Heurt
Vraquier Petersfield
Chenal Douglas (Colombie-Britannique)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Le 25 septembre 2009 à 22 h 46, heure avancée du Pacifique, le Petersfield, un vraquier à pont ouvert, est affecté par un signal de cap gyromagnétique défectueux et heurte la rive ouest du chenal Douglas (Colombie-Britannique). L'étrave à bulbe, le coqueron avant et la cloison d'abordage du navire subissent des avaries considérables. Personne n'est blessé, et l'événement ne cause aucune pollution. Le navire rentre à Kitimat (Colombie-Britannique) par ses propres moyens.
Renseignements de base
Fiche technique du navire
| Nom du navire | Petersfield |
|---|---|
| Numéro OMI | 8309713 |
| Port d'immatriculation | Nassau |
| Pavillon | Bahamas |
| Type | vraquier à pont ouvert |
| Jauge brute | 27 818 |
| LongueurNote de bas de page 1 | 187,5 m |
| Tirant d'eau | avant : 6,75 m arrière : 7,60 m |
| Construction | 1985 |
| Propulsion | moteur diesel B&W, 5973 kW, entraînant une hélice à pas fixe |
| Cargaison | carton doublure et emballages de papier kraft en rouleaux (15 404 tonnes) |
| Équipage | 26 personnes |
| Propriétaire enregistré | Gearbulk Shipowning, Ltd. |
| Gestionnaire | Kristian Gerhard Jebsen Skipsrederei, A.S. |
Renseignements sur le navire
Le Petersfield est un vraquier à pont ouvert dont la passerelle, les emménagements et la salle des machines sont situés sur l'arrière des 7 cales. Le navire est équipé de 2 grues à portique. Une étrave à bulbe entoure le ballast du coqueron avant. Une cloison d'abordage sépare le coqueron avant des soutes à combustible bâbord et tribord, situés immédiatement derrière.


Du côté bâbord de la passerelle, on trouve côte à côte 2 radars à aide de pointage automatique — un radar de 3 cm et un radar de 10 cm — et un système de cartes électroniques (ECS) (voir la figure 1).
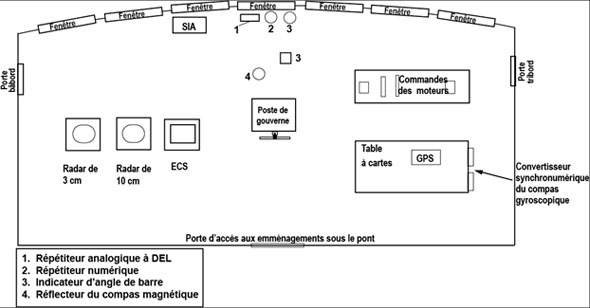
Les autres équipements de navigation comprennent 2 gyro-compas Note de bas de page 2, 3 récepteurs de système de positionnement global (GPS), un système d'identification automatique (AIS), un enregistreur de cap, un enregistreur simplifié des données de voyage (S-VDR) et un sondeur. Au total, on compte 5 répétiteurs de gyro-compas : un répétiteur numérique placé à l'avant, à peu près sur l'axe, un répétiteur analogique à DEL monté au-dessus de la fenêtre sur l'axe, un répétiteur analogique sur chacun des ailerons de passerelle bâbord et tribord, et un répétiteur analogique installé au poste de barre. Le réflecteur du compas magnétique et l'indicateur d'angle de barre (l'un étant monté au plafond et l'autre au-dessus de la fenêtre centrale) sont aussi visibles à partir du poste de barre.
Déroulement du voyage
Le 2 septembre 2009, le Petersfield appareille de Zhenjiang, en Chine, à destination de Kitimat (Colombie-Britannique). Dans le rapport de 96 heures avant l'arrivée qu'il transmet au centre des Services de communication et de trafic maritimes (SCTM) de Prince Rupert, le capitaine signale que le radar de 3 cm et l'ECS indiquent des caps gyromagnétiques instables et que le système de communication Sat Com B et le télécopieur du navire sont tous deux défectueux. Durant le voyage, on réinitialise la ligne de foi chaque fois que ces appareils se dérèglent.
Le bâtiment arrive à Kitimat le 19 septembre et, le 23 septembre, un technicien de service monte à bord pour diagnostiquer le problème qui a été signalé. On décide de brancher le signal de cap vers l'ECS et le radar de 3 cm directement dans le compas numérique; par la suite, on fait l'essai du système et on constate qu'il est en bon état de fonctionnement.
Le 25 septembre à 20 h 06Note de bas de page 3, 2 pilotes montent à bord du navire. À ce moment, on procède à l'échange entre le capitaine et le pilote. Un des pilotes place son ordinateur portable personnel, muni de logiciels de navigation, près de la porte bâbord de la passerelle et relie son ordinateur au AIS du navire. Vers 20 h 30, le navire, sous la conduite d'un piloteNote de bas de page 4, appareille de Kitimat pour le voyage de 36 heures qui doit le mener à Crofton (C.-B.). Sur la passerelle, le pilote est en compagnie du capitaine, du timonierNote de bas de page 5 et du troisième officier, qui remplit les fonctions d'officier de quart (OQ).
Le personnel navigant du navire établit le plan de voyage et enregistre les routes associées dans l'ECS. On ne discute pas du plan de voyage au moment de l'échange entre le capitaine et le pilote, bien que le pilote de service ait vu le plan sur la table à cartes et ait reconnu qu'il y a des similitudes entre le parcours prévu dans le plan et celui qu'il entend suivre.
Pendant la première portion du voyage, le navire doit naviguer dans le chenal Douglas et doubler Grant Point, puis Gertrude Point (voir l'annexe A). Après l'appareillage, le capitaine est présent sur la passerelle par intermittence et quitte la passerelle pour s'occuper de tâches administratives. Le pilote se sert du radar de 3 cm pour suivre la progression du navire, tandis que l'OQ utilise le radar de 10 cmNote de bas de page 6. Le timonier est à la barre et gouverne le navire en se servant du répétiteur à DEL et du répétiteur du poste de barre.
À 20 h 48 min 48 sNote de bas de page 7, le radar de 10 cm perd l'entrée de cap transmis par le gyro-compas, et l'OQ réaligne le radarNote de bas de page 8, rétablissant son fonctionnement normal. Un événement similaire se produit de nouveau à 20 h 54 min 18 s, puis à 20 h 58 min 33 s. Chaque fois, on réaligne la ligne de foi.

Par la suite, à partir de 21 h environ, il se produit 2 événements en succession rapide lors desquels le radar de 10 cm perd encore son entrée de cap; l'OQ réaligne le cap à ces 2 occasions. On informe alors le pilote que le radar de 10 cm connaît des ratés liés au cap gyromagnétique, sans l'aviser des difficultés précédentes.
À 21 h 29, le centre des SCTM de Prince Rupert fait savoir au navire que Transports Canada (TC) demande qu'un deuxième officier soit présent sur la passerelle, en raison des pannes de l'équipement, notamment du radar de 3 cm et de l'ECS défectueux qui ont été signalés pendant le voyage d'arrivée. Pendant les communications qui suivent, le pilote avise le centre des SCTM de Prince Rupert qu'un des radars est encore affecté par des problèmes liés au cap gyromagnétique. On fait venir le capitaine sur la passerelle et on l'informe des exigences de TC. Il confirme ensuite avec l'OQ que le radar de 3 cm et l'ECS fonctionnent normalement. Cette information est relayée par l'entremise du centre des SCTM et, par la suite, TC retire sa demande concernant la présence d'un deuxième officier sur la passerelle.
À 21 h 56 min 49 s, et de nouveau à 22 h 08 min 18 s, le radar de 10 cm perd l'entrée de cap transmise par le gyro-compas. Dans les deux cas, l'OQ réaligne la ligne de foi.
À 22 h 16, le capitaine, qui était sous le pont, revient sur la passerelle. Peu de temps après, à 22 h 28, tandis que le navire est au nord de Grant Point et est en route libreNote de bas de page 9, le pilote ordonne de changer de cap de 242° Gyro (G) à 218° G, et il vérifie le nouveau cap en faisant un contrôle visuel du répétiteur.
À 22 h 40 min 34 s, tandis que le navire maintient le cap, l'image de l'écran du radar de 10 cm se met à tourner dans tous les sens et l'alarme visuelle du compas apparaît. Quelques moments plus tard, le pilote sort et se rend sur l'aileron bâbord pour faire un appel de son radiotéléphone VHF portable, afin de s'informer des conditions météorologiquesNote de bas de page 10. Pendant ce temps, l'OQ informe le capitaine au sujet de l'image radar sautillante; les deux discutent brièvement, après quoi le capitaine quitte la passerelle. À ce moment, le navire commence à venir sur tribord sans qu'on s'en aperçoive, son cap passant d'environ 218° G à 231° G.
Pendant que le pilote est à l'extérieur, sur l'aileron, il aperçoit sur l'avant bâbord un feu clignotant blancNote de bas de page 11 qui semble s'éloigner, et il se dit qu'il peut s'agir du phare de Hawkesbury, situé à la pointe ouest de l'île Hawkesbury. Cependant, constatant que la limite de secteur de ce feu en direction nord est limitée, et que les caractéristiques du feu sont différentes, et s'apercevant aussi que le vent a changé, il rentre à l'intérieur de la timonerie à 22 h 42 min 49 sNote de bas de page 12.
Une fois revenu à l'intérieur, le pilote jette un coup d'œil à l'écran de l'ordinateur portable du second pilote, lequel indique que le navire s'est écarté de son cap. Il se déplace ensuite vers l'axe et constate que le cap indiqué sur le répétiteur numérique du gyro-compas oblique vers tribordNote de bas de page 13, mais que le répétiteur analogique à DEL affiche un cap stable au 218° G. Le répétiteur du gyro-compas du poste de barre affiche aussi un cap stable au 218°. Le pilote consulte les écrans du radar de 3 cm et du radar de 10 cm et l'ECS. Les informations disponibles sont contradictoires.

Le pilote remarque ensuite un feu clignotant blanc par le travers sur tribordNote de bas de page 14 et peut aussi distinguer le sommet des montagnes sur l'avant du navire. Il ordonne immédiatement à l'OQ d'appeler le capitaine et demande qu'on allume un projecteur. Le pilote ordonne de mettre la barre à gauche toute à 22 h 44 min 05 s. Dès que le navire commence à abattre sur bâbord, le répétiteur à DEL et le répétiteur du gyro-compas du poste de barre commencent à indiquer le virage vers bâbord. Toutefois, ils ne sont plus synchronisés correctement avec le gyro-compas.
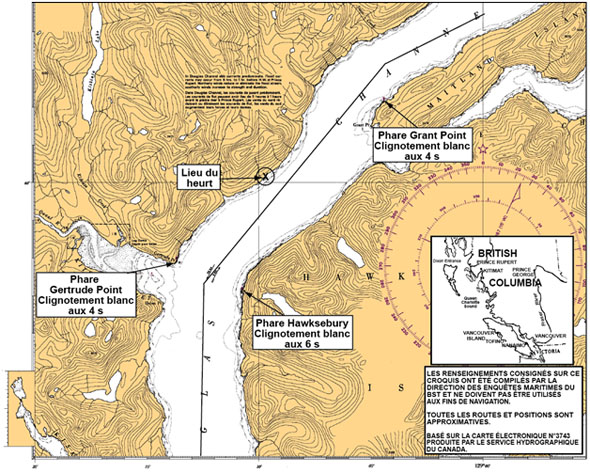
Après que l'OQ l'a appelé, le capitaine revient sur la passerelle à 22 h 44 min 46 s, au moment où le pilote ordonne de mettre les machines en arrière toute. L'évolution sur tribord s'arrête à 316° G, mais le navire heurte le rivage vers 22 h 45 min 25 s par 53°40,6′N, 129° 08,8′W (voir l'annexe A).
L'équipage détermine que la proue a été avariée et a une voie d'eau, mais ne relève aucun signe visible de pollution. Le capitaine et le pilote décident de revenir à Kitimat, où l'on pourra procéder à une évaluation des avaries en bonne et due forme. À 23 h 13, le pilote signale le heurt au centre des SCTM de Prince Rupert et l'informe qu'il compte retourner à Kitimat. Le pilote n'informe pas le centre des SCTM des avaries subies par le navire, mais il demande l'assistance d'un remorqueur pour l'arrivée du navire à Kitimat.
Le 26 septembre à 01 h 42, le navire jette l'ancre au large de Kitimat.
Récupération des données de l'enregistreur simplifié des données de voyage
Le S-VDR qui équipait le Petersfield a enregistré le son à différentes positions sur la passerelle, ainsi que les communications des radiotéléphones VHF. Il a aussi enregistré les chaînes de données NMEANote de bas de page 15 du gyro-compas numérique, du GPS, du sondeur et du loch. Les chaînes de données de la NMEA comprennent notamment des informations comme la position, la vitesse fond, le cap gyromagnétique, la vitesse angulaire de gyration et l'écart latéral. Le S-VDR a aussi enregistré les copies d'écran du radar de 10 cm à des intervalles de 15 secondes. Il ne consigne pas la position de la barre à gouverner ni l'angle de barre.
Après l'événement, on a téléchargé les données du S-VDR portant sur la période qui débute avant l'arrivée des pilotes à bord du navire, à Kitimat, et qui se termine après le retour du navire.
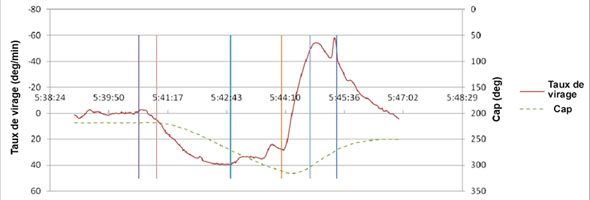
La carte à l'annexe B montre le secteur de l'événement et la position de chaque moment clé, ainsi que l'information relative au cap, à la route et à la vitesse. À l'annexe C, on trouvera une représentation graphique du cap et de la vitesse angulaire de gyration du navire pendant la durée de l'événement.
Certificats du navire
L'équipage et l'équipement du navire étaient conformes à la réglementation en vigueur. De plus, le navire faisait l'objet d'un certificat valide de système de gestion de la sécuritéNote de bas de page 16 conformément aux exigences du Code international de gestion pour la sécurité de l´exploitation des navires et la prévention de la pollution (Code ISM).
Brevets et expérience du personnel
Le capitaine, les officiers et les membres de l'équipage étaient titulaires de certificats de compétence appropriés pour le voyage prévu et le type de navire auquel ils étaient affectés.
Le capitaine a travaillé pour la même compagnie pendant 21 ans, dont 6 ans à titre de capitaine, et a passé la majorité de ces années à bord du Petersfield.
L'officier de quart avait servi environ 18 mois à bord de divers navires depuis qu'il avait obtenu un brevet de deuxième lieutenant en 2007. Il en était à son deuxième contrat à bord du Petersfield. Ces contrats à bord du Petersfield prévoyaient 10 semaines de service et 10 semaines de congé.
Le pilote était titulaire d'une licence de pilotage de classe I et il travaillait pour la British Columbia Coast Pilots Ltd. (BCCP) depuis 12 ans.
Le pilote et le capitaine avaient tous deux reçu la formation sur la gestion des ressources à la passerelle. L'OQ n'avait pas reçu cette formation.
Le timonier avait navigué à titre de matelot de pont depuis 1990. Il en était à sa deuxième affectation à bord du Petersfield, ayant été intégré à l'effectif 8 mois auparavant.
Avaries subies par le navire
Une inspection sous-marineNote de bas de page 17 a révélé que la coque avait été percée vis-à-vis du coqueron avant et que l'étrave à bulbe avait été enfoncée entre les membrures 227 et 238, de la marque de tirant d'eau de 8 m jusqu'à 6 m plus bas, surtout du côté tribord.
On a constaté que la plupart des varangues, des serres, des membrures et des goussets avaient été gauchis, déformés ou rompus entre les membrures 220 et 238 du coqueron avant. Un gauchissement des membrures a aussi été observé dans la cloison d'abordage. Le pont de l'atelier d'entretien, au-dessus du coqueron avant, était déformé et rompu à 3 endroits.

Conditions météorologiques et géographie
Le chenal Douglas a des rives escarpées qui s'élèvent rapidement pour constituer la base de hautes montagnes. Les falaises abruptes orientent le sens du vent, qui vient soit du large, soit de la terre.
La bouée météo d'Environnement Canada la plus proche était située sur le haut-fond Nanakwa, à 15 milles marins au nord-est du lieu de l'événement; vers l'heure à laquelle l'événement s'est produit, la bouée indiquait des vents de 10 nœuds soufflant de l'ouest-sud-ouest, avec des rafales à 12 nœuds. Les conditions météo auxquelles le navire a été exposé étaient les suivantes : vents du large soufflant à 30 nœuds et bonne visibilité. La marée descendante occasionnait un courant de 0,3 à 0,7 nœud.
Équipement de navigation amélioré
En 2005, on a installé un nouveau gyros-compas numérique et un convertisseur synchronumérique à bord du PetersfieldNote de bas de page 18. On a conservé le gyro-compas analogique original et on a installé un interrupteur permettant de choisir l'un ou l'autre des deux gyro-compas. À l'exception du répétiteur numérique installé à l'avant de la passerelle, qui a aussi été remplacé, on a conservé les 4 anciens répétiteurs analogiques (un sur chaque aileron de passerelle, le répétiteur à affichage à DEL, et un autre au poste de barre).
En avril 2009, on a remplacé le radar de 3 cm et l'ECS par des appareils neufs. On a réglé le convertisseur synchronumérique de façon à ce qu'il fournisse un signal de cap numérique à ces équipements qu'on venait d'installer, mais le convertisseur continuait d'envoyer un signal de cap analogique à l'ancien radar de 10 cm et à 4 des 5 répétiteurs.
Les spécifications du fabricant du convertisseur synchronumérique qu'on a installé à bord apporte les précisions suivantes au sujet de la vérification des répétiteurs existants :
Au moment de remplacer un gyro-compas vieux ou usé, on a parfois découvert trop tard qu'il y avait aussi des répétiteurs vieux et usés. Or, un seul répétiteur qui fige peut rendre le système complètement inopérant. […] Vous feriez bien d'aviser le propriétaire que tous les répétiteurs doivent faire l'objet d'une vérification mécanique, y compris les balais des convertisseurs synchronumériques. Les instructions de montage du KW903 donnent des conseils à ce sujet, mais notre garantie ne s'applique pas aux répétiteurs défectueux. [Traduction]
Défectuosité du signal de cap
Avant qu'on appelle à Zhenjiang, le navire avait connu des défectuosités répétées de la ligne de foi, qui se déplaçait de façon irrégulière sur l'écran du radar de 3 cm et sur l'ECS, mais pas sur l'écran du radar de 10 cm. Après chaque dérèglement, on réinitialisait à la main la ligne de foi. Malgré plusieurs essais, les techniciens de service n'ont pas été capables de reproduire et de corriger les défectuosités intermittentes.
Le 23 septembre, un technicien de service est de nouveau monté à bord du navire pendant que celui-ci était à Kitimat pour trouver la cause du dérèglement de la ligne de foi. En utilisant un répartiteur, on a redirigé le signal de cap NMEA du gyro-compas directement à l'ECS et au radar de 3 cm, contournant ainsi le convertisseur synchronumérique. Le technicien a testé le gyro-compas avec ses répétiteurs et ses signaux de cap en fonction des indications de l'équipement de navigation. Il a déterminé qu'ils étaient en bon état de fonctionnement.
Après l'événement, le même technicien est monté de nouveau à bord du navire le 26 septembre à Kitimat, et a inspecté le système du gyro-compas et le convertisseur synchronumérique. Il a contrôlé la tension de ligne du convertisseur et a constaté qu'elle était correcte. Toutefois, il a trouvé quelques connexions lâches dans le convertisseur synchronumérique, le boîtier de distribution du gyro-compas et la console de commande de barre. Le système a été mis en mode d'essai, et les répétiteurs se sont arrêtés après 8 rotations complètesNote de bas de page 19 du gyro-compas, lorsque le convertisseur synchronumérique a commencé à chauffer. Après qu'on les a laissés refroidir, les répétiteurs ont recommencé à fonctionner. On a constaté que le ventilateur à l'intérieur du convertisseur synchronumérique était défectueux. Le technicien a nettoyé le ventilateur et a recommandé qu'on le remplace si le problème persistait. Des tests plus poussés ont révélé que le système du gyro-compas, avec ses répétiteurs, fonctionnait bien. Par la suite, le navire a navigué jusqu'à Vancouver et on n'a signalé aucun problème quant aux signaux de cap.
Le 14 octobre, des techniciens de service d'une entreprise différente sont montés à bord du navire à Vancouver (Colombie-Britannique). Les techniciens ont contrôlé les connexions, ont isolé l'équipement du convertisseur synchronumérique et ont procédé à un test d'auto-contrôle, lequel s'est avéré satisfaisant. Après avoir déconnecté son ventilateur interne, on a fait l'essai du convertisseur synchronumérique pendant 2 heuresNote de bas de page 20. On a ensuite comparé l'affichage du répétiteur analogique de cap et on a constaté un écart d'environ 20 degrés. Après qu'on a réinitialisé le système, les caps affichés par les répétiteurs variaient de façon importante, même si la DEL d'affichage de l'état du convertisseur synchronumérique indiquait qu'il n'y avait aucun problème. On a débranché et rebranché le système, après quoi il s'est stabilisé. Par la suite, le propriétaire a ordonné qu'on remplace le convertisseur synchronumérique.
Alarmes de l'équipement de navigation
Avant que le navire appareille de Kitimat, on a chargé dans l'ECS le plan de voyage du navire dans le chenal Douglas. À certains endroits, la route du navire passait à tout au plus 0,25 nm de la terre la plus proche. On a augmenté le réglage par défaut de l'alarme d'écart de route (XTE) de l'ECS pour le faire passer de 0,05 nm à 0,19 nm, et on a désactivé l'alarme sonore du XTE. On a procédé ainsi parce qu'on prévoyait que le plan de voyage du navire ne coïnciderait pas exactement avec celui du pilote et que cela pourrait occasionner des alarmes fréquentes. L'alarme XTE du GPS a été réglée à 0,25 nm. Toutes les alarmes sonores du radar de 10 cm avaient été désactivées.
Gestion des ressources à la passerelle
La gestion des ressources à la passerelle (GRP) vise à assurer une gestion et une utilisation efficaces de toutes les ressources humaines et techniques dont l'équipe de passerelle dispose, pour faire en sorte que le voyage se fasse en toute sécurité. La GRP inclut des considérations relatives à la planification du voyage, la taille et la composition de l'équipe de passerelle, le leadership, les communications et les relations interpersonnelles, la conscience de la situation, la résolution de problèmes et la prise de décisions. En zone de pilotage obligatoire, l'équipe de passerelle comprend le pilote.
Lors de cet événement, dès que les pilotes sont montés à bord, l'échange entre le capitaine et le pilote a été effectué et une fiche d'échange de renseignements entre le capitaine et le pilote a été remplie. L'échange de renseignements a porté sur les points suivants :
- le système de communication Sat Com B et le télécopieur étaient encore défectueux;
- les problèmes de dérèglement de ligne de foi avaient été réglés;
- tous les autres équipements de navigation et machines fonctionnaient comme il se doit;
- toutes les cartes pertinentes étaient à bord en vue du voyage;
- le navire avait produit un plan de traversée pour le voyage.
Il n'y a eu aucune discussion au sujet du plan de voyage du pilote et des différences entre ce dernier plan et celui que les responsables du navire avaient produit. Il n'y a pas eu de discussion au sujet de l'état des alarmes des différents éléments de l'équipement de navigation.
Pilotage et planification du voyage
Sur la côte Ouest du Canada, l'exploitation, le maintien et l'administration des services de pilotage dans les zones de pilotage obligatoire incombent à une société d'État, l'Administration de pilotage du Pacifique (APP). La BCCP est une entreprise privée qui emploie des pilotes maritimes brevetés et qui a passé un contrat avec l'Administration de pilotage du Pacifique pour la prestation des services de pilotage.
En vertu du paragraphe 25(2) de la Loi sur le pilotage, « le pilote breveté qui assure la conduite d'un navire est responsable envers le capitaine de la sécurité de la navigation du navire »
.
Les zones de pilotage obligatoire pour la côte Ouest du Canada, dans lesquelles on considère que les connaissances locales sont essentielles pour assurer la sécurité et l'efficacité de la navigation, sont énumérées dans le Règlement sur le pilotage dans la région du Pacifique. Ces zones comprennent l'ensemble des eaux côtières de la Colombie-Britannique.
Les plans de voyage ordinaires sont définis en fonction des routes à suivre. On déroge au plan pour tenir compte de facteurs externes comme les courants, les conditions météorologiques et le trafic, et de facteurs intrinsèques comme la taille et la manœuvrabilité des navires.
Pour la planification de leur voyage, les pilotes de la BCCP font davantage appel à des couloirs de navigation qu'à des lignes de tracé. La BCCP affirme que, pour assurer le routage des navires, il est plus prudent d'utiliser des couloirs de navigation dont chacun offre une variété d'itinéraires possibles. Les couloirs permettent au pilote de tenir compte de variables comme les courants, les conditions météorologiques, le trafic, la taille des navires et leur caractéristiques de manoeuvre. Grâce à cette façon de procéder, on évite de concentrer le trafic le long des tracés publiés. L'information relative à ces couloirs n'a pas fait l'objet d'une publication, et les navires n'ont pas accès au plan de voyage d'un pilote avant que le pilote ne soit à bord du navire et qu'il n'ait donné ses instructions au personnel navigant. Chaque pilote de la BCCP élabore son propre plan de voyage en se basant sur son carnet des routes, sur ses observations et son expérience.
Lors de l'événement, le pilote s'est servi des informations contenues dans son carnet des routes personnel pour établir son plan de voyage. Ces informations n'ont pas été entrées dans l'ECS avant le début du voyage et elles n'ont pas non plus été communiquées aux autres membres de l'équipe de passerelle.
Analyse
Défectuosité du signal de cap
Après l'événement, un technicien de service a vérifié le système gyroscopique à Kitimat et a observé que le convertisseur synchronumérique surchauffait et que le ventilateur interne de refroidissement ne fonctionnait pas comme il le devait. Plus tard, après qu'on a eu fait l'entretien du ventilateur, le navire a fait la traversée jusqu'à Vancouver sans incident. À Vancouver, un autre technicien de service a débranché le ventilateur interne pour trouver la cause de la surchauffe du système, et a aussi constaté que l'appareil était défectueux. Il convient toutefois de noter que les paramètres de ces tests ont exigé un effort du convertisseur synchronumérique beaucoup plus important que celui qui est fourni dans des conditions d'utilisation normale. Il s'ensuit que les résultats de ces tests, même s'ils suggèrent une surchauffe de l'appareil, ne sont pas concluants.
Quoi qu'il en soit, durant le voyage lors duquel l'événement a eu lieu, le signal de cap transmis au radar de 10 cm en provenance du convertisseur synchronumérique a été défectueux. Cette panne a coïncidé avec le « blocage »
du répétiteur à DEL et du répétiteur de la console de commande de barre. Cette défectuosité découle de 3 causes possibles :
- une surchauffe due au blocage d'un vieux répétiteur;
- une défectuosité interne du convertisseur;
- des connexions lâches à l'intérieur du boîtier du convertisseur synchronumérique, du boîtier de distribution du gyro-compas ou de la console de commande de barre.
Il y a vraisemblablement un lien entre les ratés du radar de 10 cm et ceux des répétiteurs, mais il a été impossible de le confirmer.
Événements qui ont précédé le heurt
Un navire dévie de sa route en raison d'une influence qui peut être interne ou externe. En ce qui a trait aux influences externes, on a constaté que la marée et les courants étaient négligeables dans le chenal au moment de l'événement, de sorte que l'on considère qu'ils n'ont pas été un facteur. Le centre de la surface latérale d'emprise au vent du navire se trouvait sur l'arrière et, par conséquent, le vent du sud soufflant du large à 30 nœuds aurait opposé une résistance à un changement de cap sur tribord. On considère donc que le vent n'a pas été un facteur susceptible d'amorcer le changement de cap en direction de la rive ouest du chenal de Douglas.
Des influences internes, par exemple une défectuosité de la barre ou de l'appareil à gouverner, un décalage du gouvernail ou le fait de mettre la barre à droite, peuvent faire en sorte qu'un navire change de direction. Toutefois, les 2 premières influences ont été éliminées, vu que le navire a répondu aux ordres de barre subséquents et qu'il n'y avait eu aucun rapport concernant un décalage du gouvernail.
On a procédé à une analyse détaillée des données du S-VDR pour savoir si la barre avait été mise à droite. En reportant le cap du navire et sa vitesse angulaire de gyration en fonction du temps (voir l'annexe C), on voit que, quand le radar de 10 cm a commencé à connaître des ratés, la vitesse angulaire du navire était vers la gauche. Pour que le timonier puisse maintenir le cap du navire, il était nécessaire de faire une légère correction de routine vers tribord.
Comme les répétiteurs analogiques du navire ont figé au même moment, et comme le timonier se servait de ces instruments comme moyens de référence, les répétiteurs n'ont pas dû lui donner d'indications à savoir qu'il fallait modifier l'angle de barre. Il est donc fort probable qu'on a fait une légère correction de routine vers tribord et qu'on a maintenu la barre à cette position par la suite, de sorte que le navire a continué de venir sur tribordNote de bas de page 21. On ne peut pas savoir avec certitude pourquoi le timonier a maintenu la barre à droite, mais on peut avancer 2 possibilités : soit qu'il n'a pas observé l'indicateur d'angle de barre, soit qu'il l'a observé mais qu'il n'en a pas tenu compte parce que le cap ne changeait pas.
Quoi qu'il en soit, les données du S-VDR indiquent que la vitesse angulaire de gyration a continué de venir sur tribord jusqu'à un peu après que le pilote soit rentré de nouveau dans la timonerie, comme on peut le voir à l'annexe C (entre les points C et D). Il est vraisemblable que le timonier, ayant été alertée d'un problème, a corrigé vers bâbord à ce moment. Toutefois, quand le pilote a ordonné de mettre la barre à gauche toute (75 secondes après être rentré dans la timonerie), le navire n'était qu'à un peu plus de 0,2 nm de la rive. À une vitesse de 12 nœuds et suivant un cap au 312° G, le navire était trop près de la rive et l'impact était devenu inévitable. Le navire avait commencé à venir sur bâbord quand l'avant tribord a heurté la rive à un angle de 30° à 45° par rapport à son cap. Le navire avançait alors à environ 10 nœuds.
Surveillance du déplacement du navire
Quand on navigue dans des eaux restreintes comme celles du chenal Douglas qui obligent à circuler près des rives, il est essentiel de surveiller constamment le déplacement du navire, surtout si le bâtiment navigue à pleine vitesse durant la nuit, et s'il y a très peu de points de repère à terre.
Lors de cet événement, plusieurs circonstances simultanées ont eu une incidence sur la surveillance de la progression du navire :
- L'officier de quart (OQ) a été distrait par les rotations désordonnées de l'image du radar de 10 cm et par ses efforts visant à synchroniser les données du cap radar avec celles du gyro-compas.
- Les répétiteurs gyromagnétiques du timonier ont mal fonctionné et lui ont indiqué que le navire suivait encore le cap voulu, au 218° G.
- Le pilote est sorti pour se rendre sur l'aileron. Bien que cela se soit passé tout juste après la défectuosité du signal du gyro-compas, il n'y avait aucune indication que les instruments qu'il surveillait ne fonctionnaient pas bien, et il n'a pas été avisé par l'OQ de la défectuosité toute récente du radar de 10 cm.
- Après avoir été informé du problème affectant le radar de 10 cm, le capitaine a quitté la passerelle.
Pour ces raisons, on ne s'est pas rendu compte que le navire virait sur tribord pendant 2 minutes et 15 secondes, soit jusqu'à ce que le pilote soit alerté par des indices visuels attribuables à des aides à la navigation terrestres et par un changement du vent apparent. À ce moment, la vitesse angulaire de gyration avait augmenté et atteignait presque 40° par minute vers la droite, le cap avait changé de plus de 50°, et le navire n'était plus qu'à environ 0,4 nm de la rive (voir l'annexe B) et courait un danger.
Alarmes d'écart de route
L'alarme d'écart de route est censée avertir l'équipe de passerelle lorsque le navire s'écarte de sa route d'une valeur prédéterminée. Pour ce faire, le système contrôle constamment la position du navire par rapport à la route consignée par un utilisateur.
Le réglage par défaut de l'alarme d'écart de route du système de cartes électroniques (ECS) du Petersfield était de 0,05 nm, mais il avait été augmenté à 0,19 nm pour ce voyage en particulier. Le réglage par défaut de l'alarme d'écart du système de positionnement global (GPS) était de 0,25 nm.
Lorsque le pilote est rentré dans la timonerie et a indiqué que quelque chose n'allait pas, la distance d'écart de route (par rapport au plan de voyage) était de 0,04 nm, et l'alarme n'aurait pas pu avertir l'équipe de passerelle plus tôt.
Il est admis que l'ECS et le GPS du Petersfield n'étaient que 2 des nombreux instruments qui auraient pu donner des informations utiles à l'équipe de passerelle. Toutefois, les réglages des alarmes d'écart de route du GPS de l'ECS ont fait en sorte que, lors de cet événement, l'équipe de passerelle n'a pas pu bénéficier de moyens d'alarme disponibles. L'équipe a donc été privée de 2 outils potentiellement utiles, et a été exposée à un risque accru.
Gestion des ressources à la passerelle
On définit le rendement comme étant « une fonction du comportement et des réalisations d'une personne ou d'un groupe de personnes. Le rendement inclut les actions d'une personne ou d'un groupe et les résultats de son ou de ses actions »
Note de bas de page 22[Traduction]. À partir de cette définition, on peut faire plusieurs observations au sujet du rendement de la gestion des ressources à la passerelle (GRP) à bord du Petersfield.
Mise en commun de l'information
Même si le radar de 10 cm avait connu des problèmes de signaux de cap à 7 occasions différentes en moins de 75 minutes, cette information n'a pas été communiquée efficacement à tous les membres de l'équipe de passerelle. Bien que l'OQ ait informé le pilote du problème à la cinquième occasion, il n'a pas précisé que le problème se produisait fréquemment. Le problème a été mentionné lors des communications radio avec le centre des SCTM de Prince Rupert, mais le pilote, le capitaine et l'OQ n'en ont pas discuté entre eux.
Le capitaine n'a pas été informé du problème jusqu'à ce que l'image du radar de 10 cm se mette à tourner dans tous les sens, en l'occurrence la dernière fois où la défectuosité s'est produite avant que le navire heurte la rive. En outre, le pilote n'a pas été informé de cette défectuosité du radar à ce moment.
Ce manque de communication pourrait s'expliquer par le fait que le capitaine et l'OQ ne trouvaient pas qu'il s'agissait d'un problème grave puisqu'ils avaient commencé à avoir des difficultés similaires avec l'ECS et le radar de 3 cm environ 4 semaines avait d'arriver à Kitimat, le 19 septembre. Cela dit, comme cette information n'a pas été communiquée aux intéressés, on a raté l'occasion de gérer immédiatement le problème ou de l'atténuer plus tôt.
Communication des plans de voyage
Dans les zones de pilotage, la sécurité des navires exige que tous les membres de l'équipe de passerelle aient une compréhension commune des détails du voyage. Cela s'avère particulièrement important, étant donné que les capitaines et les membres de l'équipe ne sont pas toujours informés des conditions locales et qu'il arrive souvent que les pilotes ne soient pas au courant des caractéristiques de manœuvre d'un navire. Par conséquent, un plan de voyage détaillé, sur lequel tout le monde s'entend (même s'il est plus ou moins défini) est essentiel puisqu'il permet aux membres de l'équipe de passerelle de mettre en commun les informations relatives à la navigation, de suivre le déplacement du navire, d'identifier les écarts et de discuter de leurs préoccupations concernant la navigation. Le plan de voyage s'avère particulièrement avantageux quand on navigue dans des eaux restreintes.
Lors de cet événement, dès que les pilotes sont montés à bord, des informations clés n'ont pas été communiquées à ceux qui étaient les mieux placés pour assurer la sécurité du navire. Même si la fiche d'échange de renseignements entre le capitaine et le pilote a été remplie, le pilote n'a pas partagé le plan de voyage qu'il avait établi, ce plan n'a pas été entré dans l'ECS, et le reste de l'équipe n'a pas demandé de détails. Par conséquent, l'équipe de passerelle n'a pas eu une connaissance complète et commune de la route prévue du navire, et pouvait donc être privée de la possibilité de suivre efficacement le déplacement du navire.
Modifications apportées à l'équipement de navigation
Pour que les nombreux appareils qu'on trouve sur la passerelle fournissent un rendement efficace, il est essentiel qu'ils soient en interconnexion, de façon que les renseignements voulus soient transmis aux appareils qui ont besoin de ces renseignements, et que ces derniers relaient l'information aux autres appareils de la passerelle qui en ont besoin. Par exemple, un radar se sert des données transmises par le gyro-compas, par le loch et par le GPS et, à son tour, transmet l'information à l'ECS. Il s'ensuit que toute défaillance d'un de ces éléments peut affecter le fonctionnement d'autres équipements de la passerelle. Le problème peut être exacerbé lorsqu'on ajoute de nouveaux éléments au système ou qu'on remplace des vieux éléments par des neufs.
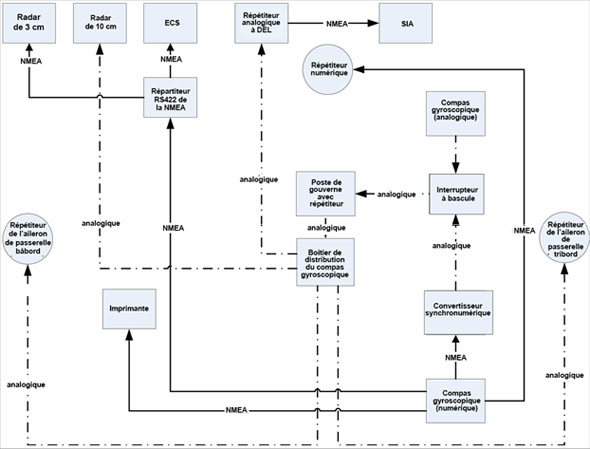
Sur la passerelle du Petersfield, le gyro-compas numérique transmettait un signal analogique converti au répétiteur analogique à DEL, par l'entremise du convertisseur synchronumérique. Ce répétiteur, à son tour, envoyait les informations numériques converties relatives au cap vers le système d'identification automatique (AIS) (voir la figure 2). Après qu'on a redirigé leur signal d'entrée à Kitimat, le radar de 3 cm et l'ECS recevaient leurs données directement du gyro-compas numérique, le convertisseur synchronumérique étant contourné. Il s'ensuit que ces appareils ne pouvaient plus recevoir au besoin des informations sur le cap en provenance du gyro-compas analogique, ce qui fait que la redondance du système était supprimée.
Lors de cet événement, la défectuosité du signal de cap transmis au radar de 10 cm, quelle qu'en soit la cause, a dû affecter aussi le fonctionnement du répétiteur analogique à DEL et du répétiteur de la console de commande de barre dont le timonier se servait. Cette défectuosité a contribué à faire dévier le navire de la route à suivre. De plus, la situation a fait en sorte que certains appareils affichaient des renseignements inexacts alors que d'autres indiquaient des renseignements exacts. Cela a causé une certaine confusion puisque le pilote se savait plus à quels appareils il devait se fier, si bien qu'il a fallu plus de temps pour déterminer la position et le cap véritables du navire.
Comme l'a démontré cet événement, quand on intègre des nouveaux équipements à des installations plus vieilles, on doit tenir dûment compte des interconnexions entre les appareils, sans quoi on risque de créer des interdépendances non désirées ou de supprimer la redondance des systèmes, d'où un accroissement des risques associés à une défectuosité du système.
Faits établis
Faits établis quant aux causes et aux facteurs contributifs
- Après que le navire est parti de Kitimat, il s'est produit une défectuosité du système à la suite de laquelle l'information sur le cap relayée au radar de 10 cm a été intermittente et fluctuante et l'affichage des répétiteurs analogiques a figé.
- Au moment où les répétiteurs ont figé, le timonier a effectué comme d'habitude, une correction de cap mineure sur tribord à la suite de laquelle le navire a commencé à éviter vers tribord et a continué de tourner.
- Comme le pilote s'était rendu à l'extérieur, sur l'aileron, et comme l'OQ était distrait en raison du problème qui affectait le radar de 10 cm, on n'a pas fait une surveillance efficace du déplacement du navire, et le navire a continué de virer sur tribord pendant plus de 2 minutes avant que le pilote s'aperçoive que le navire s'écartait de sa route.
- L'information relative aux problèmes répétés qui affectaient le radar de 10 cm n'a pas été partagée efficacement. Pour cette raison, on a raté une occasion de gérer rapidement le problème, ou de l'atténuer plus tôt.
Faits établis quant aux risques
- Faute d'un plan de voyage détaillé, sur lequel tout le monde s'entend, les membres de l'équipe de passerelle sont privés de moyens qui leur permettraient de faire une surveillance efficace du déplacement du navire, ce qui va à l'encontre des principes de la gestion des ressources à la passerelle.
- Quand on ne tient pas compte adéquatement des interdépendances qui existent entre les appareils électroniques au moment d'intégrer de nouveaux équipements à des installations plus vieilles, on est susceptible de créer une dépendance inopportune d'un système sur un autre, ou de supprimer la redondance des systèmes, d'où un accroissement des risques associés à une panne ou une défectuosité dans le système.
Mesures de sécurité
Mesures de sécurité prises
Après avoir mené une enquête interne sur cet événement, le propriétaire du navire a mis en œuvre plusieurs mesures de sécurité :
- on a remplacé 8 des 11 convertisseurs synchronumériques similaires qui étaient en usage à bord de navires de la flotte du propriétaire;
- une alarme du gyro-compas-GPS, qui est visible du poste de barre, sera installée à bord de 25 navires par année pendant une période de 3 ans;
- on a élaboré ou mis à jour diverses procédures de navigation relatives aux valeurs de réglage des alarmes de l'ECS/du SEVCM et de l'établissement des plans de voyage.
Le présent rapport met un terme à l'enquête du bureau de la sécurité des transports du Canada (BST) sur cet événement. Le Bureau a autorisé la publication du rapport le .
Annexes
Annexe A - Croquis du lieu de l'événement
Annexe B
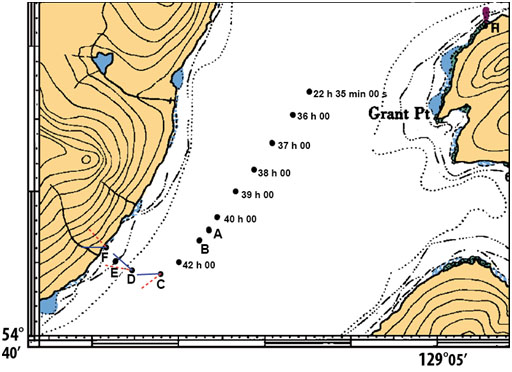
Note : Le cap (ligne pleine) et la route fond (ligne pointillée) sont indiqués pour les dernières positions.
| Heure (UTC) | Lettre | Événement | Cap gyro Note de bas de page 23 | Route fond | Vitesse fond (nœuds) |
|---|---|---|---|---|---|
| 5:40:34 | A | Premier sautillement de l'image radar Note de bas de page 24 | 217,9 | 218 | 12,5 |
| 5:41:00 | B | Le pilote quitte la timonerie Note de bas de page 25 | 218,0 | 218 | 12,5 |
| 5:42:49 | C | Le pilote rentre à l'intérieur de la timonerie | 271,2 | 233 | 11,7 |
| 5:44:04 | D | Barre à gauche toute | 311,3 | 280 | 10,6 |
| 5:44:46 | E | Machines en arrière toute | 302,9 | 306 | 10,6 |
| 5:45:25 | F | Heurt violent | 270,1 | 316 | 10,4 |
Annexe C - Données du S-VDR