compartiment de l'appareil à gouverner du Cedar (et du Pine) étaient gravées sur deux plaques de bronze placées l'une au-dessus de l'autre. Chaque plaque visait à expliquer l'utilisation du volant de commande manuelle :
Plaque A
- In case of handling the trick wheel, insert the pin A into the position for emergency. In other cases keep the pin A releasing from the nut. [Traduction : Pour utiliser le volant de commande manuelle, insérer la goupille A dans la position d'urgence. Autrement, maintenir la goupille A dégagée de l'écrou.]
- Don't draw out the pins B and C. [Traduction : Ne pas retirer les goupilles B et C.]
Plaque B
- Disconnect the remote steering gear control system from the power circuit. [Traduction : Déconnecter le système de gouverne.]
- Shift the pin of trick wheel to the position of for emergency. [Traduction : Mettre la goupille du volant de commande manuelle à la position d'urgence.].
- Operate the power unit by means of E/M start switch. [Traduction : Mettre en marche le groupe électrique au moyen du commutateur E/M.]
L'utilisation du volant de commande manuelle est essentielle en cas de panne des servocommandes. Comme les soupapes de dérivation des servocommandes du Cedar étaient mal installées, les vérins asservis, même lorsque les pompes ne fonctionnaient pas, demeuraient bloqués hydrauliquement au lieu de se trouver en position de dérivation. Pour que le volant de commande manuelle puisse actionner le levier flottant dans ces conditions, il fallait alors faire l'effort supplémentaire de désengager les deux vérins asservis du levier flottant.
Avaries
Le coqueron avant et le double-fond de ballastage no 1 tribord ont été perforés entre les couples 216 et 235 (sur environ 12 m) entre la tôle de quille et le bouchain de tribord. Le bordé de carène a été renfoncé de quelque 600 mm. La tôle de la quille en caisson était aussi défoncée à partir du couple 175 jusqu'au couple 185. D'autres parties du bordé de fond présentaient des avaries aussi loin à l'arrière que le couple 151; la citerne no 1 bâbord a été touchée ainsi que les citernes no 2 bâbord et tribord, les citernes no 4 bâbord et tribord, les citernes no 5 bâbord et tribord et la citerne no 7 tribord.


Analyse
Conception du système - Servocommandes jumelées
Quand on sélectionnait la pompe principale gauche de l'appareil à gouverner, on sélectionnait la servocommande gauche, et quand on sélectionnait la pompe principale droite, on sélectionnait la servocommande droite. Et quand les deux pompes principales de l'appareil à gouverner étaient en marche, les deux servocommandes fonctionnaient en tandem.
Il y a certes des avantages à utiliser simultanément les deux pompes principales de l'appareil à gouverner. Le gouvernail répond plus rapidement, et la redondance en temps réel de l'appareil à gouverner est assurée. La Convention internationale pour la sauvegarde de la vie humaine en mer (SOLAS) recommande d'ailleurs d'utiliser deux pompes principales lorsque le navire se trouve dans une zone qui demande une attention particulièreNote de bas de page 9. Par contre, il y a moins d'avantages à utiliser les deux servocommandes simultanément, et selon le système, cela peut présenter des inconvénients. Même si la redondance en temps réel est assurée, en théorie, il n'y a pas d'accélération réelle du temps de réponse du gouvernail. Dans un système comme celui du Cedar, les deux servocommandes doivent être calibrées avec précision (écoulement et pression) pour produire le même rendement à une puissance d'entrée donnée. Tout écart de rendement entre les deux servocommandes, à une puissance d'entrée donnée, entraîne une discordance entre les deux.
Pendant la période où le gouvernail ne répondait pas, les deux pompes principales de l'appareil à gouverner étaient en marche, ainsi que les deux servocommandes, de par leur conception. Après l'échouement, l'électricien du navire a placé le commutateur de transfert d'urgence sur Emergency pour transférer la commande de l'appareil à gouverner de la timonerie au compartiment de l'appareil à gouverner. Le gouvernail a alors recommencé à répondre normalement. Un examen minutieux a révélé que de nombreux fils à l'intérieur du commutateur de transfert d'urgence étaient desserrés. Un des fils desserrés servait à la transmission du signal de commande à faible tension au solénoïde du distributeur de la servocommande de droite qui commandait le déplacement du gouvernail à gauche. Entre 14 h 20 et 14 h 22, on a mis la barre à gauche pour stopper l'évolution du navire sur tribord. Une analyse des angles de gouvernail enregistrées montre que le gouvernail a répondu en brèves saccades quand on mettait la barre à gauche (figure 3). Ce fonctionnement intermittent du gouvernail s'explique par une mise en tension/hors tension du solénoïde du distributeur lorsque la barre était mise à gauche, causée vraisemblablement par le fil desserré faisant contact, puis ne faisant plus contact.
L'installation des servocommandes gauche et droite n'était pas conforme aux plans présentés au LR. Plus précisément, ces servocommandes étaient dépourvues d'un mécanisme de dérivation hydraulique opérationnel pour les vérins asservis. Comme on l'a vu précédemment, les deux solénoïdes des distributeurs de gauche et de droite sont activés quand le navire gouverne, même si une seule servocommande est utilisée. Les distributeurs à solénoïde ont donc agi comme une soupape de dérivation et ont caché le défaut d'installation des soupapes de dérivation des vérins asservis alors qu'une seule servocommande était en marche. Un défaut du solénoïde du distributeur de l'une ou l'autre des servocommandes (ou l'absence de signal de commande), qu'une seule servocommande ou que les deux soient utilisées, pouvait causer un blocage hydraulique. La mauvaise installation des soupapes de dérivation n'a pas contribué à l'échouement mais, dans d'autres circonstances, notamment si seule la servocommande gauche avait été utilisée, le défaut d'installation aurait bien pu être un facteur contributif. En outre, le défaut d'installation aurait pu avoir des conséquences si on avait gouverné à l'aide du volant de commande manuelle.
Même si la servocommande gauche fonctionnait, elle n'a pu dégager le vérin asservi de droite qui était en blocage hydraulique (il y avait bien une pression de pompe positive mais le distributeur à solénoïde se trouvait au point mort en l'absence d'un signal de commande). C'est ainsi que l'appareil à gouverner a cessé de fonctionner correctement, sans qu'une alarme ne se déclenche. La redondance, qui est en soi est une bonne chose, doit être utilisée correctement dans un système pour pouvoir répondre à l'objectif visé.
Alarmes
Vers 14 h 20, le gouvernail a cessé de répondre à la barre; pourtant, aucune alarme ne s'est déclenchée. Le timonier a alors signalé à l'équipe à la passerelle pour la première fois qu'il y avait un problème de gouverne. En succession rapide, on a essayé les deux manettes NFU du pupitre de barre, mais en vain. Même si l'alimentation électrique des deux pompes principales de l'appareil à gouverner et des pompes des servocommandes était surveillée et comprenait une alarme, il n'y avait pas d'alarme pour le signal de commande à faible tension. En principe, une alarme devrait prévenir l'utilisateur que le dispositif surveillé ne donne pas le rendement prévu. Bien souvent, l'alarme est raccordée à l'alimentation électrique - la logique étant que s'il n'y a pas de courant, il n'y a pas de rendement. C'est là aussi une exigence de la Convention SOLAS pour les systèmes de commande d'appareil à gouverner.
Dans le cas qui nous occupe, en raison du fil desserré à l'intérieur du commutateur de transfert d'urgence, le solénoïde du distributeur de droite n'a pas reçu le signal de commande à gauche, de sorte que cette servocommande n'a pas commandé le déplacement du gouvernail à gauche. Par ailleurs, le solénoïde du distributeur de gauche recevait un signal de commande à gauche mais ne pouvait actionner le vérin asservi de gauche parce que le vérin asservi de droite était bloqué hydrauliquement. Lorsque la pression hydraulique s'accumulait jusqu'au débit maximum de la pompe de la servocommande gauche, la soupape de sécurité s'ouvrait, renvoyant le fluide hydraulique dans le réservoir. Même si l'équipement de l'appareil à gouverner n'a pas rempli ses fonctions, aucune alarme ne s'est déclenchée.
Une alarme installée à la source de courant demeure la solution la plus pratique et la plus simple pour alerter l'utilisateur que le dispositif ne donne pas le rendement prévu. Le concept n'est pas infaillible, toutefois, et l'absence d'alarme dans ces circonstances ne signifie pas nécessairement que le dispositif est opérationnel. L'alarme pour le système de gouverne de l'appareil à gouverner a été installée à un point en amont d'autres points de panne possibles. Même si l'alarme était conforme aux exigences de la Convention SOLAS, toute panne en aval de ce point aurait empêcher la servocommande de fonctionner, et ce sans qu'aucune alarme ne se déclenche.
Contrôle de la qualité, essais et acceptation du système de gouverne
De nombreuses indications de travaux mal exécutés et de composantes de qualité inférieure dans le système de gouverne ont été observées, notamment en ce qui concerne les servocommandes :
- les soupapes de dérivation des vérins asservis n'étaient pas installées correctement;
- le sertissage des connexions de fil électrique était inadéquat;
- aucun plan détaillé des servocommandes n'était disponible;
- le travail de pliage, d'ajustage et de brasage pour la tuyauterie hydraulique des servocommandes laissait nettement à désirer (même si cela n'a pas contribué à l'échouement).
La plupart des éléments précités n'ont pas contribué à l'échouement, mais du fait que le Cedar faisait son premier voyage, ce n'était qu'une question de temps avant que l'un de ces facteurs ne cause un accident. Étant donné que les travaux exécutés font nécessairement l'objet d'une inspection par la société de classification et d'un contrôle par l'État du pavillon avant la mise en service du navire, on peut conclure que le contrôle de la qualité à ce niveau laissait à désirer.
Le Cedar est équipé d'un émetteur de télémoteur sophistiqué qui est relié, par l'intermédiaire d'un système de servocommandes, à un appareil à gouverner approuvé. Il y avait des plans et des devis détaillés à bord pour l'appareil à gouverner et le mécanisme de commande à distance, mais ce n'était pas le cas pour les servocommandes. Le meilleur système n'est fiable que dans la mesure de sa composante la plus faible. En conséquence, il est essentiel qu'il n'y ait aucun écart par rapport aux devis ou à la conception du matériel et de l'équipement pendant le montage. En outre, des essais adéquats et une inspection minutieuse sont essentielles pour assurer que le matériel et l'équipement sont conformes aux plans, aux devis et à l'utilisation prévue. Si le fonctionnement du volant de commande manuelle avait fait l'objet d'essais appropriés avant ou au moment de la livraison du navire, le défaut d'installation des soupapes de dérivation des vérins asservis aurait été décelé.
Le fait que la mauvaise qualité des inspections compromet la sécurité des navires et du personnel a été identifié dans d'autres rapports d'enquête du BSTNote de bas de page 10. Le contrôle de la qualité pendant la construction du navire et des normes rigoureuses de qualité pour les inspections sont des éléments essentiels de la sécurité du navire. Cela a été reconnu par l'International Association of Classification Societies (IACS) et également par les sociétés de classification elles-mêmes qui estiment jouer un rôle fondamental dans la sécurité du transport maritimeNote de bas de page 11. À cette fin, celles-ci ont mis sur pied divers programmes, notamment un programme d'inspections plus poussées (Enhanced Class Surveys) et un programme de protection qui fournit des avertissements précoces (Early Warning Systems). Les inspections à bord des navires par les inspecteurs de la société de classification doivent être exécutées selon des normes rigoureuses si l'on veut que l'objectif de leur mission soit réalisé.
Instructions d'utilisation du volant de commande manuelle
Le volant de commande manuelle du compartiment de l'appareil à gouverner du Cedar permet d'envoyer manuellement les signaux de commande à l'appareil à gouverner au moyen d'un levier flottant, ce qui permet d'assurer les mêmes fonctions que les servocommandes, en cas de panne des servocommandes. Il doit n'y avoir aucune pression à l'intérieur du circuit hydraulique de la servocommande (la pompe doit être arrêtée) et le dispositif de dérivation de chaque circuit doit fonctionner de manière à permettre le mouvement du volant de commande manuelle une fois qu'il a été engagé dans le levier flottant. Comme on l'a vu précédemment, les dispositifs de dérivation à bord du Cedar n'étaient pas opérationnels. En conséquence, le volant de commande manuelle ne pouvait être utilisé sans que les vérins asservis ne soient d'abord désengagés du levier flottant.
Il est essentiel que des instructions concises et complètes soient affichées pour permettre l'utilisation en toute sécurité de l'équipement du système de gouverne d'urgence. La Convention SOLAS donne des directives à cet égard et demande que des instructions simples pour le transfert au mode d'urgence de la commande de l'appareil à gouverner soient affichées sur la passerelle et dans le compartiment de l'appareil à gouvernerNote de bas de page 12.
Ni le Cedar ni le Pine (son navire-jumeau) ne disposaient d'instructions d'utilisation complètes et claires pour le volant de commande manuelle. La situation prête d'autant plus à confusion que les instructions d'utilisation sur les deux navires présentaient de petites différences. Les instructions étaient d'ailleurs insuffisantes pour permettre l'utilisation du volant de commande manuelle du Cedar du fait que les soupapes de dérivation n'étaient pas installées correctement. Cette situation n'a pas contribué à l'échouement, mais le fait que les instructions affichées pour l'utilisation du volant de commande manuelle étaient différentes, incomplètes et vagues sur les deux navires aurait pu gêner l'efficacité des opérations en cas d'urgence.
Faits établis
Faits établis quant aux causes et aux facteurs contributifs
- Un fil desserré à l'intérieur du commutateur de transfert d'urgence de l'appareil à gouverner a donné lieu à un signal de commande intermittent et empêché le système de gouverne de fonctionner normalement.
- La conception du système de récepteurs de télémoteurs jumelés était telle que, lors d'une utilisation simultanée, la panne d'une servocommande pouvait causer un blocage hydraulique et empêcher l'autre servocommande de fonctionner.
Faits établis quant aux risques
- Le contrôle de la qualité du montage pendant la construction et de la fonctionnalité des composantes hydrauliques et électriques des servocommandes avant la livraison a été insuffisant.
- On n'a pas effectué d'essais minutieux et complets du système de gouverne d'urgence à l'aide du volant de commande manuelle, avant la livraison ni au moment de la livraison du navire; résultat, un défaut latent dans l'appareil à gouverner n'a été décelé qu'après l'accident.
- Des instructions différentes, incomplètes et vagues pour l'utilisation du volant de commande manuelle peuvent gêner l'efficacité et la rapidité des opérations en cas d'urgence.
- L'alarme pour le système de gouverne de l'appareil à gouverner a été installée à un point en amont d'autres points de panne possibles; toute panne en aval de ce point aurait empêcher la servocommande de fonctionner, et ce sans qu'aucune alarme ne se déclenche.
- La qualité de l'exécution des travaux, les matériaux utilisés et les méthodes de pliage et de raccordement des tuyaux hydrauliques des servocommandes de ce navire neuf étaient de qualité inférieure, et ces défauts n'ont été ni relevés par la société de classification du navire ni corrigés par le service de contrôle de la qualité du chantier naval.
Mesures de sécurité
Mesures de sécurité prises
Après l'échouement, pendant que le Cedar était à quai à Québec (Québec) du 19 au 23 novembre 2001, les mesures ci-après ont été prises :
- La tuyauterie hydraulique des servocommandes a été remplacée par des tuyaux d'acier pliés et calibrés correctement. La tuyauterie a également été ajustée en vue de travaux de soudage et de brasage.
- Les interrupteurs d'alimentation principale des servocommandes de gauche et de droite ont été remplacés par des interrupteurs plus robustes.
- L'utilisation d'un seul télémoteur a été rendue possible grâce à l'installation d'un commutateur-sélecteur sur la passerelle, assurant le découplage de chaque servocommande par rapport aux pompes principales de l'appareil à gouverner.
- Les soupapes de dérivation des vérins asservis de gauche et de droite ont été réinstallées correctement.
- Des plans des servocommandes hydrauliques ont été dessinés et classés à bord.
- Toutes les connexions desserrées à l'intérieur du commutateur de transfert d'urgence situé dans le compartiment de l'appareil à gouverner ont été serties et assujetties correctement.
Le présent rapport met un terme à l'enquête du Bureau de la sécurité des transports du Canada (BST) sur cet événement. Le Bureau a autorisé la publication du rapport le .