Échouement
Vraquier Fossnes
Au large du cap Martin
Dans le fleuve Saint-Laurent
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Le 18 octobre 2000, le vraquier norvégien Fossnes remonte le fleuve Saint-Laurent en direction de Sarnia (Ontario) par temps clair et sous la conduite d'un pilote.
Vers la fin de la matinée, le timonier annonce à l'officier de quart que la barre ne répond plus. Le gouvernail s'est immobilisé à droite. On ordonne l'allure en arrière toute et on jette les deux ancres. Le navire continue à se déplacer sur son erre avant et s'échoue peu de temps après au large du cap Martin.
En soirée, le navire est renfloué avec l'assistance d'un remorqueur. Le Fossnes continue son voyage et accoste dans le port de Québec. Une inspection de la coque a révélé qu'un des ballasts était perforé. L'accident n'a pas fait de pollution.
Renseignements de base
| Nom | « FOSSNES » |
|---|---|
| Numéro officiel | 8908868 |
| Port d'immatriculation | Bergen (Norvège) |
| Pavillon | Norvège |
| Type | Vraquier |
| Jauge bruteNote de bas de page 1 | 11 542 |
| Longueur | 149,44 m |
| Tirant d'eau | av.Note de bas de page 2 : 8,0 m ar. : 8,0 m |
| Cargaison | 14 105 tonnes de nitrate de calcium |
| Équipage | 19 personnes |
| Construction | Stocznia Szczecinska, Szczecin (Pologne) |
| Groupe propulseur | Un moteur diesel lent B & W, 4S50MC, de 5 720 kW et entraînant une hélice à pas fixe |
| Propriétaires | Aboitiz Jebsen Ship Management (Norvège) |
Renseignements sur le navire
Le Fossnes est un vraquier conçu pour transporter des marchandises diverses. La timonerie, les emménagements et la salle des machines sont situés derrière les quatre cales à cargaison. Les cales sont desservies par deux grues portiques d'une capacité de 25 tonnes chacune. À l'arrière du navire, on retrouve une embarcation de sauvetage complètement fermée, pouvant accueillir 27 personnes, avec mise à l'eau en chute libre.
Le navire, qui fut lancé le 25 février 1995, était classé au Lloyd's Register of Shipping. Il faisait l'objet de certificats délivrés en vertu de la réglementation norvégienne et des conventions internationales de l'Organisation maritime internationale (OMI) incluant, entre autres, la Convention internationale pour la sauvegarde de la vie humaine en mer (SOLAS). Le navire était exploité conformément au Code international de gestion de la sécurité (ISM).
Déroulement du voyage
Le 7 octobre 2000, le navire Fossnes appareille de Sagunto en Espagne avec un chargement de 14 105 tonnes d'engrais à destination de Sarnia (Ontario).
Le 18 octobre, vers 7 h 5Note de bas de page 3, au large de la station de pilotage de Les Escoumins, un pilote embarque à bord du Fossnes pour accomplir son affectation jusqu'à Québec. Les deux groupes moteurs de l'appareil à gouverner sont en marche et le timonier gouverne la barre en mode de commande asservi (follow-up ou FU).
Vers 8 h, dans le cadre de la relève dans la salle des machines, le chef mécanicien relève le premier mécanicien. De temps en temps, le capitaine monte sur la passerelle pour s'assurer de la bonne marche du navire et, vers 11 h 30, il quitte la timonerie pour aller déjeuner. Après avoir fait un changement de cap au large de Cap-aux-Oies, le navire fait route à une vitesse sur le fond de 10 noeuds, cap au 243º G. En utilisant la technique de navigation par repères parallèles, le pilote ajuste l'alidade électronique à 6 encablures pour doubler le cap Martin.
À 11 h 38, une alarme de l'appareil à gouverner se déclenche sur la passerelle. L'officier de quart observe qu'une lampe témoin rouge reliée au groupe moteur non01 est allumée. Il annule l'alarme sonore et arrête la pompe no 1.
Par la suite, l'officier de quart téléphone au chef mécanicien dans la salle de contrôle de la salle des machines pour l'aviser de la panne. Le chef mécanicien rappelle l'officier de quart et lui demande de redémarrer la pompe no 1, puis il se rend dans le local de l'appareil à gouverner. L'officier de quart essaie à deux reprises de démarrer la pompe, mais en vain; chaque fois l'alarme se déclenche. Entre temps, le chef mécanicien demande l'assistance de l'électricien. Quelques minutes plus tard, l'électricien rejoint le chef mécanicien qui l'informe de la panne. Le chef mécanicien demande à l'officier de quart de redémarrer la pompe no 1. Lors du démarrage, l'électricien remarque que l'ampèremètre du moteur indique une intensité de courant très élevée. Vers 11 h 46, l'électricien demande au chef mécanicien d'arrêter immédiatement la pompe sur place. En essayant de faire tourner manuellement le rotor, il constate que le moteur électrique tourne librement. Il inspecte ensuite le tableau de démarrage no 1. En appuyant sur le contacteur du moteur électrique, il constate qu'il offre une résistance mécanique élevée.
Vers 11 h 54, le pilote donne l'ordre au timonier de gouverner au 250º G. Le timonier met la barre à droite et amorce les manoeuvres pour maintenir le cap. À peu près au même moment, l'électricien, qui se trouve toujours dans le local de l'appareil à gouverner, essaie de démarrer manuellement la pompe no 1 en actionnant le contacteur. Après quelques tentatives, des étincelles jaillissent du contacteur.
Alors que la barre est tournée d'environ 7º vers la droite, le timonier constate qu'elle ne répond plus. Aussitôt, une alarme sur la console de commande de barre se déclenche et une lampe témoin bleue s'allume, indiquant une perte d'alimentation électrique dans le circuit de contrôle de commande FU.
Le pilote ordonne à l'officier de quart d'effectuer un arrêt d'urgence. Le deuxième officier, qui vient d'arriver sur la passerelle pour prendre la relève du quart, met le transmetteur d'ordres à la position stop, puis à l'allure en arrière toute. Le troisième officier se précipite alors vers le gaillard d'avant. Le capitaine qui a entendu le changement d'allure en manoeuvre se précipite de sa cabine à la timonerie. Après avoir évalué la situation, le capitaine remet le levier du transmetteur d'ordres à la position stop, puis il augmente peu à peu l'allure de en arrière très lentement à en arrière toute à 11 h 58.Note de bas de page 4
Après avoir entendu le changement d'allure en manoeuvre, le chef mécanicien se rend rapidement à la salle de contrôle où il constate que la machine principale est à en arrière toute. Il appelle aussitôt la passerelle qui l'informe que la barre ne répond plus et que le navire se dirige vers la rive.
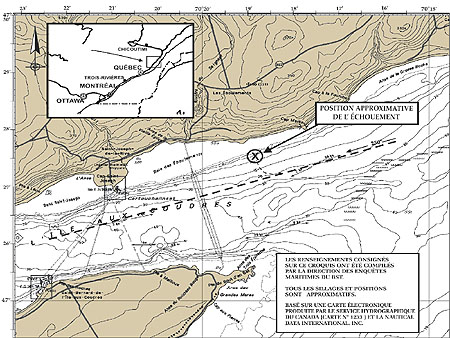
On jette les deux ancres mais le navire poursuit son embardée vers tribord et, à 12 h 1, le navire s'échoue par 47º 27' 48" de latitude nord et 070º 17' 54" de longitude ouest, à environ 2 encablures au sud-ouest du cap Martin.
La vitesse du jusant est estimée à 3,5 noeuds portant au 070º V. Un vent léger souffle du secteur est.
Le pilote avise les Services de communications et de trafic maritimes (SCTM) de Québec que le navire vient de s'échouer, et le capitaine demande qu'un remorqueur assiste le navire dans les plus brefs délais.
Pendant la pleine mer vers 20 h 25, le Fossnes est renfloué avec l'assistance du remorqueur Ocean Delta qui l'escorte ensuite jusqu'au poste d'amarrage no 27 dans le port de Québec.
Renseignements supplémentaires
Le pilote a indiqué qu'il se rappelle avoir entendu des alarmes mais qu'il ne se rappelle pas avoir essayé d'identifier les avertissements. L'officier de quart aurait avisé le pilote qu'un des groupes moteurs était en panne et que l'appareil à gouverner ne fonctionnait que sur une pompe. Cependant, le pilote aurait compris que les alarmes n'étaient pas importantes.
Aucune alarme reliée au groupe moteur no 2 n'a été enregistrée par l'enregistreur d'alarmes. Outre le disjoncteur principal du groupe moteur no 1 du tableau d'urgence, aucun disjoncteur n'a été trouvé en position ouverte.
Entre 11 h 46 et 11 h 56 environ, le chef mécanicien et l'électricien, qui se trouvaient alors dans le local de l'appareil à gouverner, n'ont remarqué aucune défaillance du groupe moteur no 2 et le gouvernail semblait répondre normalement à la barre.
Après l'échouement, une panne qui a été simulée en présence d'inspecteurs de Transports Canada a révélé que l'appareil à gouverner pouvait continuer à fonctionner après un transfert du mode de commande FU au mode non asservi (non-follow-up ou NFU).
Avaries au navire
Une inspection sous-marine a révélé que la virure de bouchain bâbord avait été gauchie et perforée au droit des couples nos 121 à 125. De plus, la virure du bordé de fond bâbord adjacente à la virure de bouchain était enfoncée au droit des couples nos 123 à 125. La virure de bouchain tribord avait été gauchie et fracturée au droit du couple no 110. On a fait la réparation en cale sèche.
Transmetteur d'ordres
La machine principale est un moteur diesel lent, réversible, fabriqué par Burmeister & Wain, modèle 4S50MC, développant 5 720 kW à 123 tours par minute (tr/min). Le moteur entraîne une hélice à pas fixe et est équipé d'un système de contrôle AutoChief 4, modèle AC-4, fabriqué par NorControl. La machine principale peut être commandée à distance à partir de la passerelle ou de la salle de contrôle dans la salle des machines.
Le modèle, AC-4, est équipé de la fonction d'arrêt d'urgence. L'arrêt d'urgence est activé lorsque le levier du transmetteur d'ordres sur la passerelle passe directement d'une allure en avant supérieure à 26 tr/min, à l'allure en arrière toute, sans qu'il soit momentanément immobilisé à la position stop. Une lampe témoin sur le pupitre au droit du transmetteur d'ordres s'allume quand le système est activé et elle s'éteint quand la machine principale commence à se renverser. De l'allure en avant toute, des essais démontrent que cette manoeuvre s'effectue en 135 secondes.
Les essais en mer ont démontré qu'en arrêt d'urgence il était possible de casser l'erre du navire en 4 minutes et 49 secondes. Cette information était affichée sur une des cloisons de la timonerie.
Appareil à gouverner
L'appareil à gouverner est de type électro-hydraulique à deux presses. Il a été fabriqué par Hydroster en Pologne. Composé de deux groupes moteurs identiques, il développe un couple de 320 kNm.
Les groupes moteurs no 1 et no 2 étaient alimentés respectivement à partir du tableau de distribution de secours et du tableau principal. Chaque artère d'alimentation était raccordée au tableau de distribution par un disjoncteur triphasé à double protection fabriqué par Klockner Moeller, modèle NZMS4-63 .
La protection de surintensité (long retard) et de court-circuit (court retard) du disjoncteur du groupe moteur no 1 était réglée respectivement à 55 A et 550 A.
Environ deux mois avant l'échouement, le groupe moteur no 1 était tombé en panne lors d'un essai de l'appareil à gouverner avant l'appareillage. Après une inspection sommaire du circuit, le disjoncteur principal alimentant l'artère de ce groupe moteur avait été découvert en position ouverte.
Contacteur du moteur du groupe moteur no 1
Les tableaux de démarrage des deux groupes moteurs, qui étaient installés dans le local de l'appareil à gouverner, étaient identiques. Un sélecteur rotatif fixé sur le couvert des tableaux permettait de choisir le lancement à partir de la passerelle ou du local de l'appareil à gouverner.
Le démarreur du moteur du groupe moteur no 1 avait un contacteur triphasé, modèle SLA 85, fabriqué par Elester. Le démarreur était composé d'un boîtier en plastique moulé contenant un entrefer fixe et un entrefer mobile. On retrouvait au centre du boîtier une bobine électrique munie d'une série de contacts à chacune de ses extrémités. Quand la bobine était hors tension, l'entrefer mobile était retenu à distance de l'entrefer fixe par quatre ressorts de compression. En mettant la bobine sous tension, l'entrefer mobile se rabattait sur l'entrefer fixe. Ceci fermait le circuit entre la source d'alimentation et le moteur électrique.
Après l'échouement, on a remarqué que les surfaces de contact de chacune des phases présentaient des brûlures d'arc mais qu'elles étaient endommagées de façon non uniforme. De plus, la pièce mobile se rabattait avec difficulté sur la pièce fixe, empêchant un bon contact.
Une inspection du disjoncteur principal, du moteur électrique et du câblage du circuit de puissance n'a révélé aucune anomalie. Un essai de résistivité effectué avec un mégohmmètre sur l'artère du groupe moteur et sur le moteur électrique n'a révélé aucune résistance inférieure à 1000 mégaohms.Note de bas de page 5
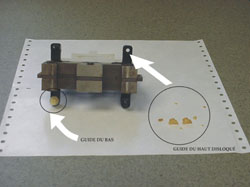
Des morceaux de polymère jaunâtre, provenant de l'un des guides de ressort, étaient éparpillés dans le boîtier du contacteur et un des guides était disloqué (Photo 1). Le polymère peut se détériorer s'il est exposé longtemps aux produits chimiques, à la chaleur, au froid, aux contraintes, aux rayons solaires, à l'oxygène, à l'humidité ou aux polluants contenus dans l'atmosphère. Tous ces facteurs, soit individuellement ou combinés, modifient la composition chimique de la matière. La fragilisation en surface, le jaunissement, le craquement, la perte d'élasticité et de robustesse sont tous des signes de détérioration chimique.
Une inspection du contacteur du groupe moteur no 2 a permis de constater que l'un des guides de ressort était également cassé et démontrait une détérioration chimique. La durée de fonctionnement des deux contacteurs était à peu près la même.
Le contacteur de la pompe de graissage no 2 de la machine principale avait également un guide de ressort disloqué.
Commande de l'appareil à gouverner

Tableaux d'alarme de l'appareil à gouverner
Il y a deux tableaux d'alarme pour l'appareil à gouverner : un sur un pupitre sur la passerelle et l'autre dans le local de l'appareil à gouverner. Sur chacun de ces tableaux, on retrouve des lampes témoins et des interrupteurs pour les deux groupes moteurs. Sur le tableau de la passerelle, il y a des interrupteurs de démarrage et un rhéostat d'éclairage de lampes témoins. Une lampe témoin blanche et une lampe témoin verte indiquent respectivement la mise sous tension du circuit force et du groupe moteur. Les tableaux d'alarme sont également munis d'un avertisseur-vibreur.
Unité centrale de traitement
Chaque groupe moteur est muni d'une unité centrale de traitement reliée à l'installation d'alarme sur la passerelle, dans la salle des machines et dans le local de l'appareil à gouverner. Lorsque les circuits électriques qui alimentaient les unités centrales de traitement étaient mis hors tension, les lampes témoins sur les tableaux d'alarme du local de l'appareil à gouverner et de la passerelle s'éteignaient. Cependant, la mise hors tension des unités centrales de traitement n'affecte pas le fonctionnement des groupes moteurs de l'appareil à gouverner.
Le plan intitulé Steering Gear Electric Diagram, B570-DZ/614-1-1, en date du 14 septembre 1994, montre que l'unité centrale de traitement no 1 s'alimentait à partir du tableau de distribution d'urgence via la boîte de distribution 220 V - 2EL et que l'unité centrale de traitement no 2 s'alimentait à partir du tableau de distribution principal via la boîte de distribution 220 V - 2L. Contrairement à ce qui est indiqué sur le plan susmentionné, l'alimentation des unités centrales de traitement provenait seulement du tableau de distribution d'urgence.
Indicateurs d'angle de barre
Il y a cinq indicateurs d'angle de barre à bord : quatre sur la passerelle et un dans le local de l'appareil à gouverner. Les cinq indicateurs étaient reliés au même circuit électrique qui était alimenté par deux sources différentes. Il y avait un commutateur pour le choix d'alimentation provenant du tableau principal ou de celui d'urgence. Un troisième choix permettait de sélectionner l'alimentation à partir du tableau principal; en cas de panne électrique, un relais transférait automatiquement l'alimentation au tableau d'urgence. Au moment de la panne, le commutateur avait été tourné vers ce troisième choix.
Réglementation relative à l'appareil à gouverner
Sous la rubrique « Installation de machines », chapitre II-1, règle 29, paragraphe 8 de la Convention SOLAS (édition consolidée de 1992), on stipule :
Tout dispositif de commande de l'appareil à gouverner principal ou de l'appareil à gouverner auxiliaire qui est actionné à partir de la passerelle de navigation doit satisfaire aux dispositions suivantes :
[8.1] lorsqu'il est électrique, il doit être desservi par son propre circuit distinct alimenté par un circuit force de l'appareil à gouverner à partir d'un point situé à l'intérieur du local de l'appareil à gouverner, ou directement par des barres du tableau de distribution alimentant ce circuit force en un endroit du tableau adjacent à l'alimentation du circuit force de l'appareil à gouverner.
[8.5] seule la protection contre les courts-circuits doit être assurée pour les circuits d'alimentation des dispositifs de commande de l'appareil à gouverner.
Sous la rubrique « Installation de machines », chapitre II-1, règle 30, paragraphe 3 de la Convention SOLAS, on stipule :
Les circuits et moteurs précités doivent être protégés contre les courts-circuits et équipés d'une alarme de surcharge. Les dispositifs de protection contre les surintensités, y compris les courants de démarrage, lorsqu'il en existe, doivent entrer en action lorsque le courant est au moins égal au double du courant à pleine charge du moteur ou du circuit protégé et être conçus de manière à laisser passer les courants de démarrage appropriés.
Analyse
Communication sur la passerelle
L'officier de quart est le représentant du capitaine et il est responsable en tout temps de la sécurité du navire. Il doit s'assurer que le navire fait l'objet d'une veille visuelle et auditive efficace en tout temps. L'alarme reliée au groupe moteur no 1 de l'appareil à gouverner s'est déclenchée à quatre reprises. Même si les alarmes peuvent se déclencher souvent sur la passerelle, toutes les alarmes sans exception doivent être sondées pour déterminer la source de la panne.
L'officier de quart a indiqué avoir informé le pilote dès que la première alarme s'est déclenchée sur la passerelle. Par contre, le pilote affirme ne pas en avoir été informé. Or, il incombe au personnel navigant de s'assurer que le pilote a bien compris tous les renseignements concernant la conduite du navire. Cela permet à l'équipe de la passerelle d'analyser la situation et de prendre les décisions qui sont nécessaires pour la bonne conduite du navire. Ainsi, tout changement imprévu qui peut changer la façon dont la navigation est planifiée et exécutée peut être remis en question par tous les membres de l'équipe de la passerelle.
La gestion des ressources à la passerelle consiste essentiellement à faire un usage judicieux de toutes les ressources disponibles pour assurer la navigation en toute sécurité.
Installation de contrôle d'arrêt d'urgence
L'installation de contrôle d'arrêt d'urgence est composée, entre autres, d'un système informatisé qui permet de maximiser le rendement de changement d'allure en manoeuvre en cas d'urgence tout en prévenant la surcharge des composantes connexes à la machine principale.
Dans les instants qui ont suivi la panne de l'appareil à gouverner, le levier du transmetteur d'ordres a été placé à la position stop et par la suite à en arrière toute. La machine principale a mis 155 secondes pour stopper et pour se renverser. Cependant, si on avait déplacé le levier du transmetteur d'ordres de façon à utiliser l'installation de contrôle d'arrêt d'urgence, la machine principale se serait arrêtée au bout de 135 secondes, soit environ 20 secondes plus vite.
Le temps de réponse de la machine principale en cas d'urgence était affichée sur la passerelle, mais le personnel navigant ne savait pas comment opérer le système AutoChief 4. Les directives se trouvaient dans le manuel d'exploitation. En l'occurrence, écourter le temps d'arrêt de 20 secondes n'aurait pas empêché l'événement de se produire. Cependant, une bonne connaissance du mode d'emploi des composantes du navire développe la confiance de l'utilisateur et optimise l'exploitation.
Transfert de modes de commande de l'appareil à gouverner
Le personnel navigant semblait bien connaître l'équipement de navigation, entre autres, l'installation de commande de l'appareil à gouverner et la procédure à suivre en cas d'urgence. En cas de panne de gouvernail à bord du Fossnes, le personnel navigant devait passer d'un mode de commande à l'autre, en l'occurrence, du mode de commande FU au mode de commande NFU.
Le mode de commande NFU aurait été sélectionné dans les instants qui ont suivi la panne du gouvernail, mais ce transfert de mode n'aurait pas donné le résultat escompté. L'enquête a démontré que le groupe moteur no 2 fonctionnait lors de l'événement. De plus, le groupe moteur no 2 n'a provoqué le déclenchement d'aucune alarme, et le disjoncteur du circuit no 2 ne s'est pas ouvert. Quand le chef mécanicien et l'électricien sont arrivés, ce groupe moteur fonctionnait normalement. Par conséquent, le mode de commande NFU aurait dû être opérationnel durant l'événement.
Puisque le navire était à faible distance de la rive, le personnel navigant devait corriger rapidement la situation. Il est possible qu'il y ait eu un transfert de mode de commande mais que le personnel navigant ne l'ait pas maintenu au mode NFU assez longtemps. Un certain temps doit s'écouler pour que l'installation soit lancée et pour que le navire réponde au changement d'angle de gouvernail. Le gouvernail est demeuré à droite, et malgré les efforts déployés, le navire s'est échoué.
En outre, si l'installation de l'indicateur d'angle de barre avait été affectée par la panne électrique, le transfert d'alimentation aurait été automatique étant donné que le commutateur avait été tourné à la position no 3. L'installation de commande de l'appareil à gouverner n'a pas cette protection, et cela n'est pas obligatoire en vertu de la Convention SOLAS.
Installation électrique de l'appareil à gouverner
Comme le circuit de commande de l'appareil à gouverner est connecté à la sortie du disjoncteur principal du circuit force d'un groupe moteur, l'ouverture de ce disjoncteur coupe l'alimentation à tous les circuits qui y sont raccordés.
Le circuit d'alimentation de commande de l'appareil à gouverner du navire répondait aux exigences de la Convention SOLAS. Toutefois, tout en étant conforme, le point où l'alimentation était prise et l'endroit où le dispositif de surcharge était installé font qu'une panne imprévue de l'installation de commande en mode FU et NFU peut survenir. Un essai a permis de déterminer que l'ouverture soudaine du disjoncteur principal provoque une perte d'alimentation dans l'artère du groupe moteur no 1 et provoque ainsi une panne de la commande en mode FU (Figure 1).
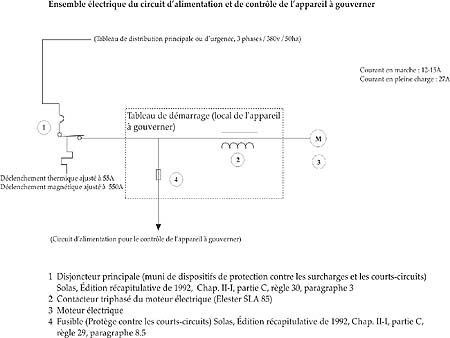
Pour protéger l'artère d'alimentation, le disjoncteur principal du groupe moteur no 1 est muni de deux dispositifs de protection, un contre les courts circuits et l'autre contre les surintensités. Ces deux types de protection sont permis en vertu de la Convention SOLAS. Les résultats de l'essai effectué après l'échouement avec un mégohmmètre sur les composantes électriques du groupe moteur no 1 n'ont révélé aucun signe de court-circuit. Tout porte à croire que le mauvais fonctionnement du mécanisme de fermeture du contacteur du moteur du groupe moteur, combiné au courant de démarrage élevé suite aux démarrages successifs, ont favorisé une surintensité supérieure à celle calibrée en long retard. Par conséquent, cette surintensité excessive a provoqué l'ouverture du disjoncteur principal.
Le mauvais fonctionnement du contacteur est attribuable à la présence des petits morceaux de polymère qui ont affecté l'action mécanique du contacteur. La détérioration du polymère utilisé pour la confection du guide de ressort démontre l'importance d'assurer un suivi de l'état des pièces et l'environnement dans lequel la pièce est conçue pour être utiliséeNote de bas de page 6. La dégradation du polymère a contribué à diminuer la durée de vie théorique du contacteur et à causer une surintensité dans le circuit d'alimentation. Étant donné que les trois contacteurs examinés présentaient la même défectuosité, il y a lieu de s'interroger sur le choix des contacteurs utilisés à bord.
Unité centrale de traitement
L'enquête a révélé que, même s'il n'a joué aucun rôle dans l'événement, le câblage des unités centrales de traitement n'était pas conforme au câblage sur les plans. Les plans indiquent que chaque unité centrale de traitement doit posséder son propre circuit d'alimentation électrique afin que chaque système soit un système indépendant. Le navire avait été câblé de sorte que les deux unités centrales de traitement n'avaient qu'une seule source d'alimentation électrique. En conséquence, quand cette source a été compromise, la redondance du système a également été compromise.
Faits établis
Faits établis quant aux causes et aux facteurs contributifs
- L'ouverture soudaine du disjoncteur principal a provoqué une perte d'alimentation dans l'artère du groupe moteur no 1 et a causé la panne de la commande en mode asservi (FU).
- Au moment de la panne, la barre était à droite. Les efforts déployés par le personnel navigant n'ont pas permis de rétablir la commande de l'appareil à gouverner.
Faits établis quant aux risques
- Le point où l'alimentation est prise, ainsi que l'endroit où est installé le dispositif de surcharge, peuvent causer une panne imprévue du système de commande.
- La détérioration du polymère utilisé pour la confection du guide de ressort a contribué au mauvais fonctionnement du contacteur.
- Une meilleure connaissance de l'installation de contrôle d'arrêt d'urgence de la machine principale aurait permis au personnel navigant d'activer une poussée arrière plus tôt.
Autres faits établis
Une panne d'alimentation au niveau du tableau de distribution d'urgence désactive toutes les alarmes du circuit de l'appareil à gouverner.
Mesures de sécurité
Mesures de sécurité prises
La lettre d'information sur la sécurité maritime numéro 01/01 concernant la défectuosité du contacteur a été envoyée au propriétaire avec copie conforme au fabricant, à l'Administration de l'immatriculation, au chantier maritime et à l'Association internationale des sociétés de classification. Après avoir fait l'essai de nouveaux produits en 1997, le fabricant Hydroster avait décidé d'utiliser d'autres types de contacteurs.
La lettre d'information sur la sécurité maritime numéro 08/01, concernant l'inadéquation dans les règles de la Convention SOLAS relatives aux installations électriques de l'appareil à gouverner, a été envoyée à Transports Canada pour que ce ministère intervienne auprès de l'Organisation maritime internationale, si cela s'avérait nécessaire.
La lettre d'information sur la sécurité maritime numéro 09/01, concernant les connexions des unités centrales de traitement qui ne sont pas conformes au plan approuvé, a été envoyée au propriétaire avec copie conforme à l'État du port et à la société de classification.
Le présent rapport met fin à l'enquête du Bureau de la sécurité des transports sur cet accident. Le Bureau a autorisé la publication du rapport le .
Annexes
Annexe A - Croquis du secteur de l'événement
Annexe B - Information provenant de l'enregistreur de données de la machine principale
| HeureNote de bas de page 7 | AllureNote de bas de page 8 | tr/minNote de bas de page 9 |
|---|---|---|
| 7 h 21 min 32 s | en avant toute | 120 |
| 11 h 55 min 49 s | stop | 85 |
| 11 h 56 min 00 s | en arrière toute | 56 |
| 11 h 56 min 44 s | stop | 55 |
| 11 h 56 min 48 s | en arrière très lentement | 49 |
| 11 h 57 min 02 s | en arrière lentement | 42 |
| 11 h 57 min 34 s | en arrière demie | 37 |
| 11 h 57 min 46 s | en arrière très lentement | 34 |
| 11 h 58 min 46 s | en arrière lentement | -52 |
| 11 h 58 min 52 s | en arrière demie | -63 |
| 11 h 58 min 56 s | en arrière toute | -71 |
| 12 h 00 min 28 s | en arrière demie | -97 |
| 12 h 00 min 36 s | en arrière lentement | -87 |
| 12 h 01 min 00 s | stop | -53 |
Annexe C - Sigles et abréviations
- A
- ampère(s)
- ar.
- arrière
- av.
- avant
- FU
- asservi (Follow-up)
- h
- heure(s)
- kNm
- kilonewton mètres
- kW
- kilowatt(s)
- MΩ
- mégohm(s)
- m
- mètre(s)
- min
- minute(s)
- NFU
- non asservi (Non-Follow-up)
- OMI
- Organisation maritime internationale
- s
- seconde(s)
- SCTM
- Services de communications et de trafic maritimes
- SI
- Système international (d>unités)
- SOLAS
- Convention internationale pour la sauvegarde de la vie humaine en mer
- tr/min
- tour(s) par minute
- UTC
- temps universel coordonné
- V
- volt(s)
- °
- degré(s)
- °G
- degré(s) au gyro-compas
- °V
- degré(s) vrai(s)
- ′
- minute(s)
- "
- seconde(s)