Collision à un passage à niveau
Train de marchandises numéro 205 09
exploité par le Chemin de fer Canadien Pacifique
au point milliaire 128,90, subdivision de Broadview
Broadview (Saskatchewan)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Le 9 août 2012, vers 18 h 35, heure normale du Centre, le train de marchandises numéro 205 09 du Canadien Pacifique se dirige vers l'ouest à une vitesse de 53 mi/h lorsqu'il percute une fourgonnette de camping se dirigeant vers le sud à un passage à niveau public passif pourvu de croix de Saint André, situé au point milliaire 128,90 dans la subdivision de Broadview, près de Broadview (Saskatchewan). En raison de la collision, la fourgonnette de camping est détruite, 4 des 6 occupants du véhicule sont mortellement blessés, le conducteur est gravement blessé et l'autre occupant subit des blessures mineures. La locomotive est légèrement endommagée et aucun des membres de l'équipe de train n'est blessé.
1.0 Renseignements de base
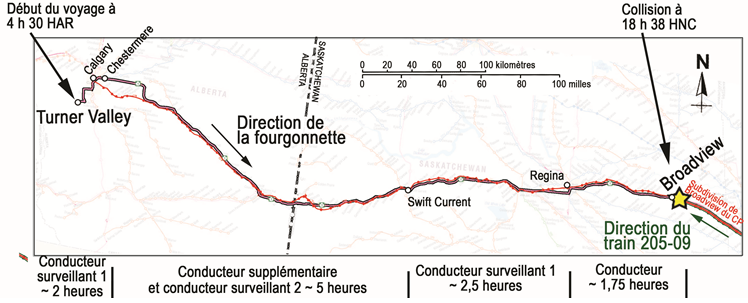
Le 9 août 2012 vers 4 h 30Note de bas de page 1, un véhicule Ford E-350 Econoline 2007 aménagé en fourgonnette de camping (la fourgonnette), construit en novembre 2006 et pourvu de 7 ceintures de sécurité, a quitté Turner Valley (Alberta) en direction est à destination d’une ferme située près de Broadview (Saskatchewan). La fourgonnette mesurait environ 20 pieds et pesait approximativement 3600 kg. Elle faisait l’objet d’opérations d’entretien régulières, elle était en bon état et elle était munie de nouveaux pneus. Un conducteur surveillant (conducteur surveillant 1) titulaire d’un permis doté de tous les privilèges était au volant. Le véhicule transportait 5 autres passagers, soit un conducteur surveillant qualifié supplémentaire (conducteur surveillant 2), un conducteur débutant détenteur d’un permis d’apprenti (le conducteur) et 3 enfants.
Environ 2 heures après le départ, il y a eu un arrêt à Chestermere (Alberta), pour cueillir une valise, après quoi un autre conducteur a pris la relève et la fourgonnette a repris sa route. Le conducteur surveillant 2 et le conducteur ont pris le volant tour à tour de Chestermere à Swift Current (Saskatchewan), pendant que le conducteur surveillant 1 faisait une sieste à l’arrière de la fourgonnette. Le conducteur surveillant 1 a ensuite conduit de Swift Current à Regina (Saskatchewan), pendant que le conducteur dormait. Au départ de Regina, le conducteur a repris le volant sous la supervision du conducteur surveillant 1. La majeure partie du voyage s’est déroulée sur un tronçon de l’autoroute 1 qui longeait les voies du Chemin de fer Canadien Pacifique (CP) (figure 1).
La subdivision d’Indian Head du CP s’étend vers l’est à partir de Regina (point milliaire 93,5) jusqu’à Broadview (point milliaire 0,0) parallèlement à l’autoroute 1. À Broadview, l’autoroute 1 traverse du côté nord de la voie, puis la subdivision de Broadview du CP s’étend vers l’est à partir de Broadview (point milliaire 130,9) jusqu’à Brandon (Manitoba) (point milliaire 0,0). Pendant le trajet de Regina à Broadview, les passagers de la fourgonnette ont surtout observé des mouvements de train vers l’est.
Le train de marchandises du CP numéro 205-09 (le train) se dirigeait vers l’ouest. Il avait quitté Winnipeg (Manitoba) pour se rendre à Vancouver (Colombie-Britannique). Le train était tiré par 3 locomotives placées en tête et comptait 63 wagons (53 wagons chargés et 10 wagons vides). La locomotive de tête était dotée d’une caméra vidéo orientée vers l’avant. Le train mesurait environ 6020 pieds et pesait approximativement 5478 tonnes. Le train avait fait l’objet d’une inspection mécanique complète et d’essais des freins à air avant son départ; aucune anomalie n’avait alors été décelée. L’équipe de train se composait d’un mécanicien de locomotive et d’un chef de train. Les deux membres de l’équipe connaissaient bien la subdivision, satisfaisaient aux exigences en matière de repos et de condition physique et étaient qualifiés pour leurs postes respectifs.
1.1 L’accident
À 18 h 34, le train se dirigeait vers l’ouest à une vitesse de 53 mi/h dans la subdivision de Broadview avec ses phares de fossé et ses phares avant allumés à pleine intensité. Dans ce secteur, la voie se trouve à environ 50 ou 60 mètres au sud de l’autoroute 1. Le sol entre l’autoroute et les voies est recouvert principalement de brome cathartique. La voie est élevée et bordée des deux côtés par des rangées d’arbres et des broussailles denses réparties de façon discontinue. À l’approche du passage à niveau, les membres de l’équipe de train avaient de la difficulté à voir l’autoroute 1, car des arbres situés le long du remblai nord de l’emprise ferroviaire leur cachaient la vue.
L’équipe de train a commencé à serrer les freins rhéostatiques en vue d’un arrêt et d’un changement d’équipe à Broadview. Au poteau commandant de siffler, à environ 1/4 mille du passage à niveau (1320 pieds), l’équipe de train a fait retentir le klaxon de train pendant environ 1 seconde. Le klaxon de train a été actionné de nouveau à environ 1070 pieds du passage à niveau. À environ 575 pieds à l’est du passage à niveau, le train a dépassé des arbres le long de l’emprise et les membres de l’équipe ont pu apercevoir un reflet généré par le pare-brise de la fourgonnette, qui approchait du passage à niveau depuis le nord. L’équipe de train a alors fait retentir le klaxon de train une troisième fois. Lorsque la locomotive s’est trouvée à environ 200 pieds du passage à niveau, l’équipe de train, réalisant que la fourgonnette ne s’arrêtait pas, a donné un long coup de klaxon qui s’est poursuivi pendant que le train passait sur le passage à niveau. Vers 18 h 35, le train a percuté la section médiane de la fourgonnette.
À la suite de l’impact, l’équipe de train a freiné d’urgence et a immobilisé le train; au moment de l’arrêt, la tête du train se trouvait au point milliaire 129,4. L’équipe de train a envoyé les messages d’urgence exigés et le chef de train est retourné au passage à niveau pour aider les passagers de la fourgonnette. Le conducteur avait subi des blessures graves et était demeuré coincé dans son siège. Le conducteur surveillant 1 était demeuré dans le siège du passager avant et avait subi des blessures mineures. Les 4 autres passagers avaient été mortellement blessés.
Le personnel des services de police et d’incendie ainsi que le personnel ambulancier se sont rendus sur les lieux. Le conducteur a été dégagé de la fourgonnette et amené par avion à l’hôpital à Regina. Le conducteur surveillant 1 a été traité à un hôpital local et a ensuite reçu son congé.
Au moment de l’événement, le temps était ensoleillé, la température était de 19 °C et les vents soufflaient du sud-est à une vitesse de 19 km/h. Le soleil était bas à l’ouest, à quelque 15,2 degrés au-dessus de l’horizon. Ce jour-là, le soleil s’est couché à 20 h 28.
1.2 Actions du conducteur
La fourgonnette se déplaçait vers l’est sur l’autoroute 1 à une vitesse autorisée, soit environ 110 km/h (environ 70 mi/h) depuis environ 1 ¾ heure. Pendant la majeure partie de ce temps, les passagers prenant place à l’arrière ont regardé des vidéos et écouté de la musique. Le conducteur surveillant 2 était assis derrière le conducteur et discutait avec le conducteur surveillant 1 et le conducteur.
À l’approche d’Airport Road (route provinciale 201), la fourgonnette s’est déplacée à droite, sur la voie de présélection pavée, et a ralenti presque au point mort avant de tourner vers le sud (à droite) sur Airport Road (figure 2).
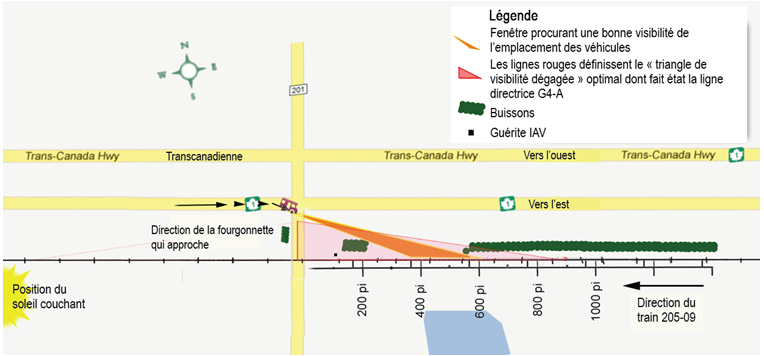
Le conducteur a regardé à gauche pour voir si un train arrivait de l’est (photo 1) avant de se diriger vers le passage à niveau (photo 2). Ne voyant aucun train arrivant de l’est, le conducteur a regardé à droite pour voir si un train arrivait de l’ouest (photo 3). À l’ouest, la vue donnait directement sur le soleil couchant; les broussailles se trouvant le long de la route et de l’emprise masquaient partiellement les voies.


Après avoir tourné, le conducteur a brièvement accéléré à près de 28 km/h, puis a ensuite ralenti à environ 18 km/h à proximité du passage à niveau. Juste avant d’atteindre le passage à niveau, le conducteur a de nouveau regardé vers la gauche (vers l’est) et a constaté qu’un train approchait, cadré entre la guérite de signalisation et le passage à niveau (photo 4). Le conducteur a accéléré au dernier moment, mais il était trop tard pour éviter la collision. Les coussins gonflables se sont déployés au moment de l’accident.


1.3 Examen des lieux
La locomotive de tête a subi des dommages mineurs, mais le train n’a pas déraillé. La fourgonnette a été projetée sur une courte distance et s’est immobilisée dans le fossé au sud et à l’ouest du passage à niveau. L’avant de la cabine côté conducteur a été écrasé, tandis que les zones occupées par les deuxième et troisième rangées de sièges étaient si comprimées que les passagers occupant ces sièges avaient peu de chances de survie. Il y avait des éraflures sur les éléments en bois du passage à niveau et dans le ballast. Le poteau indicateur situé du côté ouest du passage à niveau était plié.
Au cours de l’examen des lieux, on a fait les constatations suivantes :
- il y avait 2 bosquets et des buissons du côté nord de l’emprise ferroviaire, à l’est du passage à niveau;
- ces arbres et ces buissons empêchent les conducteurs des véhicules se déplaçant vers l’est sur l’autoroute 1 et les conducteurs tournant vers le sud sur Airport Road de bien voir les trains en provenance de l’est;
- une partie de cette végétation se trouvait à une distance de 160 pieds à 210 pieds à l’est du passage à niveau; l’autre partie était une ligne continue d’arbres commençant à environ 530 pieds du passage à niveau, limitant les lignes de visibilité à moins de 700 pieds pour les véhicules qui tournaient;
- à l’ouest du passage à niveau, il y avait des buissons le long de la route et des voies qui obstruaient la vue des conducteurs vers l’ouest;
- la rampe de l’approche du passage à niveau vers le sud empêchait les conducteurs de bien voir la route au-delà du passage à niveau.
1.4 Information consignée et calcul de la vitesse de la fourgonnette
Le Laboratoire du BST a recueilli et examiné l’information tirée de l’enregistreur d’événements de la locomotive et de la caméra vidéo orientée vers l’avant de la locomotive. Une analyse image par image de la vidéo a été effectuée pour déterminer l’emplacement relatif, la vitesse et la position de la fourgonnette et du train à mesure qu’ils approchaient tous deux du passage à niveau.
La vitesse du véhicule a été calculée d’après une analyse des images adjacentes de la vidéo afin de déterminer le déplacement au fil du temps. Il a été possible de mesurer les changements de position le long du plan de l’image en employant un ratio du nombre de pixels correspondant à une distance connue. Dans le cas présent, la distance connue était l’espace entre les rails. Compte tenu du petit angle de la perpendiculaire de la voie à la route, la vitesse calculée différait légèrement de la vitesse véritable. Les résultats sont consignés au tableau 1.
| Image | Vitesse d’approche du véhicule (km/h) | Distance du véhicule par rapport au passage à niveau (pieds) | Heure (hhmm:ss,ss) | Vitesse du train (mi/h) | point milliaire | Distance du train par rapport au passage à niveau (pieds) | Temps avant la collision (secondes) |
|---|---|---|---|---|---|---|---|
| 1735 | 19 h 32 m 19,00 s | ||||||
| 1745 | 132,4 | 19 h 32 m 19,67 s | 53,2 | 128,791 | 577,5 | 7,33 | |
| 1750 | 3,3 | 131,4 | 19 h 32 m 20,00 s | 53,2 | 128,796 | 551,5 | 7,00 |
| 1755 | 24,3 | 124,1 | 19 h 32 m 20,33 s | 53,2 | 128,800 | 525,5 | 6,67 |
| 1760 | 25,9 | 116,3 | 19 h 32 m 20,67 s | 53,2 | 128,805 | 499,4 | 6,33 |
| 1765 | 25,0 | 108,7 | 19 h 32 m 21,00 s | 53,2 | 128,810 | 473,4 | 6,00 |
| 1770 | 25,6 | 101,0 | 19 h 32 m 21,33 s | 53,2 | 128,815 | 447,4 | 5,67 |
| 1775 | 23,7 | 93,9 | 19 h 32 m 21,67 s | 53,2 | 128,820 | 421,4 | 5,33 |
| 1780 | 21,7 | 87,4 | 19 h 32 m 22,00 s | 53,2 | 128,825 | 395,4 | 5,00 |
| 1785 | 20,0 | 81,3 | 19 h 32 m 22,33 s | 53,2 | 128,830 | 369,4 | 4,67 |
| 1790 | 21,8 | 74,8 | 19 h 32 m 22,67 s | 53,2 | 128,835 | 343,4 | 4,33 |
| 1795 | 23,6 | 67,7 | 19 h 32 m 23,00 s | 53,2 | 128,840 | 317,4 | 4,00 |
| 1800 | 24,8 | 59,3 | 19 h 32 m 23,33 s | 53,2 | 128,845 | 291,4 | 3,67 |
| 1805 | 26,5 | 52,2 | 19 h 32 m 23,67 s | 53,2 | 128,850 | 265,4 | 3,33 |
| 1810 | 27,3 | 44,0 | 19 h 32 m 24,00 s | 53,2 | 128,855 | 239,4 | 3,00 |
| 1814 | 24,9 | 38,0 | 19 h 32 m 24,27 s | 53,2 | 128,859 | 218,6 | 2,73 |
| 1815 | 24,7 | 36,5 | 19 h 32 m 24,33 s | 53,2 | 128,860 | 213,4 | 2,67 |
| 1819 | 21,8 | 31,3 | 19 h 32 m 24,60 s | 53,2 | 128,864 | 192,5 | 2,40 |
| 1820 | 20,7 | 30,0 | 19 h 32 m 24,67 s | 53,2 | 128,865 | 187,3 | 2,33 |
| 1821 | 20,3 | 28,8 | 19 h 32 m 24,73 s | 53,2 | 128,866 | 182,1 | 2,27 |
| 1824 | 19,1 | 25,4 | 19 h 32 m 24,93 s | 53,2 | 128,868 | 166,5 | 2,07 |
| 1825 | 19,5 | 24,2 | 19 h 32 m 25,00 s | 53,2 | 128,869 | 161,3 | 2,00 |
| 1826 | 18,6 | 23,1 | 19 h 32 m 25,07 s | 53,2 | 128,870 | 156,1 | 1,93 |
| 1829 | 18,7 | 19,7 | 19 h 32 m 25,27 s | 53,2 | 128,873 | 140,5 | 1,73 |
| 1830 | 19,1 | 18,6 | 19 h 32 m 25,33 s | 53,2 | 128,874 | 135,3 | 1,67 |
| 1831 | 19,4 | 17,4 | 19 h 32 m 25,40 s | 53,2 | 128,875 | 130,1 | 1,60 |
| 1834 | 18,7 | 14,0 | 19 h 32 m 25,60 s | 53,2 | 128,878 | 114,5 | 1,40 |
| 1835 | 18,2 | 12,9 | 19 h 32 m 25,67 s | 53,2 | 128,879 | 109,3 | 1,33 |
| 1836 | 18,1 | 11,8 | 19 h 32 m 25,73 s | 53,2 | 128,880 | 104,1 | 1,27 |
| 1839 | 19,8 | 8,2 | 19 h 32 m 25,93 s | 53,2 | 128,883 | 88,5 | 1,07 |
| 1840 | 20,3 | 7,0 | 19 h 32 m 26,00 s | 53,2 | 128,884 | 83,3 | 1,00 |
| 1841 | 20,3 | 5,8 | 19 h 32 m 26,07 s | 53,2 | 128,885 | 78,1 | 0,93 |
| 1844 | 21,3 | 2.0 | 19 h 32 m 26,27 s | 53,2 | 128,888 | 62,5 | 0,73 |
| 1845 | 21,8 | 0,7 | 19 h 32 m 26,33 s | 53,2 | 128,889 | 57,3 | 0,67 |
| 1855 | Collision | 0 | 19 h 32 m 27,00 s | 53,2 | 128,899 | 0 | 0 |
1.5 Enregistreurs de données du véhicule
La fourgonnette Ford E-350 2007 n’était pas pourvue d’un module informatique spécial qui enregistre les données de conduite. Toutefois, le véhicule était doté des modules électroniques suivants, lesquels peuvent fournir certains paramètres relatifs à son fonctionnement et aux collisions en cas de déploiement des coussins gonflables :
- Le module de commande des dispositifs de retenue déploie les prétendeurs des boucles des ceintures de sécurité et les coussins gonflables lors d’une collision frontale. Ce module peut enregistrer les forces d’accélération longitudinales en jeu durant une collision frontale, et il envoie également un signal de déploiement au module de commande du groupe motopropulseur par le réseau de commande du véhicule.
- Le module de commande du groupe motopropulseur régit le fonctionnement du moteur du véhicule et sa transmission, en fonction des données fournies par les différents capteurs. Lorsque le module de commande du groupe motopropulseur reçoit un signal de déploiement du module de commande des dispositifs de retenue, il consigne les 20 dernières secondes de certains paramètres de fonctionnement du véhicule dans une mémoire rémanente.
- Les données saisies portent sur le déploiement des dispositifs de retenue, la vitesse du véhicule, la position de l’accélérateur, la commande de puissance, le serrage des freins et le système de freinage automatique. En outre, ces données indiquent si la transmission était ou non en position neutre.
- Le module de commande du groupe motopropulseur requiert de l’électricité pendant au moins quelques dixièmes de seconde après une collision pour conserver les données.
Le Laboratoire du BST a récupéré et examiné le module de commande du groupe motopropulseur de la fourgonnette. On a fait les constatations suivantes :
- Bien que les prétendeurs des ceintures de sécurité se soient actionnés et que les coussins gonflables se soient déployés, le module de commande du groupe motopropulseur n’a pas reçu de signal de déploiement des dispositifs de retenue; par conséquent, les données sur l’accident ont été écrasées.
- La ligne de communication du réseau de commande du véhicule a peut-être été abîmée durant l’impact initial avec le train, ce qui est survenu avant le signal de déploiement des coussins gonflables et a probablement empêché la transmission des données du module de commande des dispositifs de retenue au module de commande du groupe motopropulseur.
1.6 Renseignements sur la subdivision et la voie
La subdivision de Broadview comprend une voie principale unique. Cette subdivision est exploitée selon la commande centralisée de la circulation (CCC), autorisée en vertu du Règlement d’exploitation ferroviaire du Canada (REF), sous la surveillance d’un contrôleur de la circulation ferroviaire (CCF) du CP posté à Calgary (Alberta). La vitesse autorisée maximale au voisinage de l’accident est de 60 mi/h. À cet endroit, il passe en moyenne 23 trains de marchandises par jour.
La voie au passage à niveau est en alignement droit et en palier, armée en longs rails soudés de 115 lb. La voie était en bon état et satisfaisait aux exigences du Règlement sur la sécurité de la voie approuvé par Transports Canada (TC). Au voisinage de l’accident, la dernière inspection de la voie par véhicule rail-route effectuée par le CP avait eu lieu le 7 août 2012; aucune anomalie n’avait alors été relevée.
1.7 Renseignements sur le passage à niveau et la route
Pour les routes à faible circulation, les passages à niveau publics sont habituellement équipés de panneaux indicateurs de passage à niveau standard réfléchissants (croix de Saint-André) montés sur des poteaux de bois. Ces panneaux indiquent que les conducteurs doivent céder le passage aux trains. Il s’agit également d’une exigence précisée dans les codes de la route provinciaux et la Loi sur la sécurité ferroviaire. Le poteau sur lequel est monté le panneau indicateur de passage à niveau standard peut également être pourvu d’un panneau d’arrêt. Ce dernier peut également se trouver sur l’approche routière. Les passages à niveau pourvus de ces dispositifs de sécurité sont désignés sous le nom de passages à niveau publics passifs.
Les passages à niveau publics où des routes à grande circulation routière croisent des lignes de chemin de fer à plusieurs voies, à grande vitesse et à forte densité de trafic sont habituellement équipés de dispositifs d’avertissement automatiques. Ces dispositifs comprennent généralement des feux clignotants, des cloches et, souvent, des barrières automatiques.
Les risques inhérents aux passages à niveau varient selon le type de protection assuré (p. ex., dispositifs d’avertissement automatiques, panneaux indicateurs de passage à niveau standard ou panneaux indicateurs de passage à niveau standard et panneaux indicateurs d’arrêt) et les dangers propres à un passage à niveau particulier. Lorsque l’on compare les statistiques relatives aux accidents aux passages à niveau, seuls les passages à niveau présentant une protection et des dangers similaires doivent être pris en compte.
En ce qui a trait aux passages à niveau publics passifs, la zone visée par les travaux d’entretien incombant au chemin de fer va jusqu’à un point situé à 18 po (46 cm) au-delà des rails extérieurs, et le chemin de fer est également tenu d’entretenir les lignes de visibilité le long de l’emprise ferroviaire. L’autorité routière est responsable de l’entretien de la portion de la structure routière se trouvant au-delà des limites du chemin de fer, de l’élimination des éléments obstruant les lignes de visibilité sur les terrains municipaux et de l’installation de la signalisation routière au besoin. La géométrie de la voie dans le voisinage du passage à niveau doit également être conforme au Règlement sur les passages à niveau de TC.
Airport Road est une route en gravier à 2 voies d’une largeur de 24 pieds et à orientation nord-sud qui croise la subdivision de Broadview à un angle de 90°. À partir de l’autoroute 1, la route forme une rampe ascendante de 5,1 % sur environ 185 pieds jusqu’au passage à niveau sans dispositif d’avertissement automatique situé au sud de l’autoroute 1. La vitesse routière affichée est de 80 km/h au voisinage du passage à niveau. Des panneaux indicateurs de passage à niveau standard montés sur des poteaux en bois de chaque côté de la voie indiquent la présence du passage à niveau. Un panneau indicateur avancé se trouve sur l’approche sud, mais l’approche nord ne comporte aucun signal entre l’autoroute 1 et les voies. Les jours de semaine, il passe en moyenne sur Airport Road, à cet endroit, environ 60 véhicules quotidiennementNote de bas de page 2.
Selon les dossiers du BST, un autre accident est survenu au passage à niveau Airport Road en 2002. L’accident est arrivé en hiver, lorsqu’un véhicule a glissé dans la trajectoire d’un train qui arrivait. Trois occupants du véhicule avaient subi des blessures (événement R02W0191 du BST).
1.8 Aperçu de la réglementation
La Loi sur la sécurité ferroviaire (LSF)Note de bas de page 3 instaure le cadre de réglementation et d’application de la sécurité ferroviaire, y compris la sécurité aux passages à niveau. De manière plus précise, elle s’énonce comme suit :
- L’alinéa 24(1)e) de la LSF délègue à TC le pouvoir de créer des règlements relativement au retrait de tout élément, y compris des arbres, des broussailles et des structures, empêchant de bien voir une route ou une voie ferrée et constituant une menace pour la sécurité de l’exploitation ferroviaire.
- Selon l’article 26.2 de la LSF, les usagers d’une route doivent céder le passage à un train qui approche et le conducteur du train doit faire en sorte que les usagers de la route bénéficient d’un avertissement adéquat afin de pouvoir prendre les mesures de protection appropriées.
- L’article 31 de la LSF délègue à un inspecteur de la sécurité ferroviaire le pouvoir de fermer un passage à niveau ou d’en restreindre l’utilisation. De manière plus précise, un inspecteur de la sécurité ferroviaire peut ordonner aux parties responsables la réparation ou l’amélioration d’un passage à niveau s’il juge que ce dernier pose une menace immédiate pour la sécurité de l’exploitation ferroviaire. Toutefois, l’autorité de l’inspecteur de la sécurité ferroviaire est restreinte par le paragraphe 31(4), qui indique ce qui suit : « l’inspecteur ne peut, lorsque les normes de construction ou d’entretien sont conformes aux règlements, règles ou injonctions ministérielles pertinents à cet égard, conclure qu’elles risquent de compromettre la sécurité ferroviaire ». Une fois qu’un inspecteur de la sécurité ferroviaire a émis un « ordre », les restrictions demeurent en vigueur jusqu’à ce que l’inspecteur détermine que la menace a été éliminée.
Il existe des règlements qui portent sur la visibilité des locomotives et du matériel roulant et la conception des passages à niveau. Toutefois, le règlement actuel régissant les passages à niveau passifs, intitulé Règlement sur les passages à niveau au croisement d’un chemin de fer et d’une voie publique (CTC 1980-8 RAIL, SOR/80-748, 18 septembre 1980), ne comporte pas d’exigences en matière de lignes de visibilité et ne s’applique pas aux passages à niveau conçus avant janvier 1981, tel que le passage à niveau d’Airport Road.
TC mène actuellement des consultations sur le Règlement sur les passages à niveau proposé, conformément à la Loi sur la sécurité ferroviaire. Ce règlement est au stade de l’ébauche depuis près de 25 ans. Durant toutes ces années, il y a eu dialogue continu avec l’industrie et les autorités provinciales et municipales concernées. Le règlement proposé indique les responsabilités des partenaires concernés pour faire en sorte que les mesures de sécurité aux passages à niveau demeurent conformes aux normes appropriées. Le projet de règlement incorpore également par renvoi le projet de Normes sur les passages à niveauNote de bas de page 4 qui énonce les pratiques d’ingénierie recommandées et les modalités d’exploitation relatives à la sécurité aux passages à niveau. Le RTD 10 est largement utilisé comme directive dans l’industrie depuis de nombreuses années. TC s’attendait autrefois à ce que le projet de règlement soit publié dans la Partie 1 de la Gazette du Canada au printemps 2002, mais cela ne s’est pas fait à la date prévue.
Le BST a enquêté sur un certain nombre d’accidents qui renvoyaient au nouveau règlement sur les passages à niveau. Dans son rapport d’enquête R99T0298, le BST reconnaissait que TC avait accompli de grands progrès au cours des 10 à 13 dernières années dans l’élaboration d’un nouveau règlement sur les passages à niveau. Toutefois, le Bureau craignait que le remplacement du règlement en vigueur, minimal et essentiellement obsolète, ne prenne un certain temps. Le Bureau a déterminé que le délai de publication du nouveau règlement nuisait à la sécurité aux passages à niveau, et a subséquemment recommandé :
Que le ministère des Transports accélère la promulgation du nouveau règlement sur les passages à niveau.
(R01-05, émis en 2001)
Dans son rapport d’enquête R99T0147, le BST a déclaré que les délais continus dans le processus réglementaire visant à résoudre ce problème exposaient encore les automobilistes à des risques. Bien qu’il ait déjà été recommandé, par le passé (R01-05), d’accélérer la publication du Règlement sur les passages à niveau, le processus s’éternisait. Le Bureau a donc recommandé que :
Le ministère des Transports mette en œuvre de nouvelles procédures relatives aux passages à niveau, sans délai, peu importe le statut du règlement proposé.
(R03-03, émis en 2003)
Bien que le nouveau règlement sur les passages à niveau soit en cours d’élaboration depuis près de 25 ans, il est encore au stade de l’ébauche. Dans l’intervalle, la ligne directrice G4-A, Exigences minimales relatives aux lignes de visibilité à tous les passages à niveau non munis de dispositifs d’avertissement automatiques (annexe A) a été créée pour résoudre les problèmes relatifs aux lignes de visibilité aux passages à niveau passifs. Bien que le document G4-A ne soit qu’une ligne directrice, il est largement utilisé par les chemins de fer et les autorités routières au Canada en guise de référence pour l’entretien adéquat des lignes de visibilité aux passages à niveau. La ligne directrice G4-A précise qu’une zone de visibilité dégagée triangulaireNote de bas de page 5 doit être maintenue dans chaque quadrant du passage à niveau. Les lignes de visibilité sont définies par les éléments suivants :
- la distance du véhicule par rapport au centre de la voie;
- la vitesse routière autorisée maximale pour les véhicules routiers (en km/h);
- la vitesse ferroviaire autorisée maximale pour la zone (en mi/h).
La note 1 de la ligne directrice G4-A donne comme instruction aux usagers « d’utiliser les vitesses maximales permises pour les trains et les véhicules routiers afin d’établir la zone de visibilité dégagéeNote de bas de page 6. »
Selon l’ébauche des Normes sur les passages à niveau RTD-10, la vitesse d’exploitation du véhicule (routier) est la vitesse réelle du véhicule à la distance de visibilité d’arrêt sécuritaire, qui est soit :
- la limite de vitesse maximale légale (affichée ou non);
- la vitesse obligatoire affichée;
- la vitesse d’exploitation signalée où des contraintes, telles que des dispositifs de régulation du trafic placés aux intersections sur les approches routières, ou des restrictions physiques, comme des courbes, restreignent la vitesse des véhicules, ou établie selon les résultats d’une étude d’ingénierie de la circulation.
Aucun règlement de TC ne régit de manière précise la fréquence des inspections des lignes de visibilité.
1.9 Inspections de Transports Canada
La dernière inspection de la voie effectuée par TC dans la subdivision de Broadview avait eu lieu les 29 et 30 mai 2012. Le rapport d’inspection faisait état de 17 lacunes, notamment des lignes de visibilité inadéquates pour le passage à niveau au point milliaire 121,63. Aucun problème au niveau des lignes de visibilité n’a été relevé au passage à niveau d’Airport Road au point milliaire 128,90.
TC a effectué une inspection détaillée du passage à niveau d’Airport Road le 2 août 2011, et une autre inspection le 21 août 2012, après que des mesures aient été prises pour remédier au problème relatif aux lignes de visibilité à la suite de l’accident en cause. Le tableau 2 fait état des lignes de visibilité consignées au cours des 2 inspections des passages à niveau :
| Date de l’inspection | Ligne de visibilité vers l’est (en pieds) | Ligne de visibilité vers l’ouest (en pieds) | ||
|---|---|---|---|---|
| Approche du passage à niveau en direction sud en provenance de l’autoroute 1 | Approche du passage à niveau en direction nord vers l’autoroute 1 | Approche du passage à niveau en direction sud en provenance de l’autoroute 1 | Approche du passage à niveau en direction nord vers l’autoroute 1 | |
| 02 août 2011 | 500 | 1500 | 400 | 400 |
| 21 août 2012 | 687 | 1500 | 897 | 1300 |
Aux fins de l’inspection des passages à niveau effectuée le 2 août 2011, TC a défini une vitesse d’exploitation routière maximale de 30 km en raison de la proximité du passage à niveau par rapport à l’autoroute 1. Pour une vitesse routière définie de 30 km/h et une vitesse ferroviaire maximale de 60 mi/h, la ligne directrice G4-A prescrit une ligne de visibilité dégagée de 273 mètres (900 pieds) depuis le passage à niveau, le long de la voie, à partir de l’intérieur d’une distance de 30 mètres (souhaitée) ou de 20 mètres (minimale) le long de la route, de chaque côté du passage à niveau. Les résultats de l’inspection de TC ne correspondaient pas à la ligne directrice G4-A. Rien n’indique que les résultats de cette inspection ont été communiqués au CP.
1.10 Inspections des passages à niveau et des lignes de visibilité par le Chemin de fer Canadien Pacifique
La Notice technique (NT) 29 - Passages à niveau du CP datée du 24 mars 2010, spécifie les valeurs « souhaitées » de la ligne directrice G4-A en guise de norme d’ingénierie. En fonction de la valeur souhaitée, la NT 29 exige une ligne de visibilité dégagée de 273 mètres (900 pieds) du passage à niveau, le long de la voie, à partir d’une distance de 30 mètres le long de la route, de chaque côté du passage à niveau. Le CP n’est pas tenu d’effectuer des inspections des passages à niveau officielles sur une base régulière, à moins qu’il n’y ait eu une collision entre un véhicule et un train à un passage à niveau. À la suite d’une telle collision, la partie (2)f de la NT 29 stipule que l’on doit procéder à une inspection complète du passage à niveau pour déterminer si ce dernier satisfait aux exigences réglementaires. L’inspection complète du passage à niveau comprend généralement, sans s’y limiter :
- l’inspection de la déclivité des approches routières;
- l’inspection de la surface du passage à niveau, y compris les planches, le béton ou l’asphalte;
- l’inspection de l’état de la voie au passage à niveau;
- la mesure des lignes de visibilité disponibles;
- l’examen de l’activité routière.
Le programme d’amélioration des lignes de visibilité aux passages à niveau du CP est un programme régional de débroussaillement dont la planification des activités se fait en fonction des caractéristiques de croissance de la végétation observées dans la région considérée. Dans les zones où les précipitations sont élevées et les saisons végétatives longues (p. ex., la côte sud de la Colombie-Britannique ou le sud-ouest de l’Ontario) on effectue des rotations de traitement cibles de 2 à 3 ans, tandis que dans les zones plus sèches où les saisons végétatives sont plus courtes (p. ex., les Prairies) on effectue des rotations de traitement cibles de 4 à 5 ans. En outre, le soutien des activités prévues est fonction des communications avec les autorités locales et régionales.
Les gestionnaires et les superviseurs locaux du CP font régulièrement une ronde dans leurs territoires respectifs, conformément aux normes de l’entreprise et aux lignes directrices de TC. Les défauts de la voie et les autres problèmes de sécurité potentiels sont consignés. Dans les cas où des mesures correctives immédiates s’imposent, du personnel et du matériel d’entretien sont mobilisés. Les activités de plus grande envergure relatives aux lignes de visibilité des passages à niveau exigent les ressources du directeur du programme de gestion de la végétation. La rotation des traitements de la végétation régionaux est rajustée et priorisée au besoin.
Les activités locales sont également soutenues par la direction des travaux publics, de concert avec les municipalités et les autorités routières pour coordonner les projets d’amélioration des passages à niveau et les opérations relevant du secteur de l’immobilier qui entraînent la mise à jour d’ententes d’entretien et de fermeture des passages à niveau. Toutes conditions urgentes relatives aux lignes de visibilité et observées au cours d’activités de vérification sont communiquées à la direction locale qui doit prendre les mesures correctives nécessaires.
En outre, TC effectue des inspections périodiques des passages à niveau et communique au CP toute lacune observée, qu’elle consigne dans son rapport d’inspection. À l’occasion, d’autres parties transmettent des informations sur les lignes de visibilité.
1.11 Mesures de débroussaillement des lignes de visibilité aux passages à niveau
Les subdivisions de Broadview et d’Indian Head devaient faire l’objet du programme d’amélioration des lignes de visibilité aux passages à niveau en 2012. Dans la subdivision de Broadview, 128 passages à niveau ont été soumis à des activités de coupe et de pulvérisation. Les activités menées dans la subdivision de Broadview se sont échelonnées sur 8 jours au début de juin 2012. Elles ont consisté notamment à traiter certains sites se trouvant entre le point milliaire 3,7 et le point milliaire 127,18. Entre le 25 juillet 2012 et le 9 août 2012, différents passages à niveau entre le point milliaire 81 et le point milliaire 127,5 ont été traités. Le temps d’occupation de la voie et la disponibilité des camions d’entretien ont eu une incidence sur le choix des passages à niveau à traiter et l’ordre de leur traitement. La direction locale du CP a également dressé une liste restreinte comprenant environ 24 passages à niveau qui présentaient une priorité très élevée, en raison d’observations formulées par l’entreprise ou TC au cours d’une inspection récente; Airport Road ne figurait pas dans cette liste. En conséquence, la végétation de certains passages à niveau a été traitée en premier, et les autres devaient faire l’objet d’opérations de coupe et de pulvérisation à une date ultérieure. Dans l’ensemble, le programme d’amélioration des lignes de visibilité aux passages à niveau en Saskatchewan et au Manitoba a permis le traitement de 357 passages à niveau en 2011 et de 311 en 2012.
1.12 Programme de permis de conduire progressif
Le programme de permis de conduire progressif est une approche multiniveaux visant à aider les conducteurs débutants (peu importe leur âge) à acquérir de l’expérience de conduite, tout en gérant les risques qu’ils posent pour eux-mêmes et les autres, avant d’obtenir un permis de conduire doté de tous les privilèges. Le système de permis de conduire progressif tient également compte de certains facteurs relatifs à l’âge ou au style de vie qui font augmenter le risque de collision auquel sont exposés les jeunes automobilistes, et vise à réduire les possibilités qu’ils adoptent des comportements à risque ou qu’ils vivent des situations risquéesNote de bas de page 7.
Les éléments principaux des programmes de permis de conduire progressif s’énoncent comme suit : durée d’apprentissage prolongée (faisant passer les conducteurs débutants par des stades de conducteur apprenti et intermédiaire avant l’obtention d’un permis doté de tous les privilèges) et restrictions qui déterminent le moment et le lieu où le conducteur conduit, ainsi que le nombre et le type de passagers permis. Chaque province ou territoire canadien a élaboré son propre programme de permis de conduire progressif.
En Alberta, le programme de permis de conduire progressif est structuré comme suitNote de bas de page 8 :
- L’âge d’entrée dans l’étape 1 du système de permis de conduire progressif est de 14 ans, ce qui est inférieur de 2 ans à l’âge d’entrée de 16 ans en vigueur dans la plupart des autres provinces et territoires. Cette étape correspond au permis d’apprenti. Les restrictions relatives au permis d’apprenti demeurent en vigueur jusqu’à ce que le conducteur ait 16 ans et subisse un test sur route pour obtenir un permis de conduire, après quoi les critères de l’étape 2 du système de permis de conduire progressif s’appliquent. L’âge d’entrée plus précoce du programme de permis de conduire progressif de l’Alberta reflète la réalité des enfants en zone rurale, qui ont accès à des véhicules agricoles et ont l’occasion d’apprendre la maîtrise des véhicules sur la propriété rurale.
- Les conducteurs surveillants doivent avoir au moins 18 ans et être titulaires d’un permis doté de tous les privilèges. Cette situation est contraire à la pratique ayant cours dans la plupart des autres provinces et territoires, qui n’ont pas d’âge minimal spécifié pour les conducteurs surveillants, mais ont plutôt une période de probation de 1 à 4 ans avant l’obtention d’un permis doté de tous les privilèges pour les conducteurs surveillants.
- Le nombre de passagers transportés par un conducteur débutant ne peut excéder le nombre de ceintures de sécurité présentes dans un véhicule. Cette situation est contraire à la pratique ayant cours dans 6 provinces et territoires, qui restreignent le nombre de passagers autres que le conducteur surveillant. Terre-Neuve-et-Labrador, le Nouveau-Brunswick et la Nouvelle-Écosse ne permettent pas aux conducteurs débutants de transporter des passagers supplémentaires autres que le conducteur surveillant. La Colombie-Britannique et le Yukon permettent 1 passager en plus du conducteur surveillant, tandis que l’Île-du-Prince-Édouard n’autorise que le conducteur surveillant et les membres de sa famille.
Les lignes directrices provinciales et territoriales à l’intention des conducteurs surveillants figurent dans les manuels des formateurs. L’objectif est d’aider le conducteur surveillant à élaborer un plan d’encadrement qui présente graduellement le conducteur débutant à des situations de conduite de plus en plus complexes. Habituellement, les guides d’encadrement sont au diapason du programme d’enseignement des conducteurs. Le cahier d’exercices des formateurs de l’Alberta comporte une liste de vérification dont l’un des éléments porte sur l’évaluation du comportement du conducteur relativement aux passages à niveau sans dispositif d’avertissement automatique. Bien que le programme de permis de conduire progressif de l’Alberta recommande que tous les conducteurs soient bien reposés avant d’amorcer leur déplacement, il ne comprend ni conseils, ni stratégies de repos pour retrouver un rendement humain optimal.
Le programme de permis de conduire progressif de l’Alberta, à l’instar des programmes de permis de conduire progressif des autres provinces et territoires, ne fournit que des conseils de base sur l’approche des passages à niveau sans dispositif d’avertissement automatique, et met plutôt l’accent sur l’importance de céder le passage aux trains. Ces conseils n’indiquent pas que la plupart des gens sous-estiment la vitesse des trains et que les klaxons de train peuvent être inaudibles à l’intérieur d’une voiture en mouvement dont les fenêtres sont fermées. Dans l’événement en cause, le processus consistant à planifier le déplacement en tenant compte des pauses et des changements de conducteur a été conforme aux conseils généraux fournis par le programme de permis de conduire progressif de l’Alberta.
1.13 Âge et expérience du conducteur
Durant le voyage, le conducteur a pris le volant conformément aux modalités relatives à l’étape 1 du programme de permis de conduire progressif de l’Alberta, une personne possédant le permis adéquat (conducteur surveillant 1) prenant place dans le siège du passager avant. Le titulaire d’un permis de conduire émis en vertu de l’étape 1 du système de permis de conduire progressif de l’Alberta est autorisé à transporter des passagers et à conduire dans d’autres provinces, y compris la Saskatchewan, selon les mêmes modalités.
Le conducteur était à 1 semaine de son 16e anniversaire et devait subir la portion routière de l’examen menant à l’obtention du permis peu de temps après son anniversaire. Le conducteur manœuvrait des véhicules agricoles ainsi que des camions avec remorques depuis au moins 2 ans et était au fait des habiletés motrices nécessaires pour la conduite de véhicules. Toutefois, l’expérience antérieure du conducteur à l’égard des passages à niveau publics passifs se limitait à l’utilisation peu fréquente du passage à niveau en question, à l’occasion de visites chez sa parenté dans le secteur de Broadview. Il n’y avait aucun passage à niveau passif dans la ville où habitait le conducteur.
Les jeunes conducteurs novices détectent moins rapidement les dangers et ont tendance à repérer moins de dangers que les conducteurs expérimentés, plus particulièrement lorsque les dangers se trouvent à une certaine distanceNote de bas de page 9. Les conducteurs expérimentés ont tendance à étendre la portée de leur balayage visuel horizontal et vertical dans des situations dangereuses, tandis que les conducteurs moins expérimentés ne font normalement pas montre de la même souplesse.
1.14 Heures de veille
Au cours du voyage, des arrêts étaient prévus à Chestermere, Swift Current et Regina. Le véhicule a amorcé son voyage à 4 h 30. C’est le conducteur surveillant 1 qui a conduit jusqu’à Chestermere. Environ 2 heures plus tard, lorsqu’est venu le moment de changer de conducteur, le conducteur surveillant 1 était éveillé en continu depuis 22,75 heures. Le conducteur surveillant 1 a dormi dans la fourgonnette pendant le trajet de 5 heures entre Chestermere et Swift Current, puis a ensuite repris le volant de Swift Current à Regina, où le conducteur a repris le volant sous la supervision du conducteur surveillant 1.
Le matin de l’événement, le conducteur s’est réveillé environ 2,25 heures plus tôt que son heure de lever habituelle pour aller au travail, soit 7 h 30, et n’avait dormi que 5,25 heures durant la nuit précédant le voyage. Cela représentait 3,25 heures de moins que le temps de sommeil moyen recommandé pour les adolescentsNote de bas de page 10 et 2,25 heures de moins que le temps de sommeil habituel du conducteur. Toutefois, le conducteur a eu l’occasion de faire des siestes dans la fourgonnette pendant la première partie du voyage, soit entre la ville de départ et Chestermere, puis de nouveau durant le trajet entre Swift Current et Regina, qui incluait un arrêt légèrement prolongé à Regina.
La qualité du sommeil diurne n’est pas équivalente, sur le plan biologique, à celle du sommeil nocturneNote de bas de page 11. Le sommeil diurne est généralement moins réparateur que le sommeil nocturne, car les humains sont physiologiquement programmés pour dormir durant les heures d’obscuritéNote de bas de page 12.
1.15 Effets de la fatigue
Pratiquement chaque fonction de l’organisme (p. ex., la température corporelle, la digestion, les niveaux hormonaux) suit des cycles quotidiens appelés rythmes circadiens. Les perturbations des rythmes circadiens peuvent nuire au rendement et au fonctionnement cognitifNote de bas de page 13, plus particulièrement durant les périodes où d’autres rythmes circadiens imposent le sommeil. Des mesures précises du rendement, par exemple le temps de réactionNote de bas de page 14, peuvent être particulièrement touchées.
Les baisses de rendement du conducteur ainsi que les périodes d’éveil prolongées et les perturbations des rythmes circadiens ont été citées tant dans la littérature sur les travaux de recherche menés sur le sujet que dans des rapports antérieurs du BSTNote de bas de page 15. Dans de tels cas, la fatigue inhérente à l’une des conditions ou aux deux est réputée nuire tant au rendement du conducteur qu’à son fonctionnement cognitif.
1.16 Comportement des conducteurs aux passages à niveau passifs
À l’approche d’un passage à niveau passif, un conducteur doit passer par 4 zones d’approche successives et distinctes. Dans chaque zone, le conducteur doit acquérir et traiter de l’information différenteNote de bas de page 16 ou poser certaines actions pour bien franchir le passage à niveau (figure 3).
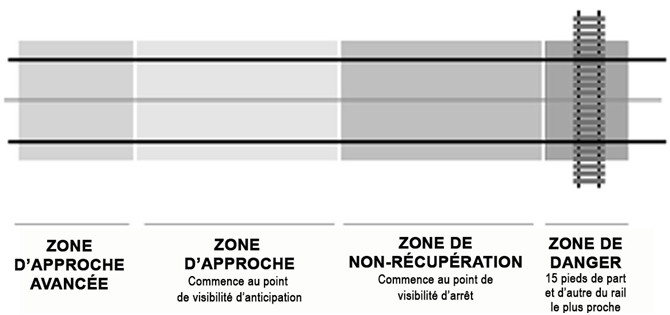
Un passage à niveau passif comporte les zones suivantes :
- Zone d’approche avancée : Les conducteurs acquièrent et traitent de l’information relative à la présence d’un passage à niveau et comprennent qu’ils sont responsables de leur propre sécurité et de la détection des trains qui arrivent. Cette information est vitale, car elle crée une anticipation chez le conducteur, qui peut le faire réagir de manière appropriée au passage à niveau ou l’empêcher de le faire, selon qu’un train est présent ou non. Dans l’événement en cause, la zone d’approche avancée commençait à l’autoroute 1 et prenait fin juste après que la fourgonnette ait tourné sur Airport Road.
- Zone d’approche : Les conducteurs détectent et reconnaissent le train (s’il y en a un), décident de l’action à prendre (p. ex., commencer à ralentir, maintenir la vitesse ou accélérer) et commencent à mettre en œuvre ladite action. Dans cette zone, le conducteur utilise l’information concernant les restrictions relatives aux lignes de visibilité, à la vitesse du train, à la distance par rapport au train et à la direction du train. Dans l’événement en cause, la zone d’approche commençait à environ 5 m après le virage sur Airport Road (à environ 180 pieds ou 54,8 mètres du passage à niveau) et se poursuivait jusqu’au dernier point auquel un freinage suffisant aurait pu être effectué pour permettre à la fourgonnette de s’arrêter en toute sécurité.
- Zone de non-récupération : Les conducteurs traitent l’information relative à la vitesse et à la distance du train, ainsi que celle relative à la vitesse du véhicule routier, au point d’arrêt prévu et à la distance par rapport aux voies. C’est à l’intérieur de cette zone qu’un conducteur doit arrêter le véhicule pour éviter une collision avec un train en approche. La zone de non-récupération correspond à la distance de freinage, et commence à la distance de visibilité d’arrêt (soit à environ 41 pieds ou à 12,5 mètres du passage à niveau). Dans l’événement en cause, pour une vitesse de circulation moyenne de 30 km/h (estimation de TC), un piètre coefficient de frottement de la chaussée (0,4) attribuable à sa surface de gravier et une rampe ascendante de 5,1 %, la zone de non-récupération (distance de freinage) est estimée à environ 26 pieds (7,9 mètres).
- Zone de danger : Les conducteurs doivent rester à l’écart de cette zone pour éviter une collision avec un train en approche ou qui se trouve au passage à niveau. La zone de danger se trouve à moins de 15 pieds (4,6 mètres) du rail le plus proche. Une accélération ou un freinage ne constitue pas une mesure de protection efficace une fois qu’un véhicule se trouve dans la zone de danger.
Afin que les conducteurs soient en mesure de détecter et de reconnaître un train à un passage à niveau, les lignes de visibilité à l’intérieur de la zone d’approche doivent être adéquates le long de la route d’approche, avant l’entrée dans la zone de non-récupération, pour que le conducteur puisse freiner suffisamment si un train approche du passage à niveau. Lorsque les conducteurs se déplacent dans la zone d’approche, la présence d’obstructions visuelles prolonge le temps de détection et de reconnaissance d’un train en approche et retarde l’application des freins en réaction à la situation. Ce délai constitue le temps de perception-réaction du conducteur. La prolongation du temps de perception-réaction du conducteur retarde le début du freinage. Plus la distance de freinage est déplacée de l’intérieur de la zone de non-récupération à la zone de danger, plus la probabilité de collision est grande.
Le temps de perception-réaction type utilisé pour la planification de la circulation et la conception des routes est de 2,5 secondes et repose sur l’hypothèse selon laquelle des indicateurs de collision actifs, par exemple les feux de freinage du véhicule suivi ou des dispositifs d’avertissement automatiques, sont visibles pour le conducteurNote de bas de page 17. Toutefois, ces hypothèses ne s’appliquent pas lorsque les conducteurs approchent d’un passage à niveau passif protégé uniquement par des panneaux indicateurs de passage à niveau standard et que le train ne se trouve pas déjà dans le champ de vision du conducteur. Dans de tels cas, le conducteur doit regarder dans les deux directions pour voir si des trains approchent. L’intervalle de refocalisation total nécessaire pour diriger son regard de l’avant vers un côté (0,74 seconde), puis vers l’autre côté et le ramener à l’avant (1,08 seconde) est d’environ 1,82 secondeNote de bas de page 18. En conséquence, un temps de perception et de réaction plus réaliste pour les approches des passages à niveau passifs serait d’environ 4,5 secondes (2,5 s + 0,74 s + 1,08 s = 4,32 s).
Les directives relatives aux lignes de visibilité minimales énoncées dans la ligne directrice G4-A de TC pour les passages à niveau passifs (annexe A) reposent sur le temps de perception-réaction du conducteur couramment utilisé, soit 2,5 secondes.
1.17 Facteurs ayant une incidence sur la détection des trains
Les conducteurs doivent compter sur des lignes de visibilité dégagées leur permettant de voir le train pendant un délai suffisant à l’approche d’un passage à niveau afin de déterminer avec précision si un train est présent et s’il est en mouvement. Voici les facteurs ayant une incidence sur la détection des trains :
- Tendance à la présomption du conducteur - Comme les conducteurs rencontrent rarement un train à un passage à niveau en zone rurale, ils pourraient présumer qu’ils ne rencontreront pas de train. Afin que le conducteur surmonte cette présomption, il faudrait qu’un train soit bien visible, que le conducteur le reconnaisse et qu’il détermine que ce train approche.
- Faible visibilité - Le train doit se détacher nettement du paysage.
- Image rétinienne inchangée - Lorsqu’un conducteur regardant la route devant lui est sur le point d’entrer en collision avec un objet approchant depuis le côté, par exemple un train en approche d’un passage à niveau, il peut ne pas y avoir de mouvement important de l’image rétinienne. Cette absence de mouvement réduit la probabilité qu’un conducteur perçoive la présence du train, à moins que le conducteur ne regarde directement dans cette direction.
- Audibilité du klaxon de train - Les klaxons de train sont souvent décrits comme des systèmes d’alerte secondaires, car leur efficacité dépend de leur emplacement, de la vitesse du train et du fait que leur son est étouffé par la carrosserie du véhicule routierNote de bas de page 19.
1.18 Renseignements sur le klaxon de train
La règle 14 du REF régit l’utilisation des signaux par klaxon d’une locomotive. La règle 14(l) stipule que le klaxon doit être actionné à chaque poteau commandant de siffler, à raison de 2 coups longs, 1 coup bref et 1 coup prolongé. Les trains circulant à plus de 44 mi/h actionnent le klaxon de locomotive 1/4 mille (384 mètres) avant le passage à niveau; le signal doit être prolongé ou répété jusqu’à ce que le passage à niveau soit entièrement occupé.
L’article 11.2 du Règlement relatif à l’inspection et à la sécurité des locomotives de chemin de fer de TC (4 février 2010) stipule ce qui suit :
Les locomotives autres que celles employées en service désigné doivent, lorsqu’on les utilise en position de commande, être équipées [de] […] :
- Un avertisseur capable de produire un niveau sonore minimal de 96 dB(A)Note de bas de page 20 en tout point d’un arc de 30 mètres (100 pieds) de rayon sous-tendu devant la locomotive par des angles de 45 degrés à gauche et à droite de l’axe de la voie dans le sens du déplacement.
Une étude du Centre de développement des transports (CDT) portant surNote de bas de page 21 l’efficacité des klaxons de locomotive a permis de déterminer ce qui suit :
- Le niveau sonore des klaxons devrait être d’au moins 10 (dB)A au-dessus du bruit ambiant pour être reconnaissable comme signal auditif de danger.
- Dans le cas d’un klaxon monté près du point médian longitudinal, le niveau de pression acoustique global du klaxon, mesuré à l’avant du train en mouvement, est inférieur, dans une mesure allant jusqu’à 18 dB(A), entre 13 et 14 degrés de la ligne centrale de la locomotive, au niveau de pression acoustique global du klaxon mesuré lorsque le train est immobile.
- Dans le cas d’un klaxon monté près du point médian, la qualité spectrale diminue à un point tel que le son se démarque mal du bruit de fond. En conséquence, un klaxon de train d’un niveau sonore de 114 dB(A) mesuré à 100 pieds ne générerait que 96 dB(A) vers l’avant du train lorsque celui-ci se déplace à une vitesse de 60 mi/h. Les études citées dans le rapport de TC recommandent d’utiliser une valeur de 30 dB(A) comme perte sonore type causée par la carrosserie d’un véhicule.
Un certain nombre d’enquêtes du BSTNote de bas de page 22 ont permis de conclure que l’efficacité du klaxon pouvait être compromise en raison à la fois de l’emplacement du klaxon sur la locomotive et des niveaux de bruit ambiant à l’intérieur du véhicule routier. Le train en cause, qui se déplaçait à une vitesse de 53 mi/h, comportait un klaxon monté en son point médian et pourvu de 3 cornets. Selon les données du CDT, ce type de klaxon générerait un niveau sonore de 96 dB(A) à 100 pieds du passage à niveau. Les fenêtres de la fourgonnette étaient fermées, ce qui a occasionné une perte supplémentaire de 30 dB(A). Le bruit de fond dans la fourgonnette se composait possiblement du son du lecteur de DVD pour les enfants assis à l’arrière, de la conversation des adultes et du bruit causé par le passage du véhicule sur une route de gravier à une vitesse allant de 18 à 28 km/h. Il est estimé que le son à l’intérieur du véhicule était d’au moins 67 dB(A). Lorsque le train se trouvait à une distance de 100 pieds de la fourgonnette, le rapport signal bruit du klaxon de train serait calculé ainsi :
- Niveau sonore en dB(A) du klaxon de train - perte sonore en dB(A) causée par la carrosserie du véhicule – bruit de fond dans la fourgonnette = rapport signal-bruit du klaxon de train;
le rapport signal-bruit du klaxon de train aurait été :
- 96 dB(A) - 30 dB(A) - 67 dB(A) = -1 dB(A)
En outre, pour chaque réduction de moitié de la distance entre le klaxon de train et la fourgonnette, le rapport signal-bruit augmente de 6 dB(A) :
- À 50 pieds, le rapport signal-bruit est de 5 dB(A).
- À 25 pieds, le rapport signal-bruit est de 11 dB(A).
- À 12,5 pieds, le rapport signal-bruit est de 17 dB(A).
1.19 Facteurs influant sur la prise de décisions du conducteur
Les conducteurs appelés à franchir un passage à niveau passif doivent accomplir 4 sous-tâches principales : recevoir l’information que leurs sens leur transmettent, traiter cette information, prendre une décision et passer à l’action. Les facteurs humains cognitifs suivants ont été liés à l’aptitude d’un conducteur à franchir avec succès un passage à niveau passif pourvu de panneaux indicateurs de passage à niveau standard :
- Activation fautive du schéma / modèle mental - Les attentes et les connaissances relatives à une situation donnée sont souvent désignées sous le nom de schémas ou de modèles mentaux. Les gens développent ces « raccourcis mentaux » internes au fil du temps à mesure qu’ils acquièrent de l’expérience.
En ce qui a trait aux passages à niveau passifs, les conducteurs anticipent généralement l’absence, plutôt que la présence, de trains, compte tenu du nombre limité de fois où ils en ont rencontré par le passé. Lorsque les conducteurs reçoivent l’information qu’ils anticipent à propos de leur environnement, leur réaction tend à être rapide et exempte d’erreurs. Toutefois, lorsque l’information reçue est contraire à leurs attentes, les conducteurs ont tendance à réagir lentement et de manière inadéquate. - Distraction - La distraction est le fait de détourner son attention d’activités essentielles à la sécurité pour la prêter à une tâche concurrenteNote de bas de page 23. La distraction peut être causée par des sources visuelles, auditives, cognitives ou physiques.
- Déficits chez le conducteur - Cette notion regroupe des facteurs tels que la fatigue, l’alcool, les problèmes médicaux comme le diabète ou l’épilepsie, ainsi que les médicaments sur ordonnance ou non.
- Perception des dangers - La perception des dangers est l’aptitude à percevoir et à cerner les dangers particuliers présents dans l’environnement de conduite. Elle consiste à balayer du regard l’environnement routier, à déterminer si d’autres véhicules ou objets sont présents et à prévoir le comportement des autres usagers de la route.
En moyenne, les jeunes conducteurs novices prennent beaucoup plus de temps que les conducteurs expérimentés à détecter les dangers et ils en cernent moinsNote de bas de page 24, surtout lorsque les dangers se trouvent à une certaine distance, car leur détection exige des stratégies de recherche visuelle plus ciblées. Une conclusion importante constamment tirée des études sur le balayage visuel chez les conducteurs est que les stratégies de recherche visuelle employées par les conducteurs expérimentés sont plus souples que celles des conducteurs inexpérimentés. Par exemple, la portée de la recherche visuelle horizontale et verticale augmente chez les conducteurs expérimentés en présence de dangers et de situations de conduite dangereuse, alors que c’est moins le cas chez les conducteurs non expérimentésNote de bas de page 25.
1.20 Recherche sur la sécurité des passages à niveau passifs
En 1996, plus de la moitié des accidents et 60 % des pertes de vie aux passages à niveau aux États-Unis sont survenus à des passages à niveau passifs. En 1998, le National Transportation Safety Board (NTSB) des É.-U. a publié une étude intitulée « Safety Study: Safety at Passive Grade Crossings »Note de bas de page 26. L’étude avait pour objet de cerner les causes courantes des accidents aux passages à niveau passifs et de déterminer des manières d’améliorer la sécurité aux passages à niveau. Voici les problèmes de sécurité relevés dans l’étude :
- capacité des systèmes d’avertissement à alerter les conducteurs relativement à l’emplacement d’un passage à niveau passif;
- conditions de la route et de la voie qui peuvent nuire à la détection des trains;
- facteurs liés au comportement qui peuvent compromettre la capacité d’un conducteur à détecter un train et à réagir en conséquence;
- pertinence de la formation du conducteur sur les dangers présents aux passages à niveau passifs;
- uniformité de l’approche à l’égard de la sécurité aux passages à niveau passifs;
- signalisation suffisante aux passages à niveau passifs.
Le chapitre 6 de l’étude, qui a pour titre « Measures To Improve Safety at Passive Grade Crossings », traite de sujets comme les sauts-de-mouton, la fermeture de passages à niveau et l’installation de dispositifs d’avertissement activés par les trains. Bien que les sauts-de-mouton ou la fermeture de passages à niveau puissent représenter l’amélioration optimale de la sécurité des passages à niveau passifs, l’étude souligne que si les sauts-de-mouton ou la fermeture de passages à niveau sont impossibles, la meilleure méthode subséquente consiste à les doter de dispositifs actifs avertissant les automobilistes de l’arrivée de trains.
Le rapport du NTSB concluait également que, bien que l’installation et la mise en application de panneaux d’arrêt aux passages à niveau passifs puissent fournir constamment aux automobilistes l’information nécessaire, leur donner les instructions voulues et les mettre au fait des règlements pertinents, les panneaux d’arrêt devaient seulement tenir lieu de mesures temporaires. La solution à long terme pour réduire ou éliminer les collisions entre les véhicules et les trains aux passages à niveau publics passifs consisterait à utiliser des systèmes de sécurité et d’avertissement à bord des véhicules ainsi que d’autres applications du secteur des systèmes de transports intelligents qui signalent la présence d’un train aux automobilistes par des avertissements actifs.
Le NTSB croyait également que des solutions temporaires provenant du secteur des systèmes de transports intelligents étaient possibles, par exemple des panneaux ou des signaux pouvant alerter les automobilistes de la présence d’un train sans qu’il soit nécessaire d’installer de coûteux circuits de voie. Des applications moins complexes du secteur des systèmes de transports intelligents ont été proposées pour les passages à niveau, notamment des panneaux à messages variables et des balises en bordure de route activées par des signaux de communications sans fil émis par le matériel de détection des trains. Bien que l’installation de panneaux d’arrêt puisse être efficace dans certains cas, le recours à des dispositifs d’avertissement actifs peu coûteux est la méthode la plus sûre pour faire progresser la sécurité aux passages à niveau publics passifs.
En 2010, la Federal Railroad Administration (FRA) des É.-U. a publié une évaluation technologique des dispositifs d’avertissement actifs peu coûteux (c.-à-d., les dispositifs qui avertissent les conducteurs de la présence d’un train en approche) en vue de leur mise en œuvre aux passages à niveau passifsNote de bas de page 27. La recherche a permis de cibler un certain nombre de technologies qui pourraient nettement réduire le coût des systèmes d’avertissement actifs. Par exemple, le ministère des Transports du Minnesota a effectué un essai opérationnel sur le terrain de panneaux indicateurs avancés activés par les trains. Les résultats ont démontré que le système de panneaux indicateurs actifs peu coûteux pouvait avertir de manière précise les conducteurs relativement à l’approche d’un train et ce, dans un délai adéquat. Une étude menée sur simulateur de conduite, portant sur les panneaux indicateurs avancés actifs peu coûteux, a révélé que de tels panneaux incitaient les conducteurs à ralentir à l’approche des passages à niveau passifs et réduisaient ainsi le nombre de collisionsNote de bas de page 28.
D’autres technologies prometteuses de détection des trains qui peuvent actionner les solutions de rechange fondées sur les panneaux indicateurs actifs peu coûteux reposent sur les systèmes de localisation GPS, le flux magnétique (p. ex., les capteurs de roues) et le radar. Comme ces technologies ne reposent pas sur des circuits de voie, elles peuvent être installées, entretenues ou remplacées sans que cela n’entraîne d’incidence sur l’exploitation ferroviaire ou des coûts importants. Bien que les panneaux indicateurs actifs montrent du potentiel, leur utilisation est peu répandue.
Au Canada, on a mis à l’essai les technologies suivantes en vue d’accroître la sécurité aux passages à niveau :
- En février 2010, Transports Canada a élaboré le document « Normes techniques pour systèmes d’avertissement utilisant des feux de signalisation piétonniers »Note de bas de page 29, ces systèmes étant destinés aux passages à niveau privés en territoire signalisé. Les feux de signalisation piétonniers sont situés de part et d’autre du passage à niveau, avec un panneau indicateur standard et un panneau d’arrêt; il s’agit d’une solution de rechange sous la forme d’un système d’avertissement de passage à niveau actif de rechange en mode de sécurité intrinsèque lorsqu’il est en position inutilisée. Les feux de signalisation présentent l’image d’un piéton illuminé lorsqu’aucun train n’approche; les feux s’éteignent lorsqu’un train approche (photo 5).

- En 2012, un radar a été installé sur une portion de l’autoroute 138 au sud d’Ottawa (Ontario), pour donner aux usagers de l’autoroute un signal avancé les avertissant de la présence possible d’animaux sur la route, dans un secteur où les collisions avec des animaux sauvages sont fréquentes. Depuis ce temps, le système a démontré qu’il pouvait repérer de manière fiable les animaux en mouvement ou immobiles présentant un danger pour les conducteurs dans toutes les conditions météorologiques; activer les feux d’avertissement avancés lorsqu’une menace est détectée et téléverser les données associées à un emplacement distantNote de bas de page 30. Le système est conçu pour alerter les conducteurs de la présence d’un grand animal à proximité de la route, mais il peut également indiquer à un conducteur qu’un train approche d’un passage à niveau passif. Depuis l’installation du système, aucune collision entre un véhicule et un grand animal n’est survenue sur cette portion de l’autoroute, alors qu’auparavant, on assistait à cet endroit à 3 collisions graves en moyenne par année. La réduction du nombre d’accidents est attribuable, du moins en partie, à la baisse significative de la vitesse des véhicules lorsque le système d’alerte est activé.
- Au cours des dernières années, le secteur automobile a mis en œuvre toutes sortes de technologies pour l’évitement des collisions, y compris la détection dans l’angle mort, l’espacement des véhicules, la régulation de la vitesse et le freinage d’urgence automatisé. Toutefois, aucune de ces applications commerciales ne comprenait de systèmes pour la détection des trains et l’évitement des collisions.
1.21 Données sur les événements connexes
En 2012, on dénombrait environ 16 229 passages à niveau rail-route au Canada, dont 10 628 (65,5 %) étaient passifs, c’est-à-dire non pourvus de dispositifs indiquant la présence (ou l’absence) d’un train qui approche.
Un examen des données du BST pour la période de 2003 à 2012 a révélé ce qui suit :
- Durant cette période, il y a eu au total 2165 accidents à des passages à niveau au Canada, ayant causé 267 décès et 346 blessés graves.
- 2031 des 2165 accidents (94 %) mettaient en cause des véhicules.
- 658 des 2031 accidents mettant en cause des véhicules (32 %) sont survenus à des passages à niveau publics passifs.
- Les 658 accidents survenus à des passages à niveau publics passifs ont causé 59 décès et 107 blessés graves.
- 1018 des 2031 accidents mettant en cause des véhicules (50 %) sont survenus à des passages à niveau publics dotés de dispositifs d’avertissement automatiques.
- Les 1018 accidents mettant en cause des véhicules qui sont survenus à des passages à niveau publics dotés de dispositifs d’avertissement automatiques ont causé 110 décès et 172 blessés graves.
En 2012, la subdivision de Broadview comptait 40 passages à niveau passifs en zone rurale, et la subdivision d’Indian Head en comptait 66 entre Regina et la frontière provinciale est. Depuis 2002, 18 événements sont survenus à des passages à niveau publics passifs sur cette portion de la voie.
1.22 Rapports de Laboratoire du BST
L’enquête a donné lieu au rapport de laboratoire suivant :
- LP200/2012 - Analysis of CP Locomotive Video Recording [Analyse de l’enregistrement vidéo de la locomotive du CP]
Ce rapport peut être obtenu du BST sur demande.
2.0 Analyse
Ni la conduite du train, ni l'état de la voie ou du matériel, ne sont considérés comme des facteurs contributifs de l'accident. L'analyse mettra l'accent sur les actions du conducteur et les mesures de protection en place, l'état et l'entretien des lignes de visibilité, l'audibilité du klaxon de train, le comportement et les perceptions du conducteur, la fatigue, les exigences relatives aux lignes de visibilité en vigueur et un aperçu de la réglementation.
2.1 L'accident
Le train approchait du passage à niveau en provenance de l'est, selon les procédures d'exploitation normales. Les phares avant, les phares de fossé et le klaxon étaient tous activés, conformément à la réglementation. Au moment où la fourgonnette approchait d'Airport Road, elle faisait face à la direction d'où provenait le train; elle roulait depuis près de 2 heures dans cette direction. Le train et la fourgonnette approchaient du passage à niveau en suivant des trajectoires presque parallèles, mais opposées. Le train se trouvait derrière un rideau d'arbres; il n'était donc pas possible de le voir depuis l'autoroute. Au moment où la fourgonnette a ralenti et tourné sur Airport Road, le train se trouvait encore à plus de 1000 pieds du passage à niveau, derrière le rideau d'arbres, qui se poursuivait jusqu'à un point situé à environ 575 pieds du passage à niveau. En conséquence, le train n'était pas visible pour les occupants de la fourgonnette au moment où celle-ci a ralenti, a tourné sur Airport Road et s'est engagée sur la rampe menant au passage à niveau.
Le conducteur a approché du passage à niveau à une vitesse d'environ 28 km/h sur Airport Road, puis a commencé à ralentir à environ 40 pieds du passage à niveau. Cela correspond à la zone de non-récupération, où la fourgonnette doit pouvoir s'arrêter une fois les freins appliqués. Comme la végétation présente à l'est empêchait les membres de l'équipe de train de voir la fourgonnette, et le conducteur de la fourgonnette de voir le train, aucun d'eux ne s'est aperçu qu'il était sur une trajectoire de collision jusqu'au moment où il était trop tard. En conséquence, le conducteur de la fourgonnette a continué de ralentir et est entré dans la zone de danger à une vitesse d'environ 18 km/h.
À environ 12 pieds du passage à niveau, la fourgonnette a accéléré. C'est probablement à ce moment que le conducteur s'est rendu compte que le train roulant vers l'ouest approchait. Comme la fourgonnette se trouvait déjà dans la zone de danger, le conducteur a tenté de franchir le passage à niveau en accélérant pour devancer le train. Comme ni l'accélération, ni le freinage ne sont efficaces dans la zone de danger, une collision était désormais inévitable. La collision est survenue lorsque la fourgonnette, dont les occupants n'étaient initialement pas conscients qu'un train approchait en provenance de l'est, s'est engagée dans la trajectoire du train et a été frappée par le travers.
2.2 Lignes de visibilité
Deux bosquets et des buissons se trouvaient du côté nord de l'emprise ferroviaire, à l'est du passage à niveau. En raison de la végétation présente à cet endroit, les conducteurs des véhicules roulant vers l'est sur l'autoroute 1 et des véhicules tournant vers le sud sur Airport Road étaient dans l'impossibilité de voir les trains qui approchaient de l'est. Les lignes de visibilité vers l'est étaient limitées à moins de 700 pieds. Les membres de l'équipe du train en cause, lequel se dirigeait vers l'ouest, ont d'abord pu apercevoir un reflet généré par le pare-brise de la fourgonnette, qui approchait du passage à niveau depuis le nord, à environ 575 pieds à l'est du passage à niveau, au moment où le train dépassait les arbres se trouvant le long de l'emprise.
Pour une vitesse routière estimative de 30 km/h et une vitesse ferroviaire maximale de 60 mi/h, la ligne directrice G4-A de Transports Canada (TC) prescrit le long de la voie une ligne de visibilité dégagée de 273 m à partir du passage à niveau, à une distance de 30 mètres (souhaitée) ou de 20 mètres (minimale) le long de la route, de chaque côté du passage à niveau. À la suite de l'accident, la mesure des lignes de visibilité a permis de déterminer que l'entretien de la végétation effectué à l'est du passage à niveau était inadéquat et que la ligne de visibilité dans cette direction ne se conformait pas à la ligne directrice G4-A. Le passage à niveau avait été inspecté peu de temps auparavant et il avait été établi qu'il devait faire l'objet d'opérations de débroussaillement; toutefois, ces opérations n'avaient pas encore eu lieu. En conséquence, la végétation présente le long de l'emprise obstruait les lignes de visibilité tant pour les membres de l'équipe de train, vers l'ouest, que pour le conducteur de la fourgonnette, vers l'est, roulant sur l'autoroute 1, lorsque le véhicule a tourné sur Airport Road et l'approche routière vers le passage à niveau.
Le conducteur avait regardé à gauche, soit vers l'est, pour voir si un train approchait de cette direction. Ne voyant aucun train, le conducteur s'est dirigé vers le passage à niveau. Aucun train en provenance de l'est n'avait été vu, et les trains observés au cours du trajet approchaient surtout depuis l'ouest (vers l'est) : le conducteur et le conducteur surveillant 1 ont donc regardé vers l'ouest et ont probablement commencé à se concentrer sur le repérage des trains se dirigeant vers l'est.
Pour repérer les trains roulant vers l'est, le conducteur devait regarder de l'autre côté de la cabine de la fourgonnette, c.-à-d., par la fenêtre du côté passager. Son regard croisait donc le conducteur surveillant 1, le miroir et le montant avant de la fourgonnette pour ensuite plonger dans le soleil couchant. En outre, la végétation bordant la voie et la route lui bloquait partiellement la vue. Le fait qu'il y ait eu accélération et décélération de la fourgonnette dans la zone d'approche indique une hésitation de la part du conducteur, qui voulait être certain qu'aucun train n'arrivait de l'ouest avant de prêter de nouveau son attention à l'avant et à la gauche. Comme le conducteur a prêté son attention à l'ouest, puis au sud, en direction du passage à niveau, le train en provenance de l'est s'est retrouvé dans son champ de vision périphérique, où l'absence de mouvement de l'image rétinienne rendait peu probable le repérage de ce train, jusqu'au moment où le conducteur a regardé vers la gauche et où le véhicule était déjà entré dans la zone de danger.
2.3 Audibilité du klaxon de train
Malgré leur efficacité avérée, les klaxons de train sont considérés comme des systèmes d'alerte secondaires. Les recherches ont démontré que l'emplacement du klaxon et la vitesse du train pouvaient compromettre l'audibilité de ce klaxon et son efficacité à titre de moyen d'atténuation des dangersNote de bas de page 31. D'autres facteurs influent également sur l'efficacité du klaxon de train, notamment l'étouffement du son causé par la carrosserie du véhicule routier et le bruit de fond présent à l'intérieur du véhicule. Les exigences réglementaires en vigueur spécifient que le klaxon de locomotive doit pouvoir produire un niveau sonore minimal de 96 dB(A) à une distance de 100 pieds.
Dans l'événement en cause, une fois que l'équipe de la locomotive s'est aperçue que la fourgonnette pouvait ne pas stopper, elle a donné un long coup continu de klaxon jusqu'à ce que le train occupe le passage à niveau. Comme les fenêtres de la fourgonnette étaient fermées, le son était réduit d'environ 30 dB(A). Le bruit de fond à l'intérieur de la fourgonnette était estimé à au moins 67 dB(A).
La locomotive en cause dans l'événementNote de bas de page 32 comportait un klaxon monté en son centre et pourvu de 3 cornets. Elle se déplaçait à une vitesse de 53 mi/h. Le niveau de pression acoustique global d'un klaxon de ce type, mesuré à l'avant d'un train en mouvement, est inférieur d'environ 18 dB(A), entre 13 et 14 degrés de la ligne centrale de la locomotive au niveau de la pression acoustique global du klaxonNote de bas de page 33 mesurée lorsque le train est immobile. Lorsque la différence d'élévation entre le train et la fourgonnette est prise en compte, le niveau de pression acoustique à l'emplacement de la fourgonnette est peut-être davantage réduit.
En conséquence, lorsque le train se trouvait à une distance de 100 pieds de la fourgonnette, le rapport signal-bruit du klaxon de train était seulement, selon les calculs, de -1 dB(A). Chaque fois que la distance entre le klaxon du train et la fourgonnette est réduite de moitié, le rapport signal-bruit augmente de 6 dB(A). Même si le train s'était trouvé à 12,5 pieds de la fourgonnette, le rapport signal-bruit du klaxon de train n'aurait été que de 17 dB(A). Ce qui signifie tout de même qu'il aurait été presque impossible d'entendre le klaxon à l'intérieur de la fourgonnette. La carrosserie, le fait que ses fenêtres étaient fermées, le bruit ambiant et les conversations de fond à l'intérieur de la fourgonnette ont réduit l'audibilité du klaxon de train et l'aptitude des passagers à l'entendre. Bien qu'un klaxon de locomotive puisse être une mesure de protection utile aux passages à niveau passifs, l'accident en cause démontre qu'à moins que le conducteur et les passagers pratiquent une écoute active en vue d'entendre le klaxon de train, l'activation de ce dernier ne représente pas toujours une manière efficace d'avertir les gens qu'un train approche, ce qui augmente le risque d'accident aux passages à niveau.
2.4 Expérience et fatigue du conducteur
Le conducteur était à 1 semaine de son 16e anniversaire et devait subir la portion routière de l'examen menant à l'obtention du permis de conduire peu de temps après son retour en Alberta. Le conducteur manœuvrait divers véhicules depuis au moins 2 ans et connaissait l'aspect mécanique de la conduite des véhicules. Toutefois, l'expérience antérieure du conducteur à l'égard du franchissement de passages à niveau non pourvus de dispositifs d'avertissement automatiques se limitait à l'utilisation occasionnelle du passage à niveau en cause dans l'accident lorsqu'il allait visiter des gens dans le secteur de Broadview. En conséquence, peu importe son âge, le conducteur ne possédait qu'une expérience limitée des risques relatifs au franchissement des passages à niveau passifs protégés uniquement par des panneaux indicateurs de passage à niveau standard.
Les jeunes conducteurs novices détectent moins rapidement les dangers et repèrent moins de dangers que les conducteurs expérimentés, surtout lorsque ces dangers se trouvent à une certaine distance. Les conducteurs expérimentés ont tendance à étendre la portée de leur balayage visuel horizontal et vertical dans des situations dangereuses, tandis que les conducteurs moins expérimentés ne font normalement pas montre de la même souplesse.
Les baisses de rendement du conducteur ainsi que les périodes d'éveil prolongées et les perturbations des rythmes circadiens ont été citées tant dans la littérature sur les travaux de recherche menés sur le sujet que dans des rapports antérieurs du BST. Dans de tels cas, la fatigue inhérente à l'une des conditions ou aux deux est réputée nuire tant au rendement du conducteur qu'à son fonctionnement cognitif. De tels déficits chez un conducteur peuvent avoir une incidence non seulement sur ses aptitudes mécaniques nécessaires pour bien maîtriser un véhicule, mais aussi sur son aptitude à évaluer les risques et à planifier ses actions.
Le matin de l'événement, le conducteur s'est réveillé plus tôt qu'à la normale. Le conducteur n'avait dormi que 5,25 heures durant la nuit précédant le voyage, ce qui représentait 3,25 heures de moins que le temps de sommeil moyen recommandé pour les adolescents, et 2,25 heures de moins que le temps de sommeil nocturne habituel du conducteur. Bien que le conducteur ait eu l'occasion de faire des siestes dans la fourgonnette pendant la première partie du voyage, soit entre la ville de départ et Chestermere, puis de nouveau durant le trajet entre Swift Current et Regina, le sommeil diurne est de plus mauvaise qualité et moins réparateur que le sommeil nocturne. La qualité du sommeil est dépréciée encore plus par les difficultés de trouver le sommeil dans une fourgonnette en mouvement où se trouvent 4 autres passagers. Ainsi, il est possible qu'au moment de l'accident, le conducteur ait ressenti un déficit de sommeil d'au moins 2,25 heures et qu'il se soit senti légèrement fatigué.
En outre, le conducteur surveillant 1 n'avait pas eu suffisamment de sommeil réparateur pour compenser les 22,75 heures de veille continue avant le début du voyage et était vraisemblablement fatigué au moment de l'accident.
Bien que les lignes de visibilité réduites à l'est du passage à niveau eussent présenté des difficultés même pour un conducteur expérimenté, le manque d'expérience du conducteur relativement aux risques associés au franchissement des passages à niveau passifs protégés uniquement par des panneaux indicateurs de passage à niveau standard, et la fatigue du conducteur surveillant, ont vraisemblablement contribué à l'accident.
2.5 Repérage et gestion des lacunes au chapitre des lignes de visibilité
Conformément au Règlement concernant la sécurité de la voie, les chemins de fer effectuent des inspections continues de leurs voies afin d'en assurer la sécurité en vue de l'exploitation ferroviaire. Toutefois, le contrôle des lignes de visibilité durant les inspections régulières de la voie représente une activité secondaire, et il ne permet pas toujours d'évaluer efficacement les éléments obstruant les lignes de visibilité depuis la route.
Outre les inspections de la voie, le CP a implanté un programme régional de gestion de la végétation qui vise à faire coïncider les opérations de débroussaillement et d'épandage d'herbicides avec les taux de croissance de la végétation observés par le passé. Le plan peut être rajusté en fonction des résultats des inspections effectuées par le personnel et des communications avec l'organisme de réglementation ou les autorités locales. Toutefois, en pratique, le CP ne requiert une inspection détaillée d'un passage à niveau qu'à la suite d'un accident à cet endroit. Aucun processus formel n'est en place pour garantir l'inspection au moins une fois par année de toutes les lignes de visibilité des passages à niveau passifs.
TC a effectué une inspection détaillée du passage à niveau en cause un an avant l'accident. Bien que les lignes de visibilité fussent limitées et qu'elles ne répondaient pas à la ligne directrice G4-A à ce moment, TC a déterminé qu'elles étaient adéquates et n'exigeaient pas de mesures particulières; TC n'a donc pas communiqué avec la compagnie de chemin de fer. Selon les dossiers, au moment où les équipes de débroussaillement sont arrivées à la subdivision de Broadview, les lignes de visibilité du passage à niveau en cause et d'au moins 12 autres passages à niveau présentant une priorité élevée étaient déjà obstruées. Dans tous ces cas, la compagnie de chemin de fer et l'organisme de réglementation menaient leurs activités de manière réactive. Si les activités d'entretien des lignes de visibilité des passages à niveau passifs sont réactives, les éléments obstruant les lignes de visibilité sont donc éliminés seulement après avoir nui à l'aptitude d'un conducteur à déterminer si, oui ou non, un train approche, ce qui accroît le risque d'accident.
2.6 Difficultés inhérentes aux facteurs humains lors du franchissement d'un passage à niveau passif
Lorsqu'un conducteur approche d'un passage à niveau, il doit accomplir un certain nombre de tâches physiques et cognitives pour reconnaître le passage à niveau, déterminer la présence d'un train, établir, le cas échéant, si le train est en mouvement et prendre les mesures de protection appropriées. Le conducteur doit réaliser ces tâches avant d'entrer dans la zone de non-récupération, qui correspond au point de non-retour. Ces tâches ont lieu dans un environnement où le conducteur peut avoir certaines attentes, être soumis à des sources de distraction et avoir à composer avec des éléments obstruant sa vue.
Certains facteurs, par exemple la position du soleil et la croissance de la végétation, peuvent varier selon la saison ou le moment de la journée. Lorsqu'un conducteur approche d'un passage à niveau, d'autres facteurs entrent toujours en scène, par exemple la présomption selon laquelle il n'y a probablement aucun train et l'idée selon laquelle, dans les Prairies, les trains qui approchent sont faciles à voir, et la vitesse des trains, facile à estimer. Ces facteurs doivent être contrebalancés par des efforts visant à garantir que les conducteurs évaluant le risque inhérent au passage à niveau peuvent voir les trains. Dans le présent cas, les actions du conducteur ont probablement été influencées par la distance d'approche limitée découlant de la proximité de l'autoroute par rapport au passage à niveau, l'impression qu'avait le conducteur de bien voir la voie depuis l'autoroute et les lignes de visibilité limitées du conducteur une fois que le véhicule eut tourné sur Airport Road.
Pour ajouter à la complexité du problème, le temps de perception-réaction du conducteur doit également être pris en compte. La prolongation de ce temps retarde d'autant le début du freinage. Plus la distance de freinage se déplace dans la zone de danger, plus grande est la probabilité d'une collision. La ligne directrice G4-A de TC est fondée sur un temps de perception-réaction du conducteur de 2,5 secondes. Ce temps repose sur l'hypothèse selon laquelle un klaxon de train est entendu ou que des indicateurs de collision actifs, par exemple les feux de freinage du véhicule suivi ou les dispositifs d'avertissement automatiques, se trouvent sous les yeux du conducteurNote de bas de page 34. Cependant, des hypothèses de ce type ne s'appliquent pas toujours lorsqu'on approche d'un passage à niveau passif protégé uniquement par des panneaux indicateurs standard, car un train n'occupe pas nécessairement le passage à niveau, il n'y a peut-être pas de véhicule devant, il n'existe peut-être pas de protection par dispositifs d'avertissement automatiques et le klaxon du train n'est pas toujours audible.
À un passage à niveau passif, à moins que le train ne se trouve déjà dans le champ de vision du conducteur, le temps de perception-réaction doit également comprendre le temps que prend le conducteur pour balayer du regard les zones se trouvant à gauche et à droite du véhicule afin de déterminer s'il y a un train. Comme le démontre l'accident en cause, lorsque le temps de balayage est inclus, il est plus réaliste d'estimer à 4,5 secondes le temps de perception-réaction pour ce passage à niveau passif protégé uniquement par des panneaux indicateurs de passage à niveau standard.
Compte tenu des 4 zones que les conducteurs traversent lorsqu'ils approchent d'un passage à niveau passif protégé uniquement par des panneaux indicateurs standard, lorsqu'on utilise un temps de perception-réaction de 4,5 secondes pour calculer la distance optimale de visibilité requise à ce passage à niveau (figure 4) et qu'on le compare aux lignes de visibilité minimales dont fait état la ligne directrice G4-A (figure 4, zone comportant des traits obliques), les lignes de visibilité peuvent être inadéquates pour une proportion importante d'approches véhicule-conducteur (c.-à-d. allant jusqu'à 83 %).
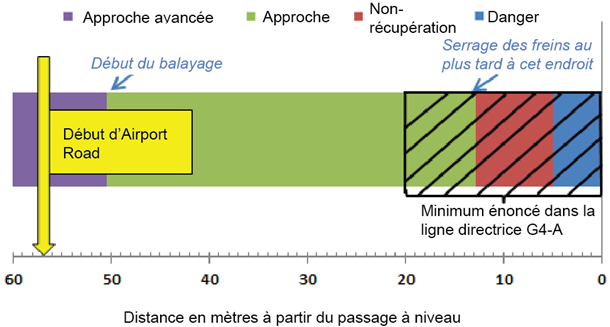
L'utilisation courante d'un temps de perception-réaction de 2,5 secondes aux fins de calcul des distances de visibilité minimales exigées par la ligne directrice G4-A pour les passages à niveau passifs dotés uniquement de panneaux indicateurs standard sous-estime la distance de visibilité d'arrêt nécessaire pour permettre aux conducteurs de repérer un train dans les 2 directions et de réagir de manière appropriée au besoin. En conséquence, si tous les facteurs affectant le comportement du conducteur sont pris intégralement en compte, les zones de visibilité dégagée indiquées dans la ligne directrice G4-A avec un temps de perception-réaction de 2,5 secondes ne sont pas toujours suffisantes pour accorder aux conducteurs le temps nécessaire à l'évaluation de tous les risques et à la prise des mesures appropriées, au besoin, à l'approche d'un passage à niveau passif protégé uniquement par des panneaux indicateurs standard, ce qui accroît le risque d'une collision entre des véhicules et des trains.
2.7 Défense en profondeur aux passages à niveau passifs protégés uniquement par des panneaux indicateurs standard
Au Canada, sur une période de 10 ans (de 2003 à 2012), 658 accidents mettant en cause des véhicules sont survenus à des passages à niveau publics passifs. Ces accidents ont entraîné 59 décès et 107 blessés graves. Les conséquences, sur les plans économique et social, des accidents aux passages à niveau sont importantes et peuvent être dévastatrices. Ainsi, ces accidents représentent l'une des principales préoccupations en matière de sécurité des autorités routières et ferroviaires du monde entierNote de bas de page 35,Note de bas de page 36,Note de bas de page 37.
La sécurité ferroviaire repose sur un concept de défense en profondeur. Pour les passages à niveau passifs, une telle défense comporte les éléments suivants :
- panneaux indicateurs standard installés au passage à niveau indiquant que les conducteurs doivent céder le passage à un train;
- lignes de visibilité adéquates pour que les conducteurs de véhicules disposent de suffisamment de temps pour réagir au besoin;
- activation du klaxon de train pour avertir les conducteurs de l'arrivée du train.
Comme les trains ont le droit de passage à tous les passages à niveau et qu'il est pratiquement impossible de ralentir un train qui risque la collision avec un véhicule à un passage à niveau, les mesures nécessaires pour empêcher un accident incombent principalement au conducteur du véhicule. Les chemins de fer sont tenus de s'assurer que les lignes de visibilité sont adéquates et que les klaxons de train sont fonctionnels. L'organisme de réglementation doit, pour sa part, établir des règlements et des normes en matière de sécurité aux passages à niveau et veiller à l'atténuation des menaces pour la sécurité repérées aux passages à niveau. L'autorité routière a également son rôle à jouer dans la sécurité aux passages à niveau.
Dans la plupart des cas, dans les Prairies, les passages à niveau passifs se trouvent surtout aux endroits où la fréquence de passage des trains ou des véhicules est basse. Ainsi, la probabilité qu'un conducteur de véhicule rencontre un train et, par conséquent, le risque perçu par le conducteur à l'égard de l'approche, sont réduits. Toutefois, en pratique, il peut y avoir un plus grand risque d'accident aux passages à niveau protégés uniquement par des panneaux indicateurs standard où la fréquence de passage des trains ou des véhicules est basse.
La présente enquête a permis d'établir que, lorsqu'un train ne devient visible pour un conducteur qu'au moment où son véhicule est déjà bien engagé dans la zone de non-récupération, le risque de collision est élevé. Dans les cas où on ne voit pas, depuis un véhicule, un train qui approche, le conducteur du véhicule s'attend généralement à ce que le klaxon de la locomotive l'avertisse de l'arrivée imminente du train. Toutefois, comme le démontre l'accident en cause, le klaxon de la locomotive n'est pas toujours audible pour les conducteurs. Cela laisse supposer qu'aux passages à niveau passifs en zone rurale, protégés uniquement par des panneaux indicateurs standard, le présent système de défense en profondeur ne fonctionne pas toujours comme prévu, ce qui accroît le risque d'accident à ces endroits.
2.8 Mise en œuvre de systèmes d'alerte de passages à niveau passifs peu coûteux
Au cours de la dernière décennie, de nombreux travaux de recherche ont démontré que l'amélioration de la formation des conducteurs sur les passages à niveau passifs pouvait leur être avantageuse. Toutefois, la plupart des conducteurs ne rencontrent pas de passages à niveau passifs assez fréquemment pour mettre en pratique et assimiler le comportement enseigné dans le cadre d'une telle formation. Dans les Prairies, où l'on a l'impression d'être capable de voir sur des distances de plusieurs milles et où les conducteurs croient qu'ils rencontreront rarement des trains en approchant d'un passage à niveau, un fort modèle mental se développe, soit la présomption de l'absence de trains. Pour compenser cette tendance à la présomption, les lignes de visibilité doivent être bien dégagées et le train en approche doit être visible, reconnu et considéré comme tel. À cette fin, des dispositifs d'avertissement actifs avancés peu coûteux ayant pour objet d'alerter les conducteurs de la présence d'un train pourraient être un meilleur dispositif de sécurité pour les passages à niveau sans dispositif de signalisation automatique.
Des études ont démontré que des signaux d'avertissement avancés actifs peu coûteux étaient efficaces pour réduire les vitesses d'approche et le nombre de collisions aux passages à niveau passifsNote de bas de page 38. Ces études portent à penser que, pour améliorer la sécurité aux passages à niveau passifs, la solution consiste à les doter de tels dispositifs afin d'attirer l'attention des conducteurs et de les avertir à l'avance d'un train en approche, surtout aux endroits où les lignes de visibilité ne sont pas optimales. Plusieurs systèmes prometteurs ont été mis à l'essai :
- Au Canada, des systèmes d'avertissement de passages à niveau utilisant des feux de signalisation piétonniers ont été installés à certains passages à niveau privés en territoire signalisé. De tels systèmes pourraient également être utilisés à des passages à niveau publics passifs en zone rurale.
- Les technologies de détection des trains fondées sur la technologie GPS, le flux magnétique (p. ex., capteurs de roues) et les radars semblent approcher de la viabilité commerciale; d'autres technologies embarquées dans des dispositifs déjà employés dans le secteur automobile ou dans les installations ferroviaires fixes pourront vraisemblablement être adaptées pour protéger les passages à niveau passifs.
Les mesures de sécurité mises en œuvre aux passages à niveau passifs ne fonctionnent pas toujours comme prévu. Sans un système d'alerte peu coûteux, le risque d'accident aux passages à niveau passifs se maintiendra.
2.9 Documents d'orientation pour le programme de permis de conduire progressif
Dans l'événement en cause, la manière dont les 3 conducteurs avaient planifié le voyage, notamment les pauses et les changements de conducteur, était conforme à l'orientation générale énoncée dans le programme de permis de conduire progressif de l'Alberta. Durant le déplacement, le conducteur a manœuvré le véhicule conformément aux modalités relatives à l'étape 1 du programme de permis de conduire progressif de l'Alberta; une personne titulaire du permis adéquat (conducteur surveillant 1) prenait place dans le siège du passager avant. Le titulaire d'un permis de conduire émis conformément à l'étape 1 du système de permis de conduire progressif de l'Alberta est autorisé à transporter des passagers supplémentaires et à conduire en Saskatchewan, en vertu des mêmes modalités.
Le programme de permis de conduire progressif de l'Alberta, à l'instar des autres programmes de permis de conduire progressif provinciaux et territoriaux, ne donne que des conseils généraux sur l'approche des passages à niveau sans dispositif d'avertissement automatique, et met plutôt l'accent sur l'importance de céder le passage aux trains. Ces conseils n'indiquent pas que la plupart des gens sous-estiment la vitesse des trains et que les klaxons de train peuvent être inaudibles à l'intérieur d'une voiture en mouvement dont les fenêtres sont fermées.
Bien que le programme de permis de conduire progressif recommande que tous les conducteurs soient bien reposés avant d'entreprendre leur périple, il ne souligne pas le fait que les adolescents ont généralement besoin de plus de sommeil que les adultes, et que les adultes ont besoin d'au moins 8 heures de sommeil par nuit, pour que ce sommeil soit réparateur. Le programme de permis de conduire progressif de l'Alberta ne donne pas assez d'information sur les risques inhérents aux passages à niveau pourvus de systèmes d'avertissement passifs, la sous-estimation des vitesses des trains, l'audibilité des klaxons de train et les baisses de rendement causées par des périodes de veille prolongées.
2.10 Enregistreurs de données du véhicule
La plupart des enregistreurs de données des automobiles ne sont pas spécialement conçus pour les enquêtes sur les accidents et ne se sont pas révélés être des sources de données fiables à cette fin. Ces appareils n'enregistrent pas continuellement l'information; au lieu de cela, les données enregistrées dans la fourgonnette sont seulement transférées à la mémoire rémanente lorsque le module de commande du groupe motopropulseur reçoit un signal des prétendeurs des ceintures de sécurité ou lors du déploiement des coussins gonflables. Le module de commande du groupe motopropulseur doit être alimenté pendant au moins quelques dixièmes de seconde après une collision pour conserver les données.
Dans l'accident en cause, bien que les prétendeurs des ceintures de sécurité se soient actionnés et que les coussins gonflables se soient déployés, le module de commande du groupe motopropulseur n'a pas reçu de signal et les données sur l'accident n'ont pas été sauvegardées. Le câble de communication du réseau de commande du véhicule a probablement été abîmé durant l'impact initial avec le train, c.-à-d. avant le signal de déploiement des coussins gonflables, ce qui a empêché la transmission des données du module de commande des dispositifs de retenue au module de commande du groupe motopropulseur. En conséquence, les enregistreurs de la fourgonnette ne contenaient aucune donnée récupérable et il n'a pas été possible d'obtenir d'informations vitales qui auraient pu contribuer à l'enquête.
2.11 Caméra vidéo orientée vers l'avant de la locomotive
Les caméras vidéo orientées vers l'avant adoptées par l'industrie ferroviaire se sont révélées très utiles. Pour la présente enquête, une analyse image par image de la vidéo enregistrée par la caméra orientée vers l'avant de la locomotive a fourni de l'information fiable, indépendante et objective qui a permis de reconstituer le fil des événements. La vidéo a procuré suffisamment de données pour documenter les conditions liées aux lignes de visibilité à l'approche du passage à niveau de même que pour établir la vitesse et l'accélération de la fourgonnette ainsi que sa position par rapport au train dans les moments précédant l'accident. La présence d'une caméra vidéo orientée vers l'avant installée sur la locomotive de tête et l'obtention d'un enregistrement fiable ont réellement contribué à la compréhension des circonstances ayant mené à l'accident en cause.
2.12 Aperçu de la réglementation
Transports Canada (TC) mène actuellement des consultations sur le Règlement sur les passages à niveau proposé, conformément à la Loi sur la sécurité ferroviaire. Ce règlement est au stade de l'ébauche depuis près de 25 ans. Durant toutes ces années, il y a eu dialogue continu avec l'industrie et les autorités provinciales et municipales concernées. Entretemps, l'industrie utilise largement les normes préliminaires du projet RTD 10, qui énonce les meilleures procédures d'exploitation et pratiques d'ingénierie pour la sécurité aux passages à niveau, en guise de directives. Toutefois, jusqu'à ce que l'entretien des lignes de visibilité soit une activité régulière, les passages à niveau non sécuritaires continueront de présenter un risque pour les employés des chemins de fer et les voyageurs.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
- La collision est survenue lorsque la fourgonnette, dont les occupants n’étaient initialement pas conscients de l’approche d’un train en provenance de l’est, s’est engagée dans la trajectoire du train, qui l’a frappée par le travers.
- L’entretien de la végétation à l’est du passage à niveau n’était pas suffisant pour garantir que la ligne de visibilité disponible dans cette direction était conforme à la ligne directrice G4-A de Transports Canada.
- La végétation présente le long de l’emprise obstruait les lignes de visibilité tant pour les membres de l’équipe de train, vers l’ouest, que pour le conducteur, vers l’est, roulant sur l’autoroute 1, au moment où la fourgonnette tournait sur Airport Road et suivait l’approche routière menant au passage à niveau.
- Au cours du trajet, on a surtout observé des mouvements de train en provenance de l’ouest (vers l’est); ainsi, le conducteur et le conducteur surveillant titulaire d’un permis doté de tous les privilèges ont regardé vers l’ouest et ont probablement commencé à se concentrer sur le repérage des trains se dirigeant vers l’est.
- Comme le conducteur a porté son attention vers l’ouest, puis vers le sud, en direction du passage à niveau, le train en provenance de l’est s’est retrouvé dans son champ de vision périphérique, où l’absence de mouvement de l’image rétinienne rendait peu probable le repérage du train, jusqu’au moment où le conducteur a regardé vers la gauche, après être entré dans la zone de danger.
- La carrosserie de la fourgonnette, le fait que ses fenêtres étaient fermées, le bruit ambiant et les conversations de fond à l’intérieur de la fourgonnette ont réduit l’audibilité du klaxon de train et l’aptitude des occupants de la fourgonnette à l’entendre.
- Le manque d’expérience du conducteur relativement aux risques inhérents au franchissement des passages à niveau passifs protégés uniquement par des panneaux indicateurs standard et l’état de fatigue du conducteur surveillant ont vraisemblablement contribué à l’accident.
3.2 Faits établis quant aux risques
- L’activation du klaxon de train ne constitue pas toujours une manière efficace d’avertir les gens d’un train en approche, ce qui augmente le risque d’accident au passage à niveau.
- Si les activités d’entretien des lignes de visibilité sont réactives, il est possible que les éléments obstruant les lignes de visibilité soient éliminés seulement après avoir compromis l’aptitude d’un conducteur à déterminer si, oui ou non, un train approche, ce qui accroît le risque d’accident.
- Si tous les facteurs influant sur le comportement du conducteur sont pris intégralement en compte, les zones de visibilité dégagée établies dans la ligne directrice G4-A avec un temps de perception et de réaction de 2,5 secondes ne suffisent pas toujours à accorder aux conducteurs de véhicules le temps pour évaluer tous les risques et y réagir de manière appropriée, au besoin, lorsqu’ils approchent d’un passage à niveau passif protégé uniquement par des panneaux indicateurs standard, ce qui accroît le risque de collision entre des véhicules et des trains.
- Les mesures de sécurité mises en œuvre aux passages à niveau passifs ne fonctionnent pas toujours comme prévu. Sans systèmes d’alerte peu coûteux, le risque d’accident aux passages à niveau passifs se maintiendra.
- Si les lignes de visibilité ne sont pas entretenues en tout temps, les passages à niveau non sécuritaires continueront de présenter un risque pour les employés des chemins de fer et les voyageurs.
3.3 Autres faits établis
- Le programme de permis de conduire progressif de l’Alberta ne donne pas assez de renseignements sur les risques inhérents aux passages à niveau pourvus de systèmes d’avertissement passifs, la sous-estimation des vitesses des trains, l’audibilité des klaxons de train et les baisses de rendement causées par des périodes de veille prolongées.
- Les enregistreurs de la fourgonnette ne contenaient aucune donnée récupérable; il n’a donc pas été possible d’obtenir d’informations vitales qui auraient pu contribuer à l’enquête.
- La présence d’une caméra vidéo orientée vers l’avant installée sur la locomotive de tête et l’obtention d’un enregistrement fiable ont réellement contribué à la compréhension des circonstances ayant mené à l’accident en cause.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
4.1.1 Lettre d’information sur la sécurité ferroviaire du BST
Le 26 octobre 2012, le BST a émis la lettre d’information sur la sécurité ferroviaire 13/12 à l’intention de Transports Canada (TC). Selon cette lettre, environ 1 an avant l’accident, TC avait procédé à une inspection du passage à niveau au cours de laquelle on avait relevé une ligne de visibilité de 150 m (500 pieds) dans le quadrant nord-est, à une distance de 30 mètres au nord du passage à niveau. Cette information n’avait été communiquée ni au chemin de fer, ni à l’autorité ferroviaire.
L’examen mené par le BST à la suite de l’accident a révélé la présence de taillis et de buissons du côté nord de l’emprise ferroviaire, à l’est du passage à niveau. En raison de la végétation présente à cet endroit, les conducteurs des véhicules roulant vers l’est sur l’autoroute 1 et tournant vers le sud sur Airport Road étaient dans l’impossibilité de voir les trains en approche se déplaçant vers l’ouest et leur ligne de visibilité vers l’est a été limitée à moins de 700 pieds. Pour les conditions présentes à cet endroit, la ligne directrice G4-A relative aux lignes de visibilité minimales aux passages à niveau passifs indique la nécessité de dégager la vue de la voie sur une distance de 273 m (900 pieds) dans les deux directions. Selon la lettre d’information sur la sécurité ferroviaire, comme la gestion de la végétation près des passages à niveau passifs protégés uniquement par des panneaux indicateurs standard est essentielle à la sécurité de la circulation ferroviaire et routière, les programmes d’inspection et d’entretien doivent être suffisamment étoffés pour garantir le contrôle et l’entretien proactifs des lignes de visibilité des passages à niveau.
Le 4 décembre 2012, TC a répondu en suggérant que la distance « minimale » de 20 mètres devait s’appliquer et que la vitesse routière devait être estimée à 20 km/h. TC a également déclaré que l’obstruction des lignes de visibilité découlait peut-être de la croissance de la végétation depuis sa dernière inspection et a conclu qu’au moment de l’inspection, les lignes de visibilité « souhaitables » n’étaient présentes que dans une certaine mesure pour un véhicule se déplaçant à une vitesse de 30 km/h et correspondaient à plus du double de la distance « minimale » requise pour une vitesse estimée de 20 km/h, en raison de la proximité d’une intersection. En conséquence, au moment de l’inspection, TC a conclu qu’un conducteur aurait amplement l’occasion de voir un train approcher du passage à niveau à sa vitesse admissible maximale et que, par conséquent, on n’avait pas besoin de contacter les autorités responsables.
4.1.2 Travaux de recherche de Transports Canada concernant les systèmes d’avertissement de passages à niveau hybrides
TC a indiqué que le Règlement sur les passages à niveau devait entrer en vigueur à l’automne 2014 et contenir une disposition fondée sur des objectifs exigeant l’entretien en tout temps des lignes de visibilité. Lorsqu’il entrera en vigueur, le règlement clarifiera les responsabilités en matière d’inspection des lignes de visibilité et des mesures correctives.
La Direction générale de la sécurité ferroviaire de TC travaille avec le Centre de développement des transports (CDT) à la mise en œuvre d’un projet de recherche visant l’élaboration de systèmes d’avertissement hybrides pour les passages à niveau rail-route au Canada. L’objectif principal de ce projet est d’élaborer un système d’avertissement de passage à niveau intermédiaire se situant entre les systèmes d’avertissement passifs conventionnels (c.-à-d. seulement passifs) et les systèmes d’avertissement actifs complets (c.-à-d. signaux, feux clignotants, tintement, barrières). Le projet comportera 2 grandes phases :
- La première phase du projet comprend un examen de la littérature internationale, ainsi que la sélection et l’évaluation des systèmes d’avertissement de sécurité hybrides pour les passages à niveau. Dans le cadre de l’examen, on évaluera les systèmes d’avertissement hybrides des passages à niveau actuellement déployés, dont le déploiement est planifié et dont le déploiement est envisagé en Australie, aux États-Unis, en Grande-Bretagne et en Europe continentale, entre autres. Les systèmes d’avertissement et d’alerte hybrides pour les intersections route-route seront également évalués. Le rapport sur l’examen de la littérature devrait en principe être finalisé en octobre 2014.
- La deuxième phase du projet comprendra les éléments majeurs suivants :
- Des critères d’évaluation des risques et des options possibles seront élaborés pour permettre d’identifier les systèmes d’avertissement et d’alerte hybrides les plus efficaces pour atténuer les risques aux passages à niveau. Cela comprend l’analyse coûts-avantages et l’analyse coûts-efficacité permettant de comparer les différents systèmes d’avertissement et d’alerte hybrides et de sélectionner les meilleurs systèmes.
- On procédera à un examen de toutes les normes et lignes directrices pertinentes (aux niveaux fédéral et provincial) relatives (sans s’y limiter) à la performance, à la conception et à la mise en application des systèmes d’avertissement et d’alerte de sécurité à tous les passages à niveau au Canada.
- On recommandera des systèmes d’avertissement de sécurité hybrides pouvant être déployés à certains passages à niveau au Canada. Les conclusions et les recommandations découlant du rapport sur les systèmes d’avertissement de sécurité hybrides devraient en principe être finalisées en mars 2015.
4.2 Mesures de sécurité à prendre
4.2.1 Préoccupation en matière de sécurité - Protection des passages à niveau passifs
La sécurité ferroviaire repose sur le concept de défense en profondeur. Pour les passages à niveau passifs, une telle défense comporte les éléments suivants :
- panneaux indicateurs standard installés au passage à niveau indiquant que les conducteurs de véhicules doivent céder le passage à un train;
- lignes de visibilité bien dégagées pour que les conducteurs de véhicules disposent de suffisamment de temps pour réagir au besoin;
- activation du klaxon de train pour avertir les conducteurs de l’arrivée du train.
Au Canada, sur une période de 10 ans (de 2003 à 2012), 658 accidents mettant en cause des véhicules sont survenus à des passages à niveau publics passifs. Ces accidents ont entraîné 59 décès et 107 blessés graves.
Comme le démontre l’accident en cause, les mesures de sécurité mises en œuvre aux passages à niveau passifs ne fonctionnent pas toujours comme prévu. Le klaxon de train n’a pas donné un avertissement efficace et le conducteur n’a pas été en mesure de voir le train qui arrivait en raison de l’obstruction des lignes de visibilité. En conséquence, la fourgonnette n’a pas cédé le passage au train qui l’a frappée.
La ligne directrice G4-A est devenue la norme de facto pour les organismes de réglementation, les chemins de fer et les autorités routières afin d’évaluer et d’entretenir des lignes de visibilité adéquates à l’intention des conducteurs aux passages à niveau passifs. La ligne directrice utilise un temps de perception-réaction du conducteur de 2,5 secondes pour estimer la distance requise, à partir du passage à niveau, afin que le conducteur soit en mesure de balayer les environs du regard, repérer un train en approche et lui céder le passage. Cependant, Long et Nitsch (2008) ont démontré qu’un temps de perception-réaction de 2,5 secondes ne tenait pas compte du temps nécessaire au conducteur pour repérer un train en approche lorsqu’il ne se trouve pas dans son champ de vision immédiat. Pour ce faire, il faut parfois un temps de perception-réaction plus long.
Transports Canada (TC) convient qu’un temps de perception-réaction de 2,5 secondes ne tient pas compte de toutes les circonstances, mais il prétend qu’un tel temps reflète généralement le temps de réponse requis par 9 conducteurs sur 10 à une intersection. Bien que ce temps puisse convenir aux intersections routières où un feu de circulation ou un autre stimulus se trouve directement dans le champ de vision du conducteur, il ne convient pas aux passages à niveau passifs, qui requièrent un balayage supplémentaire de la part du conducteur. Comme le démontre l’accident en cause, lorsque le temps de balayage est inclus, il est plus réaliste d’estimer à 4,5 secondes le temps de perception-réaction pour ces passages à niveau passifs. Dans de telles situations, une protection de passage à niveau supplémentaire est requise pour compenser le manque au chapitre du temps de perception-réaction.
En guise de protection supplémentaire de passage à niveau parfois utilisée, notons le panneau d’arrêt installé sur le panneau indicateur standard ou avant ce dernier. Des panneaux d’arrêt ont été installés au passage à niveau, et à un certain nombre d’autres passages à niveau passifs dans le voisinage, à la suite de l’accident. Bien que les panneaux d’arrêt puissent atténuer certains risques liés aux lignes de visibilité, ils peuvent également créer d’autres risques. Par exemple, sur les lieux de l’accident, l’approche nord est une voie de gravier présentant une pente ascendante de 5,1 %; la vitesse autorisée maximale sur la voie ferrée est de 60 mi/h (100 km/h) et la voie ferrée se trouve très proche de l’autoroute. Cette situation peut présenter le risque que des véhicules à l’arrêt finissent par bloquer l’autoroute, ou que de gros camions lourds aient de la difficulté à franchir le passage à niveau après une immobilisation complète.
En outre, selon les résultats des recherches menées actuellement, les panneaux d’arrêt ne représentent pas la solution la plus efficace; afin qu’ils procurent les résultats escomptés de manière continue, il faut rappeler aux automobilistes la nécessité de les observer et, en plus, ils ne permettent pas de résoudre le problème de la présomption de l’usager de la route, selon laquelle il n’y aura pas de train.
Les recherches montrent la nécessité d’élaborer des systèmes d’alerte actifs peu coûteux (p. ex., des systèmes fondés sur les technologies GPS, du flux magnétique et des radars) qui sont déjà utilisés dans des applications connexes et qui ont démontré qu’ils pouvaient réduire la vitesse et le nombre de collisions aux passages à niveau passifs. De tels systèmes peuvent être autonomes ou tirer parti de systèmes intelligents déjà installés dans les véhicules, les locomotives ou les systèmes modernes de signalisation en voie pour indiquer à l’avance aux conducteurs la présence d’un passage à niveau passif et d’un train.
Il est louable que TC ait amorcé des travaux relatifs à l’élaboration de systèmes d’avertissement hybrides pour les passages à niveau rail-route; toutefois, ces travaux en sont encore à leurs premiers stades. Une fois les travaux de recherche finalisés, si TC exige la mise à niveau des systèmes d’avertissement, les modifications à la réglementation nécessaires seraient apportées plusieurs années plus tard.
Compte tenu des conséquences graves pouvant découler d’un accident à un passage à niveau et des progrès technologiques accomplis, le Bureau craint que le risque d’accident aux passages à niveau passifs se maintienne si on ne met pas rapidement en œuvre des systèmes d’alerte peu coûteux.
Le présent rapport met un terme à l’enquête du Bureau de la sécurité des transports du Canada (BST) sur cet événement. Le Bureau a autorisé la publication du rapport le . Il est paru officiellement le 26 mars 2014.
5.0 Annexes
Annexe A - Ligne directrice G4-A de Transports Canada
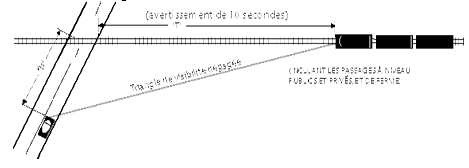
| Vitesse maximale du vehicle (km/h) | Distance* <<H>> | |
|---|---|---|
| Souhaitable (m) | Minimale (m) | |
| Arrêt | 8 | -- |
| 20 | 20 | 15 |
| 30 | 30 | 20 |
| 40 | 45 | 35 |
| 50 | 65 | 50 |
| 60 | 85 | 70 |
| 70 | 110 | 90 |
| 80 | 140 | 120 |
| 90 | 170 | 145 |
| 100 | 200 | 175 |
| Vitesse maximale du train (m/h) | Distance <<T>> | |
|---|---|---|
| pi | (m) | |
| Stop | 100 | (30) |
| 20 | 300 | (91) |
| 30 | 450 | (136) |
| 40 | 600 | (182) |
| 50 | 750 | (227) |
| 60 | 900 | (273) |
| 70 | 1050 | (318) |
| 80 | 1200 | (364) |
| 90 | 1350 | (409) |
| 100 | 1500 | (455) |
* Augmenter tel que requis aux paragraphes 3 et 4.
Pour établir la zone de visibilité dégagée
- Utiliser les vitesses maximales permises pour les trains et les vehicules.
- Suivre une ligne de vue joignant un point situé à 1,1 m au-dessus de la route et la voie ferrée.
- Si la pente à moins de 8 m du rail excède 5% ou si de lourds ou longs véhicules passent régulièrement, la distance de visibilité complète d'un véhicule arrêté doit aussi être augmentée à au moins 1,5 <<T>>, et plus si nécessaire pour donner aux véhicules arrêtés suffisamment de temps pour repartir et traverser en toute sécurité.
- Pour de longues approches descendantes où il y a circulent des véhicules lourds, augmenter <<H>> aux distances de visibilité d'arrêt.
- Si une visibilité complète ne peut être assurée pour les vitesses existantes, réduire la vitesse des véhicules ou des trains jusqu'à ce qu'un système de protection automatique soit installé.
Source : Exigences minimales relatives aux lignes de visibilité à tous les passages à niveau non munis de dispositifs d'avertissement automatique G4-A, https://www.tc.gc.ca/fra/securiteferroviaire/lignesdirectrices-280.htm (dernière consultation le 25 mars 2014).