Échouement
pétrolier-chimiquier Halit Bey
Grondines (Québec)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
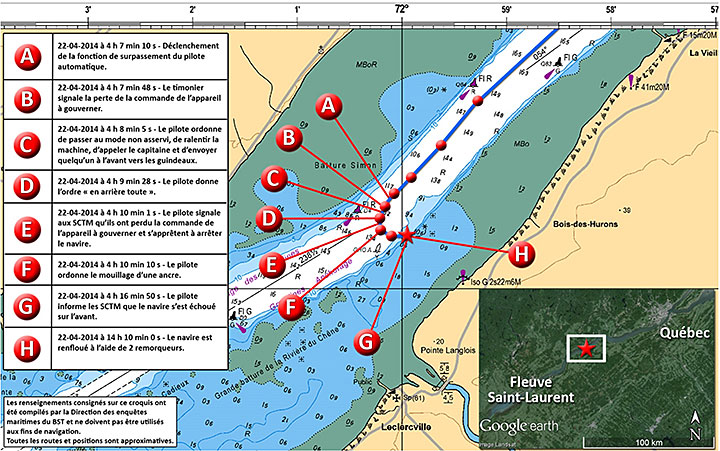
Le 22 avril 2014, le pétrolier-chimiquier Halit Bey remontait le fleuve Saint-Laurent, sous la conduite d'un pilote, lorsqu'il a subi une perte de la commande de l'appareil à gouverner. Le navire a viré à bâbord, a quitté le chenal de navigation et s'est échoué sur la rive sud du fleuve près de Grondines (Québec), à 4 h 16, heure avancée de l'Est. Le navire a été renfloué par la suite à l'aide de 2 remorqueurs. Il n'y a eu ni dommage, ni blessure, ni pollution.
Renseignements de base
Fiche technique du navire
| Nom du navire | Halit Bey |
|---|---|
| Numéro de l'Organisation maritime internationale (OMI) | 9410143 |
| Port d'immatriculation | Majuro |
| Pavillon | Îles Marshall |
| Type | Pétrolier-chimiquier |
| Jauge brute | 12 619 |
| LongueurNote de bas de page 1 | 161,65 m |
| Tirant d'eau au moment de l'accident | À l'avant : 9,7 m À l'arrière : 9,7 m |
| Construction | 2009, Türker Gemi Yapim Sanayi Ve Ticaret A.Ş., Basiskele, Turquie |
| Propulsion | Un moteur diésel semi-rapide à quatre temps (6300 kW à 500 tr/min) entraînant une hélice à pas variable |
| Cargaison | Engrais liquide (11 780 tonnes métriques d'urée-nitrate d'ammonium [32 %] et 6720 tonnes métriques d'urée ultra pure [32,5 %]) |
| Membres d'équipage | 18 |
| Propriétaire enregistré-gestionnaire | V.B.G. Denizcilik Sanayi Ticaret A.Ş., Turquie |
Description du navire
Le Halit Bey est un navire-citerne à double coque conçu pour transporter des produits chimiques liquides et des produits pétroliers en vrac. Il est fait d'acier et compte 20 citernes à cargaison et 2 citernes à résidus qui sont chargées et déchargées par des pompes centrifuges immergées. La salle des machines et les quartiers d'équipage se trouvent à l'arrière (photo 1). Le navire est aussi équipé d'un propulseur d'étrave de 800 kW.

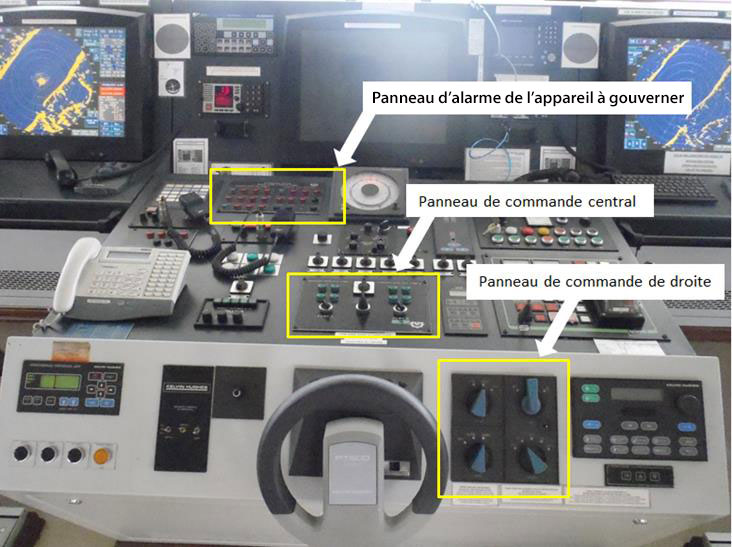
Le pupitre de commande principal de la passerelle, qui est installé sur l'axe longitudinal du navire, comprend la roue de gouvernail (ou barre), les commandes de la machine principale et les commandes du propulseur d'étrave. Le gouvernail du navire peut être opéré à partir de 2 panneaux de commande de l'appareil à gouverner, l'un installé sur le pupitre principal de la passerelle (appelé ci-après panneau de commande central) devant la roue de gouvernail, et l'autre (appelé ci-après le panneau de commande de droite) à droite de la roue de gouvernail.
Le pupitre principal de la passerelle comprend également l'équipement de navigation suivant : 1 échosondeur, 1 système électronique de visualisation des cartes marines (SEVCM), 2 radars avec fonction d'aide de pointage radar automatique, 1 système de localisation GPS, 1 système d'identification automatique (SIA)Note de bas de page 2, et 2 radiotéléphones très haute fréquence (VHF). La table des cartes et la console du système mondial de détresse et de sécurité en mer (SMDSM) se trouvent derrière le pupitre principal, respectivement du côté bâbord et du côté tribord de la passerelle de navigation.
Déroulement du voyage
Le 9 avril 2014, le Halit Bey a quitté Sluiskil (Pays-Bas) chargé de 18 500 tonnes métriques d'engrais liquide. Un déchargement partiel de la cargaison était prévu à Trois-Rivières (Québec) et le reste de la marchandise devait être déchargé à Valleyfield (Québec) (annexe A). À 0 h 15Note de bas de page 3 le 22 avril, le navire a atteint la station de pilotage de Québec (Québec) et a pris à son bord 2 pilotes et 1 apprenti pilote. Les pilotes ont demandé la fiche de pilotage et ont ensuite informé le capitaine que certains renseignements sur la fiche étaient inexacts ou incomplets.
Une fois les pilotes à bord, le navire a remonté le fleuve Saint-Laurent et, à 3 h 54, a réduit sa vitesse à 4,8 nœuds pour laisser passer 2 autres navires. L'équipe à la passerelle se composait alors d'un timonier, d'un officier de quart, du chef mécanicien, d'un élève-officier de pont qui assistait l'officier de quart, des 2 pilotes et de l'apprenti pilote. Après le passage des 2 navires, le pilote qui avait la conduite du Halit Bey a ordonné de mettre le transmetteur d'ordres en position en avant toute; il a été réglé entre 65 et 70 % de la puissance maximale continue de la machine conformément aux ordres permanents du chef mécanicien. Le timonier était au pupitre de commande principal et utilisait la barre pour gouverner le navire. Le panneau de commande central, qui se trouvait directement devant le timonier, était en mode pilotage automatique et le panneau de commande de droite était en mode asserviNote de bas de page 4.
À 4 h 7, le navire s'approchait de Grondines (Québec) (annexe A) suivant une route fond de 221° avec le gouvernail en position médiane, lorsqu'un témoin lumineux du panneau d'alarme de l'appareil à gouverner s'est allumé et qu'une alarme sonore a retenti sur la passerelle. Le chef mécanicien a demandé à l'officier de quart d'identifier la source de l'alarme et ce dernier a confirmé qu'il s'agissait de l'alarme de surpassement du pilote automatique. Peu après cette conversation, le navire a commencé à virer sur bâbord, vers la rive sud du fleuve, et le timonier a signalé que la barre ne répondait plus. Le pilote qui avait la conduite du navire a ordonné à l'officier de quart de passer au mode de gouverne non asserviNote de bas de page 5 et de ralentir le régime de la machine; de demander au capitaine de venir sur la passerelle et d'affecter quelqu'un à la préparation des ancres à l'avant.
Une fois le système de gouverne placé en mode non asservi, l'officier de quart, le chef mécanicien et le timonier ont tous tenté d'utiliser le commutateur de commande de barre en mode non asservi du panneau de commande de droite pour actionner le gouvernail, mais sans succès. Ils ont ensuite essayé de basculer d'un mode de gouverne à l'autre au moyen des sélecteurs sur ce même panneau de commande, mais le gouvernail n'a toujours pas répondu. À 4 h 9, le pilote a ordonné de faire passer la machine à demi-vitesse arrière.
Le capitaine est arrivé sur la passerelle peu de temps après et a lui aussi tenté d'actionner le gouvernail au moyen du commutateur de commande de barre en mode non asservi. Ses efforts étant vains, le capitaine a ordonné à l'officier de quart et au maître d'équipage de se rendre à la station d'amarrage avant pour le déploiement d'urgence des ancres. À ce moment, le pilote a donné l'ordre « en arrière toute ». Le navire s'approchait alors de la limite extérieure du chenal de navigation.
À 4 h 10, l'autre pilote à bord a informé les Services de communications et de trafic maritimes (SCTM) Québec que le Halit Bey avait perdu la commande de l'appareil à gouverner et qu'ils s'apprêtaient à arrêter le navire. La vitesse sur le fond était alors de 5,7 nœuds. Environ 10 secondes plus tard, le pilote qui avait la conduite du navire a ordonné de mouiller l'ancre et, moins de 2 minutes plus tard, d'arrêter la machine. Le capitaine a confirmé, à 4 h 12, que l'ancre de tribord avait été jetée. L'alarme de surpassement du pilote automatique, qui se faisait toujours entendre, a été réarmée à 4 h 13. Au cours des 3 minutes suivantes, le Halit Bey a quitté le chenal de navigation et s'est échoué sur l'avant.
À 4 h 16, le pilote qui avait la conduite du navire a signalé l'échouement aux SCTM, et les 2 pilotes ont demandé au régulateur des SCTM d'autoriser une tentative de renflouement du Halit Bey. Cette autorisation leur a été accordée après que les SCTM ont consulté Transports Canada Sécurité et sûreté maritimes (TCSSM) et la Direction des interventions environnementales de la Garde côtière canadienne, mais les pilotes n'ont finalement pas procédé par peur d'endommager le navire. Les 2 pilotes ont été remplacés par 2 autres pilotes à 9 h, mais l'apprenti pilote est demeuré à bord.
Le Halit Bey est demeuré échoué durant 10 heures. À 13 h 30, on a tenté de le renflouer une première fois avec 2 remorqueurs, mais sans succès. Cette tentative s'est effectuée sous la direction des 2 nouveaux pilotes et en présence d'un inspecteur de TCSSM. À la seconde tentative, à 14 h 10, le navire a été renfloué en utilisant sa propulsion et les 2 mêmes remorqueurs. Escorté par les remorqueurs, le Halit Bey a poursuivi sa route, en utilisant sa propre propulsion et en mode de gouverne asservi, jusqu'au quai qui lui était assigné à Trois-Rivières, où il est arrivé à 18 h 36. Après les activités de déchargement prévues, le navire a quitté Trois-Rivières à 1 h 15 le 24 avril, à destination de Valleyfield. Le 25 avril, des plongeurs ont effectué une inspection sous-marine à Valleyfield et ont conclu que le navire n'avait subi aucune avarie.
Conditions environnementales
Le matin du 22 avril, le ciel était couvert avec des périodes de pluie. La visibilité était assez bonne. Le vent soufflait de l'est à une vitesse de 4 à 5 nœuds, et la température de l'air était de 5 °C. À Grondines, la marée haute était prévue à 2 h 45, et le courant était négligeable. Le lever du soleil était à 4 h 51.
Certificats du navire
Le Halit Bey avait tous les certificats appropriés pour sa classe de navire et le voyage prévu. Le navire détenait un certificat de gestion de la sécurité (SMC) émis par l'American Bureau of Shipping (ABS), valide du 4 mai 2013 au 3 mai 2018. Le navire avait aussi un certificat de sécurité de construction pour navire de charge émis par l'ABS le 6 janvier 2013 et valide jusqu'au 20 mai 2014.
Brevets du personnel
Tous les membres d'équipage du Halit Bey possédaient les brevets requis pour les postes qu'ils occupaient à bord. Le capitaine était titulaire d'un brevet de capitaine et, depuis 2009, avait été capitaine à bord de divers navires appartenant à la société propriétaire du Halit Bey. Il s'était joint à l'équipage du Halit Bey le 27 décembre 2013. Il s'agissait de son premier mandat à bord du navire.
Le chef mécanicien était titulaire d'un brevet de chef mécanicien depuis 1996. Il naviguait depuis 2004 à titre de chef mécanicien à bord de divers navires appartenant à la société propriétaire du Halit Bey. Il s'était joint à l'équipage du Halit Bey le 6 avril 2014. Il s'agissait de son premier mandat à bord du navire.
L'officier de quart détenait un brevet d'officier de quart émis en 2006, et naviguait depuis, à ce poste, à bord de différents navires. Il s'était joint à l'équipage du Halit Bey le 6 avril 2014.
Le timonier naviguait depuis 2008 et avait obtenu un brevet de navigant qualifié en 2009. Il s'était joint à la société propriétaire du navire et à l'équipage du Halit Bey le 27 décembre 2013. Il s'agissait de son premier mandat à bord du navire.
Le pilote qui avait la conduite du navire au moment de l'événement détenait un brevet de capitaine au long cours et avait obtenu un brevet de pilote de classe A en avril 2004. L'autre pilote à bord détenait un brevet de capitaine, à proximité du littoral, et était titulaire d'un brevet de pilote de classe C1 depuis avril 2014. L'apprenti pilote détenait un brevet de capitaine au long cours et avait obtenu une licence d'apprenti de classe D en avril 2013.
Dispositif de commande de l'appareil à gouverner
Sur un navire de charge typique, l'appareil à gouverner est contrôlé par un seul panneau de commande intégré au pupitre principal de la passerelle qui permet aux membres de l'équipe à la passerelle de choisir différents modes de gouverne de l'appareil à gouverner (asservi, non asservi, pilotage automatique) et de le contrôler à partir des pupitres installés sur les ailerons de passerelle bâbord et tribord (si le navire en est pourvu).
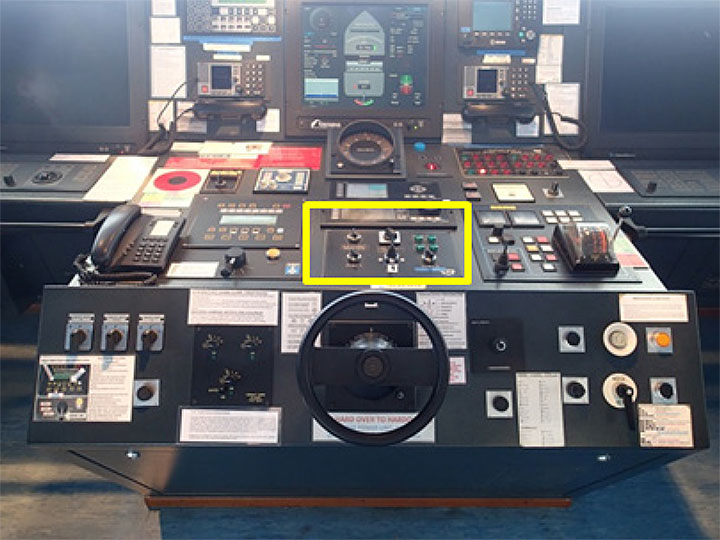
Au moment de la construction du Halit Bey, le constructeur a installé 2 panneaux de commande de l'appareil à gouverner différents sur le pupitre principal de la passerelle : le panneau de commande central et le panneau de commande de droite (photo 2). Ces 2 panneaux de commande provenaient de fabricants différents.
Sur le panneau de commande central, en plus des interrupteurs de démarrage des 2 pompes de l'appareil à gouverner, se trouve un sélecteur qui permet de basculer entre les 5 modes de gouverne de l'appareil à gouverner : (0) OFF [arrêt], (1) NON-FOLLOW UP [non asservi], (2) FOLLOW UP [asservi], (3) AUTOPILOT [pilotage automatique] et (4) WINGS [ailerons] (photo 3).
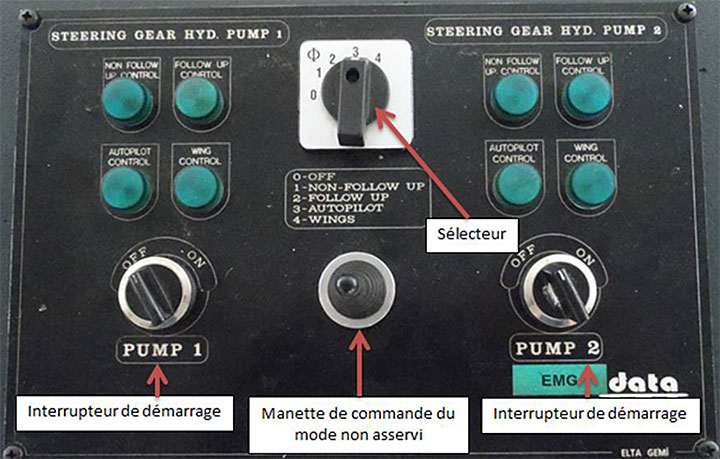
Il y a aussi une courte manette noire qui peut servir à diriger le navire en mode non asservi. L'équipage du Halit Bey n'avait toutefois pas l'habitude d'utiliser cette manette. La manette se trouve au centre du panneau de commande central, n'est pas identifiée, n'est pas dotée d'un couvercle de protection ni d'aucun dispositif de verrouillage pour empêcher qu'elle soit actionnée accidentellement.
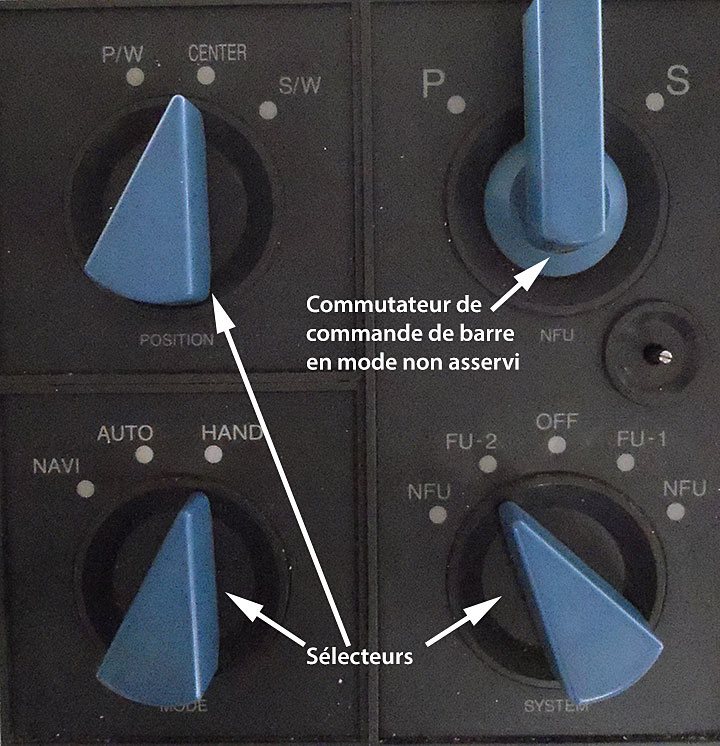
Comme le montre la photo 4, le panneau de commande de droite comprend 3 sélecteurs et 1 commutateur de commande de barre en mode non asservi. Le sélecteur supérieur gauche (POSITION) permet à l'opérateur de transférer les commandes de manœuvre vers les pupitres principal (CENTER) et les ailerons de passerelle bâbord (P/W) et tribord (S/W). Le sélecteur inférieur gauche (MODE) permet à l'opérateur de commander l'appareil à gouverner manuellement (HAND) ou par le SEVCM (NAVI)Note de bas de page 6 ou le pilote automatique (AUTO)Note de bas de page 7. Le sélecteur inférieur droit (SYSTEM) permet à l'opérateur de basculer entre les modes asservi (FU) et non asservi (NFU) et de sélectionner le tableau de démarrage des pompes de l'appareil à gouvernerNote de bas de page 8 qui alimentera le dispositif de commande de l'appareil à gouverner. Dès que le mode non asservi est sélectionné sur 1 des 2 sources d'alimentation, on peut utiliser le commutateur de commande de barre en mode non asservi dans le coin supérieur droit pour déplacer le gouvernail à bâbord (P) ou à tribord (S). Sur ce panneau, les identifiants sont rétroéclairés et leur luminosité est réglable par l'entremise du gradateur installé du côté droit du panneau.
Modes de gouverne
Mode asservi
Le mode asservi est le mode le plus utilisé pour manœuvrer un navire dans des eaux restreintes. Dans ce mode, la roue de gouvernail peut être placée à bâbord ou à tribord pour déplacer le gouvernail entre 0° et 35°. Le dispositif effectue automatiquement les corrections requises afin que l'angle du gouvernail corresponde en tout temps à l'angle demandé.
À bord du Halit Bey, le pupitre principal de la passerelle est équipé d'une roue de gouvernail servant à diriger le navire lorsque celui-ci est en mode asservi.
Mode non asservi
Le mode non asservi est un mode de gouverne de secours que l'équipage peut utiliser en cas de panne du mode asservi. En mode non asservi, on peut déplacer un commutateur de commande de barre vers la gauche ou vers la droite pour déplacer le gouvernail à bâbord ou à tribord. Dans ce mode, le timonier doit tenir le commutateur de commande de barre jusqu'à ce que le gouvernail atteigne l'angle requis puis le relâcher pour arrêter le mouvement du gouvernail. Si des forces extérieures ou d'autres conditions font dévier le gouvernail de l'angle souhaité, le timonier doit repositionner manuellement le gouvernail au moyen du commutateur de commande de barre.
À bord du Halit Bey, il y a 7 commandes de gouverne en mode non asservi : une courte manette noire sur le panneau de commande central (photo 3), un commutateur bleu sur le panneau de commande de droite (photo 4) et un commutateur bleu identique, installé à l'extrémité droite du pupitre principal de la passerelle, entre l'écran du répétiteur de l'enregistreur des données du voyage et le téléphone interne du navire. Chacun des pupitres installés sur les ailerons de passerelle est aussi doté d'une manette et d'un commutateur. Aucune des commandes de l'appareil à gouverner en mode non asservi n'est pourvue de dispositifs de protection.
Mode de pilotage automatique
Le mode de pilotage automatique est habituellement utilisé lorsqu'un navire navigue dans des eaux libres. Dans ce mode, le timonier programme le cap souhaité dans le pilote automatique et ce dernier transmet automatiquement les signaux électriques appropriés pour déplacer le gouvernail à bâbord ou à tribord afin que le navire maintienne le cap. Certains pilotes automatiques sont pourvus d'une fonction de surpassement qui désactive instantanément le pilotage automatique et passe par défaut en mode non asservi : cette fonction permet à l'opérateur de reprendre rapidement les commandes de l'appareil à gouverner s'il y a lieu.
Le Halit Bey est équipé d'un pilote automatique adaptatifNote de bas de page 9 qui est intégré au dispositif de commande de l'appareil à gouverner du navire. Le pilote automatique et le dispositif de commande de l'appareil à gouverner proviennent de fabricants différents. Le pilote automatique du Halit Bey comporte une fonction de surpassement qui entre en jeu lorsqu'on déplace la manette noire de commande du mode non asservi sur le panneau de commande central.
Commande sur les ailerons de passerelle
À bord de la plupart des navires de charge modernes, les membres d'équipage peuvent transférer la commande de l'appareil à gouverner, et d'autres systèmes, aux pupitres installés sur les ailerons de passerelle bâbord ou tribord. L'opérateur peut alors gouverner en mode non asservi au moyen d'un seul commutateur de commande de barre sur chacun des pupitres installés sur les ailerons de passerelle.
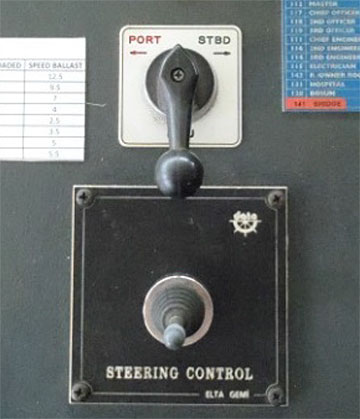
Sur le Halit Bey, les pupitres installés sur les ailerons de passerelle bâbord et tribord étaient tous 2 dotés de 2 commandes de barre en mode non asservi (photo 5). Le commutateur de commande de barre supérieur (NFU) pouvait être actionné à partir du panneau de commande de droite, tandis que la manette de gouverne inférieure (STEERING CONTROL) pouvait être actionnée à partir du panneau de commande central. Il n'y avait aucune indication qui permettait de savoir à quel panneau de commande chaque commande de barre était raccordée.
Panneau d'alarme de l'appareil à gouverner
Sur le Halit Bey, un panneau d'alarme de l'appareil à gouverner est installé sur le pupitre principal de la passerelle, devant et à gauche de la roue de gouvernail. Ce panneau comprend 3 témoins lumineux verts qui indiquent l'état opérationnel des 2 pompes de l'appareil à gouverner et du pilote automatique. Le panneau compte aussi 16 témoins lumineux rouges pour différentes alarmes du dispositif de commande de l'appareil à gouverner, notamment en cas de panne du pilote automatique, du déclenchement de la fonction de surpassement du pilote automatique et de la défaillance de la fonction de surpassement du pilote automatique. Ce panneau comporte aussi des boutons-poussoirs qui permettent de réarmer la fonction de surpassement du pilote automatique, de vérifier le fonctionnement des témoins lumineux et d'éteindre l'alarme sonore. La luminosité des témoins lumineux de ce panneau est réglable. Aucune des marques d'identification des éléments du panneau d'alarme n'est rétroéclairée.
Examen après l'événement et mise à l'essai du dispositif de commande de l'appareil à gouverner
À la suite de l'échouement du Halit Bey, des enquêteurs du Bureau de la sécurité des transports du Canada (BST) sont montés bord pour procéder à la mise à l'essai du dispositif de commande de l'appareil à gouverner. Au cours des essais du panneau de commande central visant à établir le mode de fonctionnement de chacune des commandes de l'appareil à gouverner (annexe B), les enquêteurs du BST ont fait les observations suivantes :
- Lorsque le sélecteur du panneau de commande central est réglé au mode asservi (position 2), toutes les commandes de l'appareil à gouverner sont désactivées.
- Lorsque le sélecteur du panneau de commande central est réglé au mode pilotage automatique (position 3), le pilote automatique ne se met pas en marche. Ce réglage transfère plutôt la sélection du mode de gouverne au panneau de commande de droite. La pratique à bord du Halit Bey était de toujours laisser le sélecteur du panneau de commande central au pilotage automatique (position 3), et les officiers de pont utilisaient seulement le panneau de commande de droite pour sélectionner le mode de gouverne.
- Même si la position 3 sur le panneau de commande central ne met pas le pilote automatique en marche, la fonction de surpassement du pilote automatique connexe peut quand même être déclenchée par le déplacement de la manette noire du mode non asservi qui se trouve sur le panneau de commande central. Un effleurement de la manette suffit à déclencher la fonction de surpassement du pilote automatique. Le surpassement du pilote automatique peut être déclenché non seulement lorsque le navire est en mode de pilotage automatique, mais aussi dans les modes asservi et non asservi.
- Lorsque la fonction de surpassement du pilote automatique est déclenchée, toutes les commandes de l'appareil à gouverner sur la passerelle sont désactivées, à l'exception de la manette de commande noire du mode non asservi sur le panneau de commande central. L'appareil à gouverner passe par défaut en mode non asservi.
- Afin de réactiver les autres commandes de l'appareil à gouverner après le déclenchement de la fonction de surpassement du pilote automatique, un membre d'équipage doit appuyer sur le bouton de réarmement de la fonction de surpassement qui se trouve sur le panneau d'alarme de l'appareil à gouverner, ce qui rétablit le dispositif de commande de l'appareil à gouverner.
Les essais effectués sur l'appareil à gouverner ont permis de constater que le navire respectait les exigences de la Convention internationale pour la sauvegarde de la vie humaine en mer (SOLAS) à l'égard du fonctionnement de l'appareil à gouverner principalNote de bas de page 10. Il fallait, en moyenne, 25 secondes pour déplacer le gouvernail d'un angle de 35° d'un côté à un angle de 30º de l'autre côté avec 1 pompe de l'appareil à gouverner, et 14 secondes lorsque les 2 pompes étaient en marche. Au cours des essais, l'appareil à gouverner a atteint un angle maximal de 35° tant à bâbord qu'à tribord.
Comparaison des dispositifs de commande des appareils à gouverner
Après l'événement à l'étude, des enquêteurs du BST se sont rendus à bord d'un pétrolier-chimiquier similaire au Halit Bey afin de comparer les dispositifs de commande de l'appareil à gouverner. Le navire utilisé pour la comparaison, le Manas (OMI 9447055), est muni d'un appareil à gouverner et d'un système d'alarme provenant du même fabricant que ceux installés à bord du Halit Bey. La disposition générale de la passerelle et l'équipement du Manas sont semblables à ceux du Halit Bey, mais le Manas a un seul panneau de commande de l'appareil à gouverner installé devant la roue de gouvernail (photo 6), et chacun des pupitres installés sur les ailerons bâbord et tribord n'a qu'une seule manette de commande du mode non asservi.
Les enquêteurs ont effectué des essais sur les commandes de l'appareil à gouverner du Manas, au cours desquels ils ont vérifié le fonctionnement de toutes les commandes de l'appareil à gouverner dans chacun des modes de gouverne. Ils ont obtenu les résultats suivants :
0 - Off [arrêt] : tous les modes de gouverne sont désactivés.
1 - NFU [non asservi] : gouverne du navire au moyen de la manette noire qui se trouve sur le panneau de commande de l'appareil à gouverner.
2 - Follow-up [asservi] : gouverne du navire au moyen de la roue de gouvernail.
3 - Autopilot [pilotage automatique] : gouverne du navire par le pilote automatique. Le déplacement de la manette qui se trouve sur le panneau de commande de l'appareil à gouverner déclenche l'alarme de surpassement du pilote automatique et désactive le pilotage automatique. Le dispositif de commande de l'appareil à gouverner passe alors automatiquement en mode non asservi et le navire peut être dirigé au moyen de la manette.
4 - Wings [ailerons] : gouverne du navire en mode non asservi au moyen des manettes des pupitres installés sur les ailerons bâbord et tribord.
Navires jumeaux
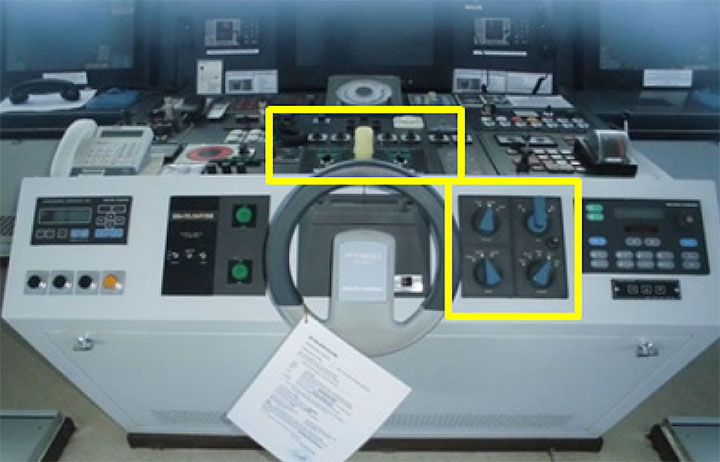
Le Halit Bey a 2 navires jumeaux : le Nilufer Sultan (OMI 9410131), construit en 2008, et le Mehmet A (OMI 9418822), construit en 2011. Les 2 navires sont munis d'un dispositif de commande de l'appareil à gouverner similaire à celui du Halit Bey, avec 2 panneaux de commande de l'appareil à gouverner distincts, soit un devant la roue de gouvernail et l'autre à droite de la roue (photo 7 et photo 8).

Inspection après l'événement par le technicien autorisé du fabricant
Au cours de la soirée du 22 avril, après l'événement, un technicien est monté à bord du Halit Bey à la demande des propriétaires du navire. Le technicien a inspecté le dispositif de commande de l'appareil à gouverner et mis à l'essai tous les modes de gouverne. Le rapport du technicien indique que l'appareil à gouverner a été mis à l'essai alors que le navire était à quai et qu'il fonctionnait normalement. Le rapport indique également que le technicien n'a pas pu reproduire les conditions de la panne de l'appareil à gouverner; il souligne également que lorsque la manette centrale de surpassement est utilisée, toutes les autres commandes sont inopérantes et que l'opérateur doit appuyer sur le bouton de réarmement de la fonction de surpassement pour reprendre la commande de l'appareil à gouverner. Au cours des essais, alors que le sélecteur du panneau de commande central était réglé à la position 2 (follow-up/asservi), le technicien a noté que les manettes du panneau de commande central, du pupitre de l'aileron bâbord et du pupitre de l'aileron tribord n'étaient pas « actives » et que la roue de gouvernail ne fonctionnait pas.
Documentation sur la commande de l'appareil à gouverner
Les exploitants des navires régis par le Code international de gestion pour la sécurité de l'exploitation des navires et la prévention de la pollution (Code ISM), doivent établir des procédures sur la préparation de plans et d'instructions pour les opérations clés à bord d'un navireNote de bas de page 11, y compris sur l'utilisation de l'appareil à gouverner.
Le Halit Bey avait à bord un manuel couvrant les caractéristiques techniques des éléments de l'appareil à gouverner, des schémas techniques et électriques ainsi que les certificats d'homologation de type pour le pilote automatique et le poste de barre. Des affiches apposées sur la passerelle expliquaient la méthode à suivre pour basculer d'un mode de gouverne à un autre au moyen du panneau de commande de droite, mais il n'y avait pas de renseignements au sujet du panneau de commande central et de ses fonctions, ni sur son utilisation conjointe avec le panneau de commande de droite. Il n'y avait aucune indication à propos de la manette de commande du mode non asservi ou de la fonction de surpassement du pilote automatique. Il n'y avait aucun manuel des opérations sur le dispositif de commande de l'appareil à gouverner à bord.
Connaissance de l'équipement de la passerelle
Le Code ISM indique que les exploitants doivent établir des procédures pour garantir que le nouveau personnel et le personnel affecté à de nouvelles fonctions liées à la sécurité et à la protection de l'environnement reçoivent la formation nécessaire à l'exécution de leurs tâchesNote de bas de page 12.
La société de gestion du Halit Bey avait préparé des listes de vérification sur les différentes facettes de l'entretien, de la vérification et de la formation de l'équipage en matière de sécurité. Une des listes de vérification, intitulée « Bridge Check List 1 - Familiarization with Bridge Equipment » [Liste de vérification 1 – Familiarisation avec l'équipement de la passerelle], dresse la liste de l'équipement et des commandes de navigation que les membres de l'équipe à la passerelle doivent étudier et comprendre lorsqu'ils se joignent au navire. Cette liste traite notamment des différentes méthodes de commande de l'appareil à gouverner que les membres d'équipage doivent connaître : mode manuel, pilotage automatique, transferts d'urgence et mises à l'essai des dispositifs. Lorsque le membre d'équipage a coché tous les éléments de la liste pour indiquer qu'il a terminé sa familiarisation, le membre d'équipage, l'officier responsable de la familiarisation, le chef du département et le capitaine signent le formulaire.
Les listes de vérification à l'égard de l'officier de quart et du timonier avaient été dûment remplies et signées.
Appareil à gouverner : essais et exercices
La Convention SOLAS décrit les essais et les exercices associés à l'appareil à gouverner du navire qui doivent être effectués à intervalle régulierNote de bas de page 13. Ces essais et exercices étaient également consignés dans le registre des exercices sur l'appareil à gouverner qui fait partie des documents contenus dans le système de gestion de la sécurité du Halit Bey.
À bord du Halit Bey, les exercices d'urgence sur l'appareil à gouverner ne suivaient qu'un seul scénario : l'équipage simulait une panne générale des commandes de l'appareil à gouverner de la passerelle et le personnel de la salle des machines opérait l'appareil à gouverner sur place tout en maintenant une communication bidirectionnelle avec l'équipe à la passerelle. Le plus récent exercice avait eu lieu le 14 avril 2014, soit 8 jours avant l'événement à l'étude.
Le registre d'essai du dispositif de gouverne d'urgence du navire indique que tous les essais et vérifications doivent être effectués par le personnel de la salle des machines. Le registre d'essai était rempli chaque semaine et signé par le premier mécanicien, l'électricien, le premier officier et le chef mécanicien. Tous les essais et toutes les vérifications étaient réalisés à partir du compartiment de l'appareil à gouverner. Les derniers essais et vérifications périodiques avaient aussi eu lieu le 14 avril, soit 8 jours avant l'événement.
Surveillance réglementaire
Contrôle des navires par l'État du port
Le Contrôle des navires par l'État du port (CNEP) est un programme d'inspection des navires, selon lequel les navires étrangers entrant dans les eaux d'un État souverain sont examinés et inspectés en vue d'assurer leur conformité avec les principales conventions maritimes internationalesNote de bas de page 14. Au Canada, les inspecteurs de TCSSM effectuent les inspections du CNEP.
Le Halit Bey a été soumis à une inspection du CNEP le lendemain de son arrivée à Trois-Rivières. Le rapport rédigé par les 3 inspecteurs du contrôle indique que le compartiment de l'appareil à gouverner a été inspecté et que le dispositif de gouverne d'urgence qui s'y trouve a été mis à l'essai. Au cours de l'inspection, les différents modes de commande de l'appareil à gouverner sur la passerelle ont aussi été mis à l'essai. Les inspecteurs du CNEP ont observé que le dispositif de commande de l'appareil à gouverner du navire comportait 2 panneaux de commande distincts ainsi que certaines incompatibilités fonctionnelles entre les différents modes de gouverne.
Le rapport de l'inspection du CNEP a relevé une lacune, soit que l'équipage du navire qui s'est échoué le 22 avril 2014 ne connaissait pas les procédures de gouverne sur la passerelle (non-conformité au Code ISM). On a donné au capitaine un délai de 3 mois pour corriger cette non-conformité et pour organiser un audit interne de sécurité du navire.
Inspection de la société de classification
Selon l'International Association of Classification Societies (IACS), la classification des navires vise à vérifier la solidité et l'intégrité structurales des parties essentielles de la coque et des appendices du navire, ainsi que la fiabilité et le fonctionnement de ses différents systèmes essentiels, comme les systèmes de propulsion et de gouverneNote de bas de page 15.
Dans le cas du Halit Bey, la société de classification ABS est l'organisation agréée responsable de l'émission de tous les certificats réglementaires au nom de l'État du pavillon, y compris le certificat de sécurité de construction pour navire de charge.
Dans la soirée qui a suivi l'événement, et le jour suivant, un expert maritime de l'ABS est monté à bord du Halit Bey pour évaluer la structure interne du navire et en a profité pour effectuer des essais du dispositif de commande de l'appareil à gouverner. L'expert maritime a aussi lu le rapport d'entretien du dispositif de commande préparé par le technicien autorisé qui mentionnait que le déplacement de la manette centrale pouvait désactiver les commandes du panneau de commande de droite. Le rapport de l'expert maritime ne présente aucune conclusion sur la perte de commande de l'appareil à gouverner ni sur la cause de l'échouement puisque ces sujets ne faisaient pas partie de son mandat.
Aménagement de la passerelle et disposition de l'équipement
L'ABS publie des notes d'orientation sur l'aménagement ergonomique des passerelles de navigation qui ont pour objectif de fournir aux concepteurs de navires des principes et des données sur la conception des passerelles de navigation. Dans ses notes d'orientation, l'ABS précise que, dans la mesure du possible, l'équipement doit être protégé contre les erreurs humaines, et que l'emplacement et la disposition des commandes doivent être conçus de façon à prévenir l'utilisation accidentelle des commandes susceptibles de modifier l'état du systèmeNote de bas de page 16. Les notes d'orientation suggèrent que, pour ce faire, il est possible d'avoir recours à des dispositifs de protection ou à une disposition appropriée de l'équipementNote de bas de page 17.
Les notes d'orientation portent en outre sur la lisibilité des instruments, en précisant que leur conception doit permettre une lecture facile et exacte le jour et la nuit, et que les alarmes doivent être présentées de façon claire, distinctive, non ambigüe et uniformeNote de bas de page 18.
Fiche de pilotage
La fiche de pilotage sert à fournir des renseignements au pilote lorsqu'il monte à bord du navire. La fiche est remplie par le capitaine et comprend des renseignements sur l'état actuel du navire, notamment sur son chargement, ses systèmes de propulsion et de manœuvre, et d'autres appareils pertinents.
À bord du Halit Bey, la fiche de pilotage comportait certains renseignements inexacts : elle disait que le gouvernail était de type « CPP »Note de bas de page 19, que la vitesse minimale du navire était de 13 nœuds, que le sens de rotation de l'hélice était contraire à celui représenté sur le schéma, et que le régime critique de la machine principale était de 500 tours par minute, soit égal au régime nominal. De plus, la ligne destinée à indiquer si le navire était pourvu d'un bulbe d'étrave avait été laissée en blanc (annexe C).
Enregistreur des données du voyage
L'enregistreur des données du voyage (VDR) enregistre et sauvegarde des renseignements et des paramètres essentiels afférents aux dernières heures d'un voyage afin de permettre aux autorités pertinentes d'établir plus facilement les causes et les facteurs contributifs d'un événement.
Le VDR du Halit Bey était conçu pour enregistrer les paramètres suivants : données du SIA des navires à proximité, images radar, les conversations sur la passerelleNote de bas de page 20, conversations sur radiotéléphone VHF, cap du gyrocompas, taux de giration, angle du gouvernail, position géographique (latitude et longitude), route et vitesse sur le fond, vitesse relative et direction du vent, profondeur de l'eau, pas de l'hélice, et régime de la machine. L'enregistreur avait un certificat d'homologation de type et avait subi un essai de fonctionnement annuel obligatoire le 28 mars 2014. Le rapport d'entretien indiquait que toutes les fonctions avaient été vérifiées et respectaient les critères.
À la suite de l'événement à l'étude, des enquêteurs du BST ont extrait toutes les données enregistrées par le VDR du Halit Bey et ont découvert que le VDR avait seulement enregistré les images radar et les conversations sur la passerelle. Il n'a pas été possible d'établir pourquoi le VDR n'avait pas enregistré les autres paramètres.
Analyse
Événements ayant mené à l'échouement
Le Halit Bey naviguait en mode asservi dans des eaux restreintes lorsqu'il a subi une perte de la commande de l'appareil à gouverner, probablement causée par le déplacement accidentel de la manette de commande du mode non asservi qui se trouve sur le panneau de commande central de l'appareil à gouverner et qui n'était pas protégée. En raison de la conception du dispositif de commande de l'appareil à gouverner du Halit Bey, le déplacement de la manette de commande du mode non asservi a déclenché l'alarme de surpassement du pilote automatique, même si le navire n'était pas en mode de pilotage automatique. Toutes les commandes de l'appareil à gouverner sur la passerelle ont ainsi été désactivées, à l'exception de la manette de commande du mode non asservi. Sans commande de l'appareil à gouverner, le navire a viré vers la rive.
N'ayant jamais connu une telle situation et ne sachant pas pourquoi l'alarme de surpassement du pilote automatique s'était déclenchée, les membres de l'équipe à la passerelle ne savaient pas comment reprendre la commande de l'appareil à gouverner (ils auraient pu utiliser la manette de commande du mode non asservi pour gouverner le navire ou appuyer sur le bouton de réarmement de la fonction de surpassement sur le panneau d'alarme de l'appareil à gouverner). Dans la courte période précédant l'échouement, l'équipage a tenté un déploiement d'urgence des ancres, mais le navire a quitté le chenal de navigation et s'est échoué.
Aménagement de la passerelle et disposition de l'équipement
Il est essentiel que les systèmes critiques de la passerelle, comme le dispositif de commande de l'appareil à gouverner, soient « intuitifs » et faciles à utiliser par les membres d'équipage. Un système bien conçu doit aussi tenir compte de concepts, comme une tolérance à l'erreur, afin de minimiser les erreurs possibles (par des fonctions de verrouillage ou des dispositifs de protectionNote de bas de page 21 par exemple) ou limiter les conséquences d'une activation accidentelle des dispositifs pour faire en sorte que le navire demeure sécuritaire.
À bord du Halit Bey, le dispositif de commande de l'appareil à gouverner comprenait 2 panneaux de commande distincts provenant de fabricants différents qui présentaient certaines incompatibilités à l'égard de la fonction de surpassement du pilote automatique. Le panneau de commande central étant essentiellement redondant, l'équipage le laissait donc à la position 3 (pilotage automatique) ce qui transférait la commande de l'appareil à gouverner au panneau de commande de droite. Toutefois, à l'insu de l'équipage, la fonction de surpassement du pilote automatique et son alarme pouvaient être déclenchées par la manette de commande du mode non asservi du panneau de commande central, même si le navire n'était pas en mode de pilotage automatique. Le déclenchement de la fonction de surpassement du pilote automatique entraînait la désactivation de toutes les commandes de l'appareil à gouverner sur la passerelle, à l'exception de ladite manette de commande du mode non asservi.
En outre, les commandes de l'appareil à gouverner ne comportaient aucun dispositif de protection ou de verrouillage; de plus, une fois l'alarme de surpassement du pilote automatique déclenchée, l'opérateur ne disposait d'aucun renseignement pour lui indiquer quelles commandes fonctionnaient toujours ou quelle méthode suivre afin de reprendre la commande de l'appareil à gouverner. Le panneau de commande central redondant portait toujours ses identifiants d'origine, ce qui présentait un risque de confusion chez les opérateurs qui ne connaissaient pas les particularités du système. Enfin, le dispositif de commande de l'appareil à gouverner comprenait 2 pupitres installés sur les ailerons et chacun était pourvu de 2 commandes de barre en mode non asservi dont chacune était raccordée à un panneau de commande distinct, ce qui compliquait inutilement les commandes à partir des ailerons de passerelle et présentait des risques de confusion chez l'opérateur, puisqu'il n'y avait aucune indication qui permettait de savoir à quel panneau de commande chaque commande de barre était raccordée.
Dans l'événement à l'étude, l'alarme de surpassement du pilote automatique s'est déclenchée alors que le navire naviguait en mode asservi, donnant un message contradictoire aux membres d'équipage et retardant la prise de mesures puisque ces derniers ne savaient pas comment reprendre la commande de l'appareil à gouverner dans cette situation inhabituelle. Si l'équipement essentiel de la passerelle, comme les commandes de l'appareil à gouverner, n'est pas conçu et disposé pour être intuitif et facile à utiliser, et n'est pas pourvu de dispositifs de protection contre les erreurs humaines, l'opérateur risque de ne pas être en mesure de réagir rapidement et efficacement en situation d'urgence.
Connaissance de l'équipement essentiel à la sécurité
Afin de bien utiliser l'équipement à bord, l'équipage doit savoir comment il fonctionne en conditions normales et en situations d'urgence. L'équipage doit aussi connaître la méthode à suivre pour reprendre les commandes, si nécessaire. Cette connaissance peut être acquise dans des manuels techniques et grâce à la familiarisation, à des exercices et à des procédures affichées.
Dans l'événement à l'étude, compte tenu des caractéristiques du dispositif de commande de l'appareil à gouverner du navire, il était particulièrement important que les membres d'équipage connaissent bien tous les modes et toutes les commandes de gouverne, ainsi que les mesures à prendre en présence d'une alarme de surpassement du pilote automatique. Toutefois, lors des séances de familiarisation à bord du Halit Bey, les membres d'équipage n'étaient pas tenus d'apprendre les mesures à prendre pour reprendre la commande de l'appareil à gouverner à la suite d'une alarme de surpassement du pilote automatique, et les 2 méthodes possibles ne figuraient pas sur la liste de vérification sur la familiarisation qui se trouvait à bord. Aucun renseignement sur la reprise de la commande de l'appareil à gouverner n'était affiché près du poste de barre, et il n'y avait aucun manuel des opérations visant le dispositif de commande de l'appareil à gouverner à bord.
Bien que conformes à la Convention internationale pour la sauvegarde de la vie humaine en mer (SOLAS), les exercices d'urgence sur l'appareil à gouverner à bord du navire ne suivaient qu'un seul scénario qui ne comprenait pas la mise à l'essai des commandes de l'appareil à gouverner, ni l'utilisation du mode non asservi, ni le basculement entre les différents modes de gouverne, ni la reprise de la barre après le déclenchement de la fonction de surpassement du pilote automatique. Les membres de l'équipe à la passerelle n'avaient donc que peu d'occasions de se familiariser avec les commandes de gouverne de secours et les caractéristiques du dispositif de commande de l'appareil à gouverner du Halit Bey. Les officiers de pont (dont aucun ne possédait plus de 4 mois d'expérience à bord du navire) ne connaissaient donc pas toutes les caractéristiques du dispositif de commande de l'appareil à gouverner et n'avaient jamais eu à réagir au déclenchement de la fonction de surpassement du pilote automatique alors que le navire n'était pas en mode de pilotage automatique. Ainsi, aucun d'eux n'était apte à prendre les mesures voulues pour réagir à la situation et reprendre la commande de l'appareil à gouverner.
Si les membres d'équipage ne connaissent pas toutes les particularités de l'équipement essentiel à la sécurité, notamment le dispositif de commande de l'appareil à gouverner, il y a un risque qu'ils ne sachent pas comment utiliser le matériel de façon optimale ou qu'ils ne soient pas en mesure de reprendre les commandes en cas de problème.
Enregistreur des données du voyage
Un enregistreur des données du voyage (VDR) a pour objet de créer et de tenir à jour un registre sécurisé et récupérable des renseignements indiquant la position, le mouvement, le statut physique et la conduite d'un navire pendant les dernières heures d'opération. Des données objectives sont inestimables pour les enquêteurs qui cherchent à comprendre le déroulement des événements et à cerner les problèmes opérationnels et les facteurs humains.
Dans l'événement à l'étude, le VDR du Halit Bey a enregistré seulement les images radar et les conversations sur la passerelle, limitant les données disponibles pour l'enquête.
Si des enregistrements de données et de conversations sur la passerelle ne sont pas disponibles dans le cadre d'une enquête, cela peut nuire à la détermination et à la communication des lacunes de sécurité qui permettraient d'améliorer la sécurité des transports.
Faits établis
Faits établis quant aux causes et aux facteurs contributifs
- La perte de la commande de l'appareil à gouverner au moyen de la roue de gouvernail a probablement été causée par le déplacement accidentel de la manette de commande du mode non asservi qui n'était pas protégée, ce qui a déclenché la fonction et l'alarme de surpassement du pilote automatique.
- Une incompatibilité entre les panneaux de commande de l'appareil à gouverner a fait en sorte que, même si le navire n'était pas en mode de pilotage automatique, le déplacement de la manette de commande du mode non asservi a déclenché la fonction de surpassement du pilote automatique et de son alarme, désactivant toutes les autres commandes de l'appareil à gouverner, à l'exception de ladite manette de commande du mode non asservi.
- Les membres de l'équipe à la passerelle ne connaissaient pas assez bien les caractéristiques du dispositif de commande de l'appareil à gouverner du Halit Bey et ne savaient pas comment reprendre la commande de l'appareil à gouverner après le déclenchement de l'alarme de surpassement du pilote automatique.
- Après la perte de la commande de l'appareil à gouverner, le navire a viré sur bâbord, vers la rive.
- Dans la courte période précédant l'événement, l'équipage a tenté en vain de réduire la vitesse et de déployer les ancres pour empêcher le navire de quitter le chenal de navigation et de s'échouer.
Faits établis quant aux risques
- Si l'équipement essentiel de la passerelle, comme les commandes de l'appareil à gouverner, n'est pas conçu et disposé pour être intuitif et facile à utiliser, et n'est pas pourvu de dispositifs de protection contre les erreurs humaines, l'opérateur risque de ne pas être en mesure de réagir rapidement et efficacement en situation d'urgence.
- Si les membres d'équipage ne connaissent pas toutes les particularités de l'équipement essentiel à la sécurité, notamment le dispositif de commande de l'appareil à gouverner, il y a un risque qu'ils ne sachent pas comment utiliser le matériel de façon optimale ou qu'ils ne soient pas en mesure de reprendre les commandes en cas de problème.
- Si des enregistrements de données et de conversations sur la passerelle ne sont pas disponibles dans le cadre d'une enquête, cela peut nuire à la détermination et à la communication des lacunes de sécurité qui permettraient d'améliorer la sécurité des transports.
Autres faits établis
- La fiche de pilotage comportait certains renseignements inexacts ou incomplets.
- Les marques d'identification des éléments du panneau d'alarme de l'appareil à gouverner sur la passerelle n'étaient pas rétroéclairés et étaient difficiles à lire le soir; l'équipe à la passerelle a dû utiliser un appareil d'éclairage indépendant pour lire les marques d'identification et confirmer l'alarme.
- Deux navires jumeaux, construits par le même chantier naval, sont munis d'un dispoitif de commande de l'appareil à gouverner similaire à celui du Halit Bey, avec 2 panneaux de commande de l'appareil à gouverner distincts.
- Au cours des essais effectués après l'événement sur le dispositif de commande de l'appareil à gouverner, les inspecteurs du Contrôle des navires par l'État du port et l'expert maritime mandaté par l'organisation agréée du navire ont établi que le dispositif de commande de l'appareil à gouverner du navire comportait 2 panneaux de commande incompatibles, mais n'ont pas exigé que les propriétaires y remédient.
Mesures de sécurité
Mesures de sécurité prises
Bureau de la sécurité des transports du Canada
Le 29 mai 2014, le Bureau de la sécurité des transports du Canada (BST) a envoyé aux propriétaires du navire l'avis de sécurité maritime (ASM) 05/14 qui portait sur les problèmes liés à la configuration des commandes de l'appareil à gouverner et à la familiarisation des membres de l'équipe à la passerelle avec le dispositif de commande de l'appareil à gouverner du Halit Bey. Une copie de l'avis a également été transmise à Transports Canada, aux autorités pertinentes de l'État du pavillon, aux sociétés de classification des 2 navires jumeaux, aux propriétaires du navire jumeau Mehmet A, et à l'International Association of Classification Societies.
VBG Shipping and Trading Company
À la suite de l'échouement, des procédures complètes de transfert d'urgence de la commande de l'appareil à gouverner ont été affichées sur la passerelle du Halit Bey et du Nilufer Sultan. Ces procédures tiennent compte de la particularité du dispositif de commande de l'appareil à gouverner qui pourrait être mis hors service advenant le déclenchement de la fonction de surpassement du pilote automatique. La société propriétaire du navire a également diffusé à l'échelle de sa flotte une lettre circulaire sur la sécurité de la navigation qui comprend une photo du sélecteur qui se trouve sur le panneau de commande central pour faire connaître les leçons tirées de l'événement. Les membres d'équipage qui participent au quart à la passerelle ont reçu une formation sur la configuration particulière des commandes de l'appareil à gouverner du Halit Bey. De plus, les procédures de familiarisation et la liste de vérification à l'intention des nouveaux membres de l'équipe à la passerelle qui se joignent au navire ont été modifiées pour traiter de la manette de commande du mode non asservi et sensibiliser davantage au fonctionnement de ladite manette. En outre, un dispositif de protection a été installé sur la manette qui se trouve sur le panneau de commande central de l'appareil à gouverner à bord des 2 navires.
Le présent rapport conclut l'enquête du Bureau de la sécurité des transports sur cet événement. Le Bureau a autorisé la publication du rapport le . Le rapport a été officiellement publié le .
Annexes
Annexe A – Région où s'est produit l'événement
Annexe B – Résultats des essais effectués après l'événement sur le dispositif de commande de l'appareil à gouverner
| Commandes de l'appareil à gouverner | Modes de gouverne | ||||
|---|---|---|---|---|---|
| 0 - Off [Arrêt] | 1 - NFU [non asservi] | 2 - Follow-up [asservi] | 3 - Autopilot [pilotage automatique] | 4 - Wings [ailerons] | |
| Roue de gouvernail | – | – | – | √ si le panneau de droite est réglé à « centre + hand + FU-1 ou FU-2 » | – |
| Manette de commande du mode non asservi du panneau de commande central (devant la roue de gouvernail) | – | √ | – | √* *le déplacement de la manette désactive toutes les autres commandes de l'appareil à gouverner |
– |
| Commutateur de commande de barre en mode non asservi du panneau de commande de droite (à droite de la roue de gouvernail) | – | – | – | √ si le panneau de droite est réglé à « centre + hand + NFU » | – |
| Commutateur de commande de barre en mode non asservi du pupitre principal (à l'extrémité droite du pupitre) | – | – | – | √ si le panneau de droite est réglé à « centre + hand + NFU » | – |
| Commutateur de commande de barre en mode non asservi sur le pupitre de l'aileron bâbord | – | – | – | √ si le panneau de droite est réglé à « P/W + hand + NFU » | – |
| Manette de gouverne du pupitre de l'aileron bâbord | – | – | – | – | √ |
| Commutateur de commande de barre en mode non asservi sur le pupitre de l'aileron tribord | – | – | – | √ si le panneau de droite est réglé à « S/W + hand + NFU » | – |
| Manette de gouverne du pupitre de l'aileron tribord | – | – | – | – | √ |
Nota : Un crochet (√) indique le fonctionnement d'une commande de l'appareil à gouverner dans un mode particulier et un tiret (–) indique lorsqu'une commande ne fonctionne pas dans un mode particulier.
Annexe C - Fiche de pilotage

Nota : Pour protéger la vie privée des personnes, le Bureau de la sécurité des transports (BST) a masqué les noms qui étaient écrits sur ce document.
Source : Fiche de pilotage du Halit Bey, V.B.G. Denizcilik Sanayi Ticaret A.Ş. [disponible en anglais seulement]